随着人形机器人技术向实用化、智能化加速演进,如何高效、自然地实现复杂动作的交互表达与执行 ,已成为人形机器人研发中的核心挑战之一。在众多技术探索路径中,基于动作捕捉的机器人动作训练方案,凭借数据采集的真实性与转化执行的高效性,为解决这一难题提供了切实可行的技术路径。

机器人训练动作数据转化平台,依托"采集-修正-转化"的系统化流程,通过动作捕捉与数据标准化处理,生成机器人可直接识别与执行的动作指令文件。
这一模式显著降低了对复杂动作进行手工编程的技术门槛与时间成本,使开发团队能够将更多资源投入到机器人运动稳定性、平衡控制等算法的优化上,从而系统性地提升整体性能,实现机器人更自由的交互表达。
通过采集人类动作数据,并借助机器人训练动作数据转化平台进行数据修正与转化,可生成适用于机器人强化学习的高质量数据集。这些来源于人类实际动作的数据为机器人的动作学习提供了可靠示范,在双足平衡、动态步态等复杂任务中展现出显著应用价值。

数据采集的精度直接决定机器人动作的执行效果,方案适配标准版 27节点一体式动捕设备VDSuitFull 与旗舰版31节点动捕设备DreamsCapX1。
标准版设备捕捉效果
旗舰版设备捕捉效果
两款设备均搭载大量程IMU惯性测量单元传感器,覆盖人体躯干、头部、四肢以及手部与手指等关键节点,可实时采集人体各肢段的加速度与角速度数据,通过专业算法处理精准还原人体运动姿态,为机器人动作学习提供可靠性的数据来源。

机器人训练动作数据转化平台支持对原始动捕数据进行精细化修正,适配宇树G1机器人的强化学习训练流程,可大幅降低数据预处理成本:
1、数据精度保障
支持对原始动捕MD数据进行精细化修正,有效消除偏差与噪点,为机器人动作自然流畅提供基础保障,同时降低算法训练成本;
2、硬件兼容适配
针对性兼容宇树G1人形机器人,高效完成动作数据重定向与转化,提升技术落地部署效率;
3、数据实用输出
支持导出符合行业标准的CSV格式动作数据集,可直接对接主流机器人仿真平台的强化学习训练流程,显著降低数据预处理成本。

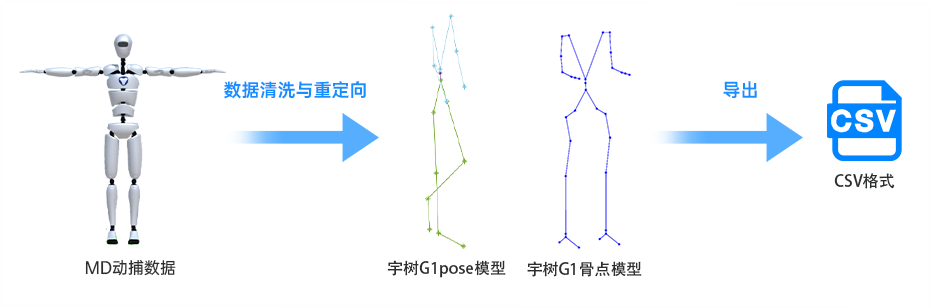
为确保数据转化的高效性与可靠性,方案构建了标准化的动作数据采集转化流程:
多源动作接入
支持MD格式动捕数据无缝加载与预览,实现与宇树G1动作系统的跨格式兼容;
精准重定向
搭载针对宇树G1机械结构优化的智能重定向算法,自动匹配关节参数;
可视化精调
提供关节角度修正、运动轨迹平滑、平衡状态优化等全链路可视化调节功能,实时校验动作是否符合机器人关节物理限制;
标准化输出
导出包含关节角度序列的CSV格式文件,无缝衔接机器人开发全流程。

为进一步降低开发门槛,可提供多个类别高质量动作数据包,累计已构建超过100组核心数据集,涵盖才艺类、功能类、日常类和节日热点类四大场景。
此外,可面向特定应用场景与需求,提供定制化动作数据采集与转化服务。同时支持对客户自采数据进行专业的清洗、算法重定向与格式转化服务。
开发人员无需从零编写代码,可直接按需调用数据,快速进入机器人的强化学习,大幅压缩训练周期,提升开发效率,满足多场景演示、科研探索与应用开发等多样化需求。
随着动作捕捉精度的持续提升与数据转化算法的迭代优化,基于人类动作数据的机器人学习方法,有望在更多复杂应用场景中发挥核心作用。未来,这一技术路径将持续推动人形机器人运动控制技术向更自然、更高效、更可靠的方向发展,为机器人产业的规模化落地提供坚实技术支撑。