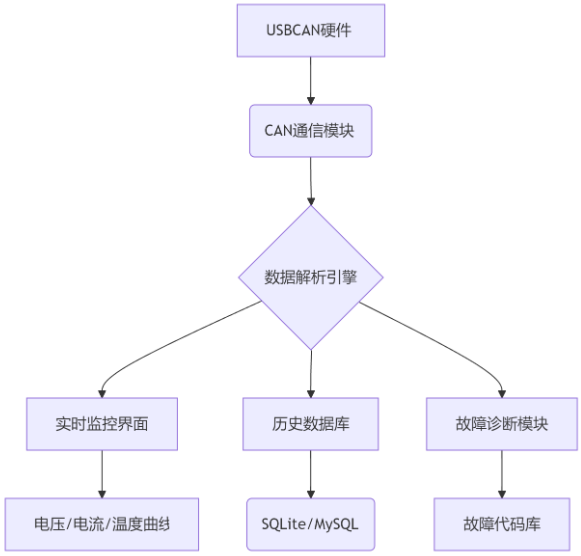
一、系统架构设计
二、核心模块实现
1. CAN通信模块(基于PCAN-Basic)
csharp
using Peak.Can.Basic;
public class BmsCanInterface
{
private TPCANHandle _channel = PCANBasic.PCAN_USBBUS1;
private TPCANBaudrate _baudrate = TPCANBaudrate.PCAN_BAUD_500K;
public bool Initialize()
{
TPCANStatus status = PCANBasic.Initialize(_channel, _baudrate);
if (status != TPCANStatus.PCAN_ERROR_OK)
return false;
// 设置过滤器接收所有BMS相关报文
PCANBasic.SetFilter(PCANBasic.PCAN_FILTER_MASK, 0x0000, 0xFFFF);
return true;
}
public event EventHandler<CanDataFrame> MessageReceived;
public void StartListening()
{
new Thread(() =>
{
TPCANMsg msg = new TPCANMsg();
while(true)
{
TPCANStatus status = PCANBasic.Read(_channel, out msg);
if(status == TPCANStatus.PCAN_ERROR_OK)
MessageReceived?.Invoke(this, new CanDataFrame(msg));
}
}).Start();
}
}
public class CanDataFrame
{
public ushort ID { get; }
public byte[] Data { get; }
public CanDataFrame(TPCANMsg msg)
{
ID = msg.ID;
Data = msg.DATA.Take((int)msg.LEN).ToArray();
}
}2. BMS数据解析引擎
csharp
public class BmsDataParser
{
// 电压解析(示例:0x18FF50E5报文)
public double ParseVoltage(byte[] data)
{
ushort raw = (ushort)(data[0] << 8 | data[1]);
return raw * 0.01; // 假设每字节代表10mV
}
// 温度解析(示例:0x18F00502报文)
public double ParseTemperature(byte[] data, int offset)
{
sbyte raw = (sbyte)data[offset];
return raw + 25; // 假设偏移量25℃
}
// SOC解析(非线性编码)
public double ParseSOC(byte[] data)
{
byte b1 = data[2];
byte b2 = data[3];
if(b1 < 0x20)
return b1 * 0.5; // 0-20%线性区
else
return 10 + (b2 - 0x20) * 0.25; // 20-100%非线性区
}
}3. 实时监控界面(WPF示例)
xml
<!-- 主界面.xaml -->
<Grid>
<TabControl>
<TabItem Header="实时数据">
<DataGrid ItemsSource="{Binding BatteryData}">
<DataGrid.Columns>
<DataGridTextColumn Header="电压(V)" Binding="{Binding Voltage}"/>
<DataGridTextColumn Header="温度(℃)" Binding="{Binding Temp}"/>
</DataGrid.Columns>
</DataGrid>
</TabItem>
<TabItem Header="历史曲线">
<Chart>
<LineSeries ItemsSource="{Binding VoltageHistory}"
IndependentValuePath="Time"
DependentValuePath="Value"/>
</Chart>
</TabItem>
</TabControl>
</Grid>三、关键技术实现
1. 多帧数据重组
csharp
public class MultiFrameBuffer
{
private Dictionary<ushort, byte[]> _buffers = new();
public void AddFrame(ushort id, byte[] data)
{
if (!_buffers.ContainsKey(id))
_buffers[id] = new byte[0];
var buffer = _buffers[id];
Array.Copy(data, 0, buffer, buffer.Length, data.Length);
_buffers[id] = buffer.Concat(data).ToArray();
}
}2. 数据校验机制
csharp
public class DataValidator
{
// LRC校验
public bool ValidateLRC(byte[] data)
{
byte checksum = 0;
foreach(byte b in data)
checksum ^= b;
return checksum == data[data.Length - 1];
}
// 时间戳防重放
public bool CheckTimestamp(uint receivedTs)
{
return (DateTime.Now.Ticks / 10000) - receivedTs < 2000; // 2秒容差
}
}四、数据库设计(SQLite示例)
csharp
public class BmsDbContext : DbContext
{
public DbSet<BatteryRecord> Records { get; set; }
protected override void OnConfiguring(DbContextOptionsBuilder options)
{
options.UseSqlite("Data Source=bms_data.db");
}
}
public class BatteryRecord
{
[PrimaryKey, AutoIncrement]
public int Id { get; set; }
public DateTime Timestamp { get; set; }
public double Voltage { get; set; }
public double Temperature { get; set; }
public byte Soc { get; set; }
}五、异常处理策略
- 总线故障恢复
csharp
public void HandleBusOff()
{
if(PCANBasic.GetStatus(_channel) == TPCANStatus.PCAN_ERROR_BUSOFF)
{
PCANBasic.Reset(_channel);
Thread.Sleep(1000);
Initialize();
}
}- 数据完整性检查
csharp
public bool CheckFrameIntegrity(CanDataFrame frame)
{
if(frame.ID > 0x1FFF) // 过滤非BMS报文
return false;
if(frame.Data.Length != 8) // DLC校验
return false;
return true;
}六、性能优化方案
- 数据缓存策略
csharp
// 使用环形缓冲区存储最新1000条数据
public class CircularBuffer<T>
{
private T[] _buffer;
private int _head;
private int _tail;
public CircularBuffer(int capacity)
{
_buffer = new T[capacity];
_head = 0;
_tail = 0;
}
public void Add(T item)
{
_buffer[_head] = item;
_head = (_head + 1) % _buffer.Length;
if(_head == _tail) _tail = (_tail + 1) % _buffer.Length;
}
}- 硬件加速
csharp
// 启用DMA传输模式
PCANBasic.SetBusOutputControl(_channel, PCANBasic.PCAN_BUS_OFF);
PCANBasic.SetBusOutputControl(_channel, PCANBasic.PCAN_BUS_ON);参考源码 基于C#的CAN总线数据解析BMS上位机 www.youwenfan.com/contentcsn/111860.html
七、测试验证流程
- CAN报文模拟
csharp
// 使用CANoe生成测试报文
var testMsg = new CanDataFrame
{
ID = 0x18FF50E5,
Data = new byte[] {0x00,0x9C,0x4E,0x20,0xFF,0x00,0x33,0x71} // 模拟绝缘故障
};
canInterface.SendMessage(testMsg);- 压力测试
csharp
// 模拟1000条/秒数据流
Parallel.For(0, 1000, i =>
{
canInterface.SendMessage(testMsg);
Thread.Sleep(1);
});八、扩展功能建议
- OTA升级模块
csharp
public class FirmwareUpdater
{
public void CheckUpdate()
{
var response = SendCommand(0x18FEF100, new byte[]{0x01});
if(response.Data[0] == 0xAA)
DownloadFirmware(response.Data.Skip(1).ToArray());
}
}- 三维可视化
csharp
// 使用Helix Toolkit渲染电池模组
var model = new BatteryPackVisual3D();
model.Initialize(batteryCells.Select(cell =>
new CylinderVisual3D { Radius = 20, Height = 65, Fill = new SolidColorBrush(Colors.Green) }));该方案整合了CAN通信、数据解析、界面交互等关键技术,实际开发中需根据具体BMS协议(如ISO 15118-7、GB/T 27930)调整解析逻辑。建议使用Vector CANoe或PCAN-View进行协议验证,通过单元测试确保数据解析准确性。