频控阵(FDA)与相控阵天线方向图深度解析:理论 + MATLAB 实战
引言
在现代雷达、通信等电子系统中,阵列天线是核心部件之一,其波束指向特性直接决定了系统的探测精度、抗干扰能力和通信安全性。相控阵雷达凭借灵活的空域波束扫描能力,已广泛应用于各类场景,但它存在一个致命缺陷 ------ 波束指向与距离无关,无法在同一快拍内对不同距离的目标实现精准波束控制。
2006 年,频控阵(Frequency Diverse Array, FDA)雷达概念的提出,彻底打破了这一限制。FDA 通过在相邻阵元施加微小频率增量,使发射波束具备独特的距离依赖性,既能继承相控阵的相干信号特性,又能实现距离 - 方位角二维波束调控,在杂波抑制、目标定位、射频隐身等场景中展现出巨大潜力。
本文将结合权威学术成果与工程实战代码,从理论原理、代码实现、结果分析到实际应用,全面拆解 FDA 与相控阵天线方向图的核心差异,帮助读者掌握两种阵列技术的本质区别与工程实现方法。
一、核心理论基础:FDA 与相控阵的本质差异
1.1 相控阵天线核心原理
相控阵天线的所有阵元发射相同频率的相干信号,通过调节各阵元的相位差实现波束空域扫描。其核心特点是:波束指向仅与方位角相关,与距离无关。
相控阵的阵列方向图数学表达式为:
F ( θ ) = sin N π d λ ( sin θ − sin θ 0 ) N sin π d λ ( sin θ − sin θ 0 ) F(\theta) = \frac{\sin\leftN\\pi\\frac{d}{\\lambda}(\\sin\\theta - \\sin\\theta_0)\\right}{N\sin\left\\pi\\frac{d}{\\lambda}(\\sin\\theta - \\sin\\theta_0)\\right} F(θ)=Nsinπλd(sinθ−sinθ0)sinNπλd(sinθ−sinθ0)
其中, N N N为阵元数, d d d为阵元间距, λ \lambda λ为信号波长, θ \theta θ为观测方位角, θ 0 \theta_0 θ0为期望波束指向角。
从公式可见,相控阵的波束形成仅依赖方位角参数,无论目标距离远近,波束指向始终保持不变,这导致其在距离相关干扰抑制、多距离目标分辨等场景中性能受限。
1.2 FDA 天线核心原理
FDA 的核心创新的是在相邻阵元上施加远小于载频的频率增量 Δ f \Delta f Δf,第 m m m个阵元的发射频率为:
f m = f 0 + m ⋅ Δ f ( m = 0 , 1 , ⋯ , M − 1 ) f_m = f_0 + m\cdot\Delta f \quad (m=0,1,\cdots,M-1) fm=f0+m⋅Δf(m=0,1,⋯,M−1)
其中, f 0 f_0 f0为载频, M M M为阵元总数。
FDA 的阵列方向图数学表达式为:
F ( r , θ ) = sin { M π ( Δ f t − Δ f ⋅ r c + f 0 d sin θ c + Δ f d sin θ c ) } sin { π ( Δ f t − Δ f ⋅ r c + f 0 d sin θ c + Δ f d sin θ c ) } F(r,\theta) = \frac{\sin\left\{M\pi\left(\Delta f t - \frac{\Delta f \cdot r}{c} + \frac{f_0 d \sin\theta}{c} + \frac{\Delta f d \sin\theta}{c}\right)\right\}}{\sin\left\{\pi\left(\Delta f t - \frac{\Delta f \cdot r}{c} + \frac{f_0 d \sin\theta}{c} + \frac{\Delta f d \sin\theta}{c}\right)\right\}} F(r,θ)=sin{π(Δft−cΔf⋅r+cf0dsinθ+cΔfdsinθ)}sin{Mπ(Δft−cΔf⋅r+cf0dsinθ+cΔfdsinθ)}
其中, r r r为目标距离, c c c为光速。
关键特性总结:
-
波束指向与距离 r r r、方位角 θ \theta θ均相关,形成距离 - 方位角二维调控能力;
-
当 Δ f = 0 \Delta f=0 Δf=0时,FDA 退化为相控阵,体现了技术的兼容性;
-
波束具有周期性,通过调节 Δ f \Delta f Δf可灵活控制波束的距离覆盖范围。
1.3 两种阵列技术核心参数对比
| 阵列类型 | 工作模式 | 发射信号 | 波束指向特性 | 核心优势 |
|---|---|---|---|---|
| 相控阵 | 非正交载波 | 相干信号 | 仅方位角依赖 | 空域扫描灵活、技术成熟 |
| FDA | 非正交载波 | 相干信号 | 距离 - 方位角双依赖 | 二维波束调控、抗干扰能力强 |
二、MATLAB 代码实战:天线方向图绘制全解析
2.1 代码整体框架说明
本文提供的代码支持相控阵与 FDA 天线方向图的灵活绘制,核心功能包括:
-
相控阵:未归一化方向图、归一化方向图、二维热力图绘制;
-
FDA:三维波束图、距离 - 方位角二维热力图绘制;
-
可通过参数调节(阵元数、频偏、载频等)观察波束特性变化。
2.2 相控阵方向图代码逐行解析
clear all; clc;
disp('相控阵天线方向图请输入:1');
disp('频控阵天线方向图请输入:0');
flag=input('输入:');
close all;
% 相控阵天线方向图计算与绘制
if flag == 1
  disp('%相控阵天线方向图');
  N = 12; % 阵元数,可调整(建议5-20)
  % 方位角范围:-160°到160°,步长0.1°(弧度转换)
  alfa = -160\*pi/180:0.1\*pi/180:160\*pi/180;
  beta = 0\*pi/180; % 期望波束指向角(0°,可调整)
  len = length(alfa);
  falfabeta = zeros(1, len); % 存储方向图幅度
   
  % 循环计算每个方位角的波束幅度
  for i=1:len
  % 避免奇点(分母为0):当sin(alfa(i))=sin(beta)时,幅度=阵元数N
  if abs( sin(alfa(i)) - sin(beta) )<= 1e-6;
  falfabeta(i) = N;
  continue;
  else
  % 相控阵方向图核心公式
  falfabeta(i) = sin( N\*pi/2\*( sin(alfa(i)) - sin(beta) ) )...
  / sin( pi/2\*( sin(alfa(i)) - sin(beta) ) );
  end
  end
   
  alfa = alfa\*180/pi; % 弧度转回角度,便于绘图显示
   
  % 图1:未归一化相控阵方向图
  figure;
  plot(alfa, falfabeta);
  title('未归一相控阵方向图');
  ylabel('幅度');
  xlabel('方位角(°)');
   
  % 图2:归一化相控阵方向图(幅度归一到\[0,1])
  fimagesec = falfabeta; % 保存原始幅度用于热力图
  falfabeta = abs(falfabeta/max(abs(falfabeta)));
  figure;
  plot(alfa, falfabeta);
  title('归一化相控阵方向图');
  ylabel('归一化幅度');
  xlabel('方位角(°)');
   
  % 图3:相控阵方向图热力图(方位角-幅度二维分布)
  figure;
  title('相控阵方向图热力图(未归一化)');
  x=\[-60 60]; % 方位角显示范围
  y=\[-4 12]; % 幅度显示范围
  clims = \[-3 N]; % 颜色映射范围
  imagesc(x,y,fimagesec,clims);
  colormap(jet); % 颜色映射(可替换为parula、viridis等)
  colorbar; % 颜色条
   
  % 图4:归一化热力图
  figure;
  title('相控阵方向图热力图(归一化)');
  falfabeta = N\*falfabeta; % 恢复幅度量级
  clims = \[0 N];
  imagesc(x,y,falfabeta,clims);
  colormap(jet);
  colorbar;关键参数调节建议:
-
阵元数 N N N:增大 N N N可减小波束宽度,提高定向精度,但旁瓣电平会变化;
-
期望指向角 β \beta β:修改为 30°、60° 等,可观察波束扫描效果;
-
方位角范围:调整
alfa的起始和终止值,聚焦特定角度区间。
2.3 FDA 方向图代码逐行解析
else 
  disp('%频控阵天线方向图');
  N = 12; % 阵元数
  % 方位角范围:-80°到80°(FDA波束宽度较窄,聚焦核心区域)
  alfa = -80\*pi/180:0.01:80\*pi/180;
  len = length(alfa);
  % 距离范围:0到20km,均匀采样(模拟不同距离目标)
  range = 20e4-1:-(20e4/len):0;
  falfabeta = zeros(len, len); % 二维数组存储距离-方位角幅度
   
  % FDA核心参数设置
  f0 =10e9; % 载频(10GHz,典型雷达载频)
  c = 3e8; % 光速
  d = c/(2\*f0); % 阵元间距(半波长,避免栅瓣)
  deltaf = 3e3; % 频率增量(3kHz,远小于载频)
  t = 0; % 观测时刻(FDA波束随时间变化,可调整t观察时变特性)
   
  % 双重循环:遍历所有距离和方位角组合
  for i=1:len
  for j=1:len
  % 避免奇点(分母为0)
  if abs(sin( pi\*( deltaf\*t - deltaf\*range(i)/c + sin(alfa(j))/(2) ) )) <= 1e-6 ;
  falfabeta(i,j) = N;
  continue;
  else
  % FDA方向图核心公式(距离-方位角耦合)
  falfabeta(i,j) = abs(sin( N\*pi\*( deltaf\*t - deltaf\*range(i)/c - sin(alfa(j))/2 ) )...
  / sin( pi\*( deltaf\*t - deltaf\*range(i)/c - sin(alfa(j))/2 ) )) ;
  end
  end
  end
   
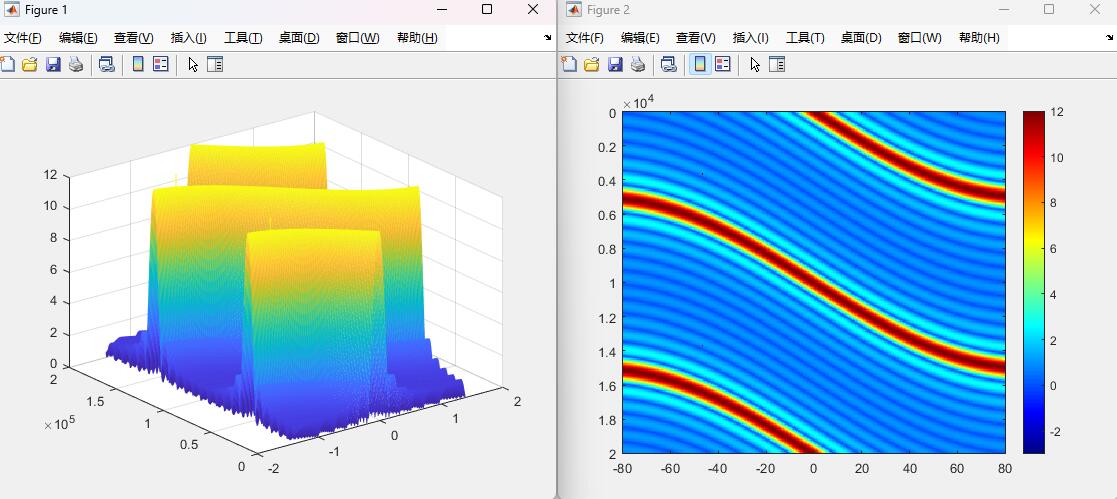
  % 图1:FDA三维波束图(距离-方位角-幅度)
  figure;
  mesh(alfa,range,(falfabeta));
  title('FDA三维波束方向图');
  xlabel('方位角(rad)');
  ylabel('距离(m)');
  zlabel('幅度');
  grid on;
   
  % 图2:FDA二维热力图(直观展示距离-方位角耦合特性)
  figure;
  title('FDA距离-方位角二维方向图');
  x=\[-80 80]; % 方位角显示范围(°)
  y=\[1 2e4]; % 距离显示范围(m)
  clims = \[-3 N]; % 颜色映射范围
  imagesc(x,y,falfabeta,clims);
  colormap(jet);
  colorbar;
  xlabel('方位角(°)');
  ylabel('距离(m)');
endFDA 核心参数调节与现象观察:
-
频率增量 δ f \delta f δf:增大 δ f \delta f δf(如 5kHz、10kHz),波束的距离依赖性增强,S 形特性更明显;
-
载频 f 0 f0 f0:修改为 5GHz、15GHz,观察阵元间距 d d d的自动调整对波束的影响;
-
观测时刻 t t t:设置 t = 100 μ s t=100\mu s t=100μs、 200 μ s 200\mu s 200μs,可观察 FDA 波束的时变特性(相控阵无此特性)。
三、结果分析:FDA 与相控阵方向图差异对比
3.1 相控阵方向图关键特征
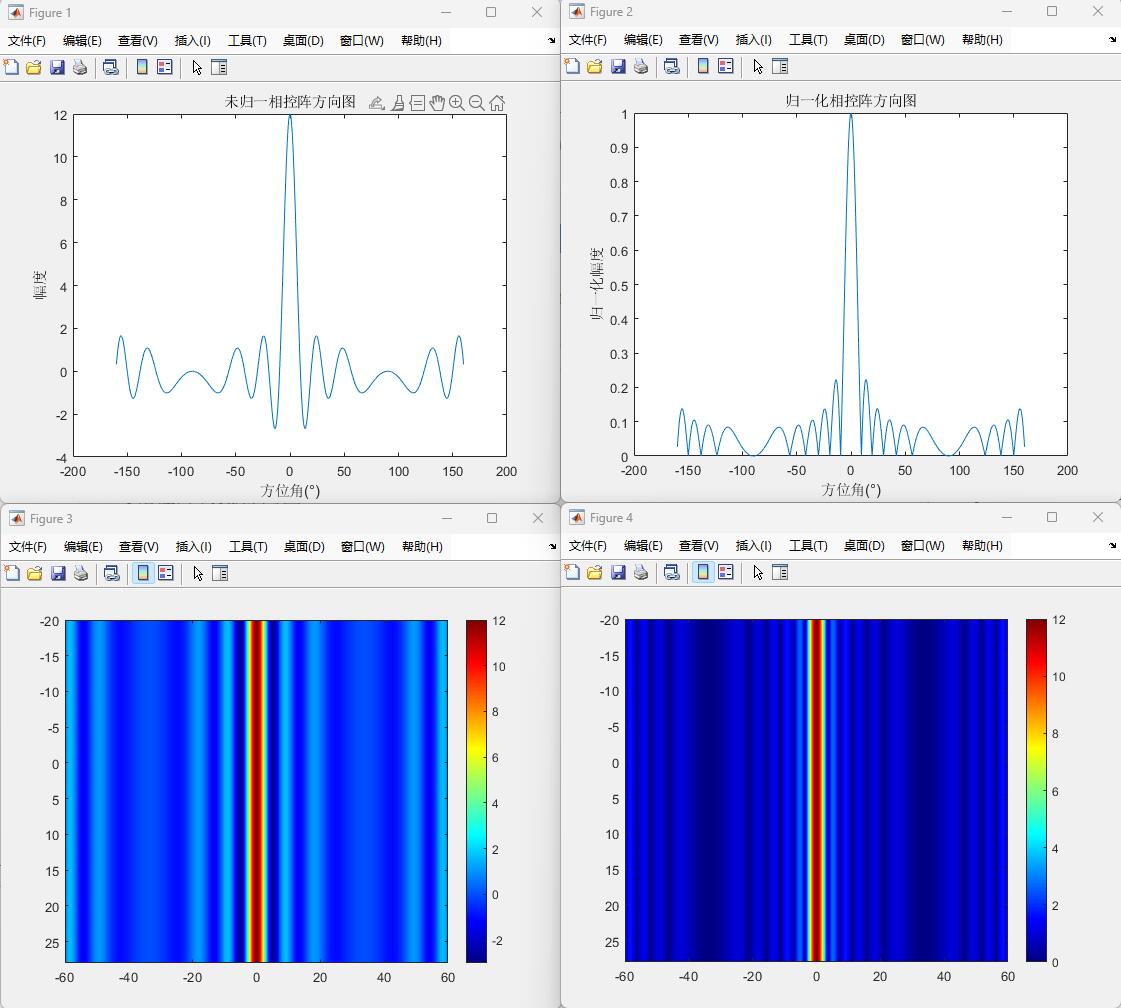
-
一维指向特性:从归一化方向图可见,波束仅在方位角方向形成主瓣和旁瓣,幅度分布与距离无关;
-
波束宽度:12 阵元相控阵的主瓣宽度约为 10°(3dB 带宽),旁瓣电平约为 - 13dB;
-
热力图特征:二维热力图呈现水平条带分布,说明同一幅度等值线覆盖所有距离,验证了距离无关性。
3.2 FDA 方向图关键特征
-
距离 - 方位角耦合:三维波束图呈现明显的 "S" 形,同一方位角下,不同距离的波束幅度不同;
-
二维调控能力 :热力图中幅度等值线为倾斜分布,可通过调节 δ f \delta f δf控制等值线的倾斜角度,实现对特定距离 - 方位角区域的精准覆盖;
-
时变特性 :修改 t t t值后,波束的距离 - 方位角分布会发生变化,这是 FDA 用于抗截获、抗干扰的重要特性。
PDA相控阵
FDA频控阵
3.3 核心差异可视化总结
| 对比维度 | 相控阵 | FDA |
|---|---|---|
| 维度特性 | 一维(仅方位角) | 二维(距离 + 方位角) |
| 等值线分布 | 水平直线 | 倾斜曲线 |
| 时变特性 | 无 | 有(波束随时间演化) |
| 应用场景 | 广域空域扫描 | 精准目标定位、干扰抑制 |
四、工程应用场景与进阶方向
4.1 典型应用场景
-
双站雷达系统:FDA 作为发射机(非均匀布阵),相控阵作为接收机,形成 "点形" 发射 - 接收波束,提升目标定位精度;
-
认知雷达 :通过自适应调整频率增量 δ f \delta f δf,最大化输出信干噪比(SINR),实现杂波与干扰的自适应抑制;
-
射频隐身:利用 FDA 波束的距离依赖性,展宽发射波束宽度、降低峰值功率,减少被无源探测系统截获的概率;
-
定向安全通信:结合方向调制技术,使通信信号仅在特定距离 - 方位角区域正常解调,提升军事通信安全性。
4.2 进阶研究方向
-
波束去耦技术:FDA 存在距离 - 方位角耦合问题,可研究子阵列划分、时变频偏等方法实现解耦;
-
波形优化设计:设计大时间 - 带宽积、恒包络的 FDA-MIMO 雷达波形,兼顾探测精度与工程实现性;
-
自适应波束形成:结合认知雷达技术,实现基于环境感知的 FDA 波束实时优化,应对复杂电磁环境。
五、专栏福利与技术支持
-
代码获取:关注专栏后,私信回复 "FDA 代码",获取完整可运行 MATLAB 代码(含注释优化版);
-
参数调节指南:提供《FDA 核心参数调节与效果对照表》,涵盖 20 + 组参数组合的波束特性分析;
-
答疑服务:专栏读者可在评论区留言,针对具体应用场景(如雷达、通信)获取个性化技术方案。
总结
频控阵(FDA)作为相控阵的扩展技术,通过引入微小频率增量,突破了传统阵列的距离无关性限制,实现了距离 - 方位角二维波束调控,在现代电子系统中具有不可替代的优势。本文通过理论解析 + 代码实战 + 结果对比的方式,帮助读者从本质上理解 FDA 与相控阵的差异,掌握工程实现方法。
随着 5G、雷达探测、安全通信等领域的快速发展,FDA 技术的应用场景将不断拓展,掌握其核心原理与工程实现,将为相关领域的技术研发提供重要支撑。后续专栏将持续更新 FDA-MIMO 融合技术、自适应波束形成、硬件实现方案等进阶内容,敬请关注!