一、效果演示
L298N驱动42步进电机
二、准备阶段
(stm32单片机,L298N模块,42步进电机,螺丝刀,杜邦线,串口工具)
1)主控:stm32f103c8t6
2)驱动器 : L298N
3)电机:42步进电机
4)驱动方式:4拍驱动
三、原理介绍和接线描述
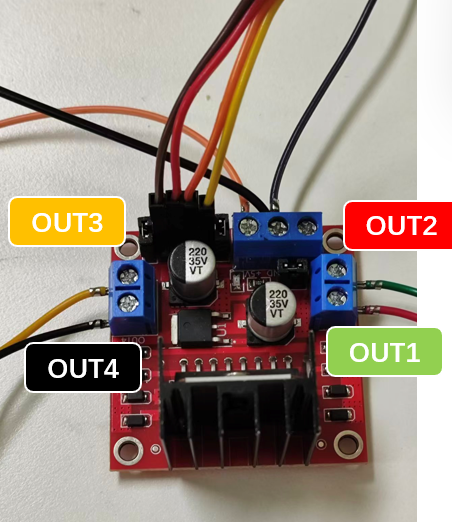
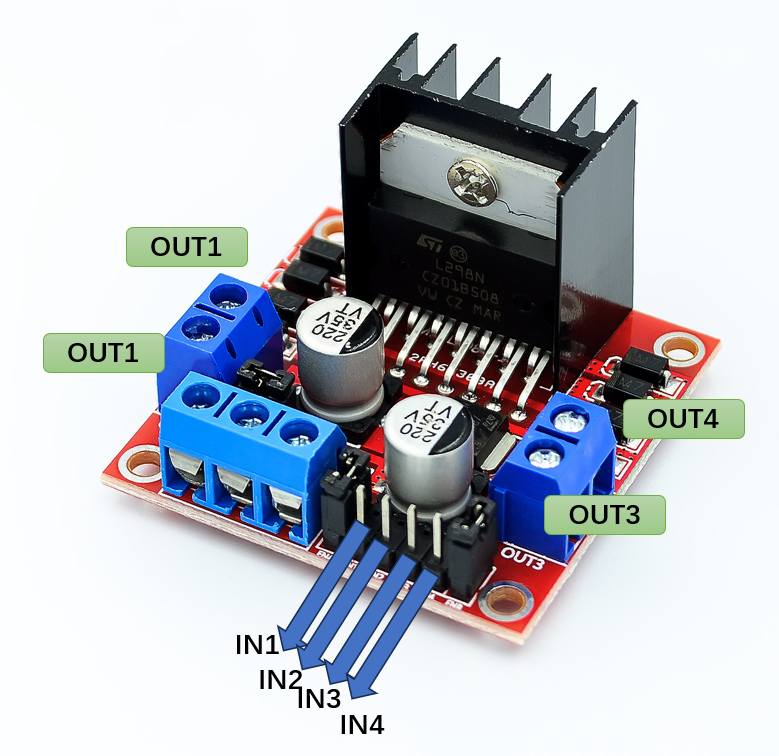
1)L298N的输入和输出
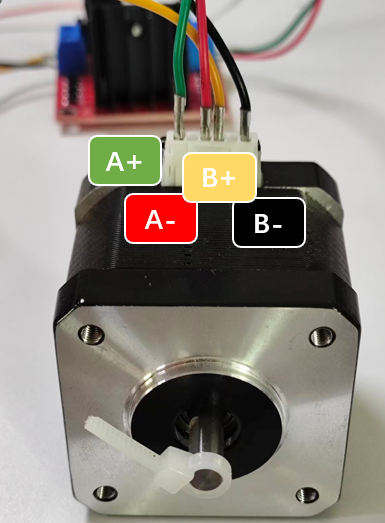
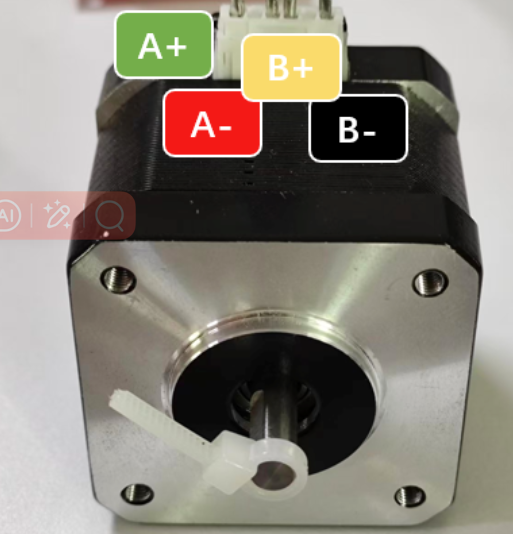
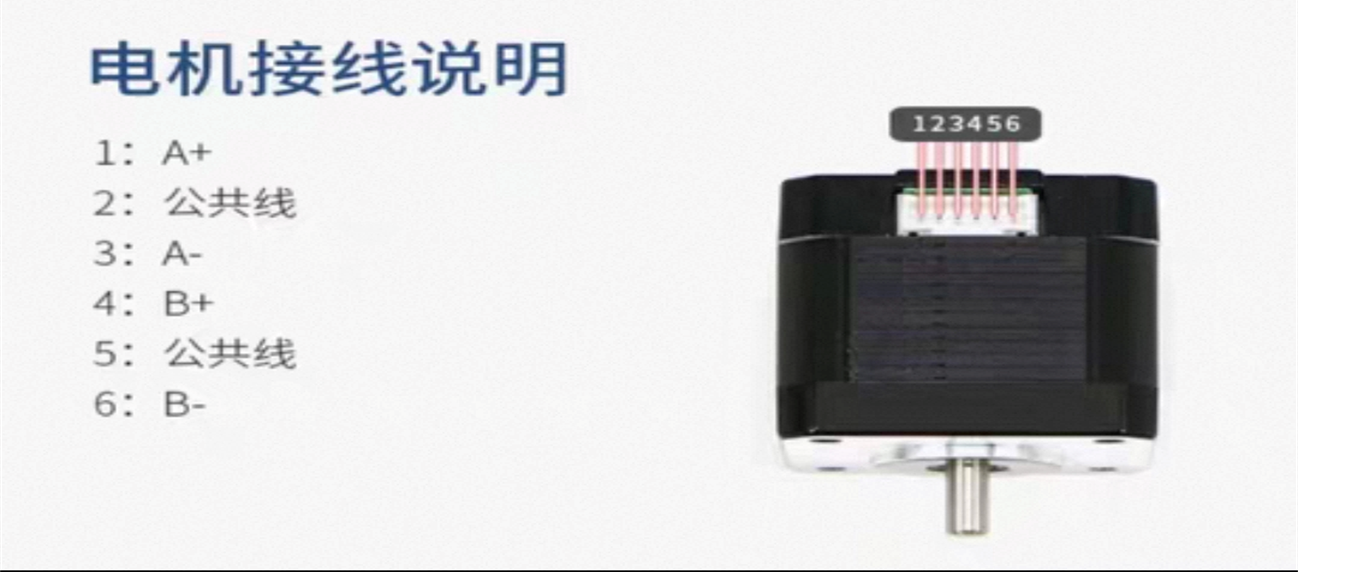
2)步进电机线序【我用的电机是淘宝买的,商家提供的手册描述了线序】
3)步进电机4拍驱动
概念扫盲:
拍数 ------转子转动一周,定子绕组通电的次数,以两相电机为例,有两相四拍运行方式即**(A+)---(B+)---(A-)---(B-)**,
步距角 ------步进电机接收到一个脉冲信号后,驱动电机按设定的方向转动的一个固定角度。如两相四线步进电机的基本步距角是1.8°,即一个脉冲走1.8°。
细分 -----同时,为了减弱或消除步进电机的低频振动开发了细分驱动技术。细分后电机运行时的实际步距角是基本步距角的几分之一,微步即1/4-step、1/8-step、1/16-step等。 比如,两相步进电机的基本步距角是1.8°,如果没有细分,则是200个脉冲走一圈360°。细分是通过驱动器靠精确控制电机的相电流所产生的,如果是10细分,则发一个脉冲电机走0.18°,即2000个脉冲走一圈360°,电机的精度能否达到或接近0.18°,还取决于细分驱动器的细分电流控制精度等其它因素。
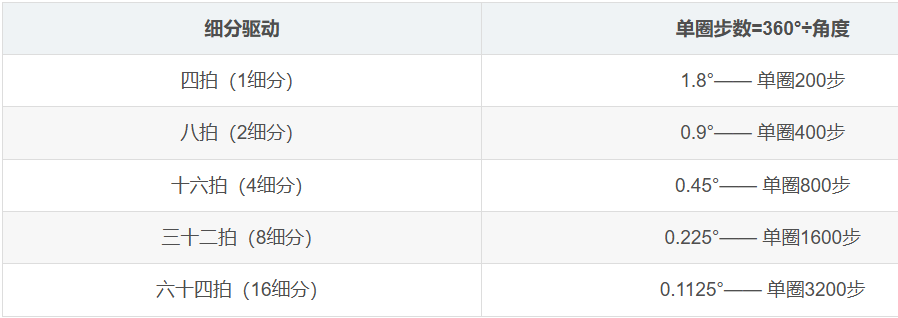
结论1:用四拍驱动,执行一个周期(A+)---(B+)---(A-)---(B-),则电机运行1.8°,运行200个周期,电机旋转360度,即1圈
4)根据 "L298N特性" 和 "步进电机线序" 和"步进电机4拍驱动特性",分析怎样配置mcu的输出 ****
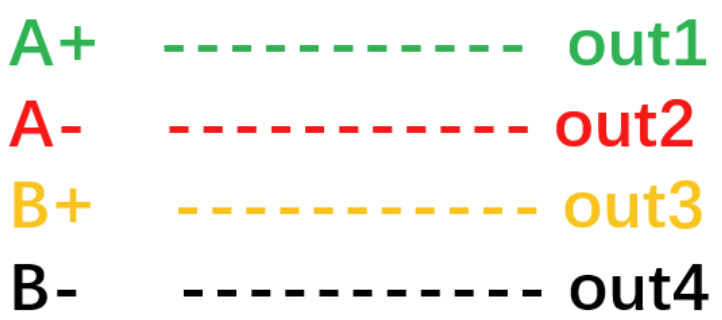
这是对接线图的简化:
步进电机4根线:A+,A-,B+,B-
L298N4个输出:out1,out2,out3,out4
按照这个图片中的顺序连接;
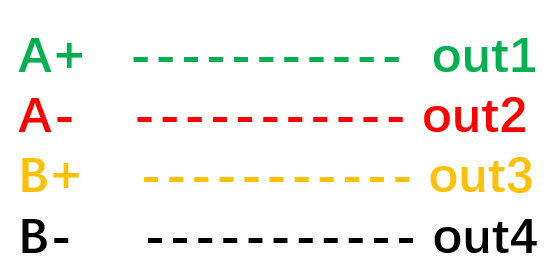
为什么按这个顺序连接?-----因为提供4拍的时序分析出来的

这个图是4拍的时序,
A+连上一个L298N的输出(out1),
A-连上一个L298N的输出(out2),
B+连上一个L298N的输出(out3),
B-连上一个L298N的输出(out4),
//这样写方便写程序(如果用其他接线方法,就要根据时序写相应的程序)。
四、代码
我使用的这4个引脚:
PA10(IN1),
PA11(IN2),
PA12(IN3),
PA15(IN4),
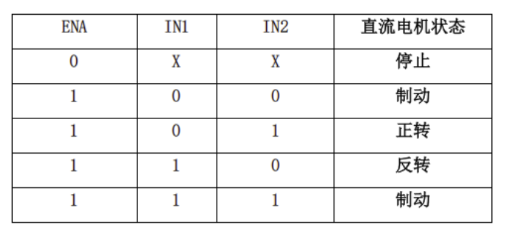
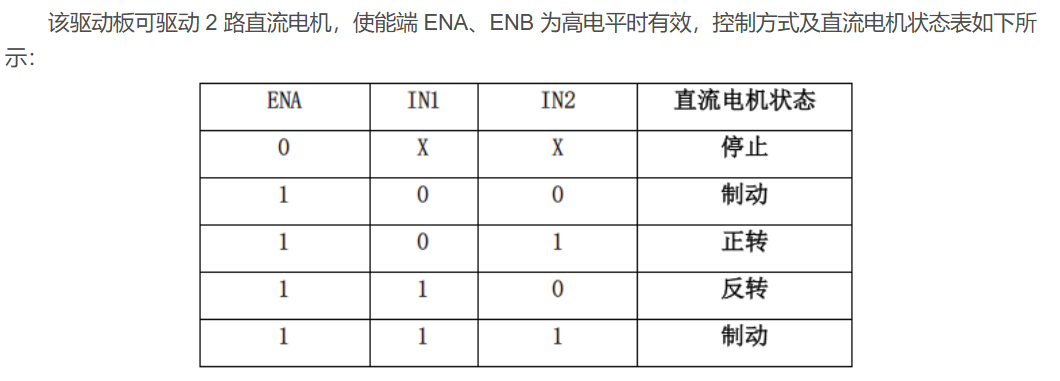
L298N的情况是:
IN1 高 && IN2低 --->out1输出高
IN1 低 && IN2高 --->out2输出高
IN3 高 && IN4低 --->out3输出高
IN3 低 && IN4高 --->out4输出高
由于连接线序为
所以我们根据4拍的时序(A+)---(B+)---(A-)---(B-)得出:L298N的输入信号(即mcu的输出信号,一个周期的规律入如下)

通过宏定义了A1,A2,B1,B2的接口
c
#define GPIO_PORTA_BASE GPIOA
#define A1(state) (state>0) ? HAL_GPIO_WritePin(GPIO_PORTA_BASE, GPIO_PIN_10, GPIO_PIN_SET) :HAL_GPIO_WritePin(GPIO_PORTA_BASE, GPIO_PIN_10, GPIO_PIN_RESET) //A+
#define B1(state) (state>0) ? HAL_GPIO_WritePin(GPIO_PORTA_BASE, GPIO_PIN_11, GPIO_PIN_SET) :HAL_GPIO_WritePin(GPIO_PORTA_BASE, GPIO_PIN_11, GPIO_PIN_RESET) //B+
#define A2(state) (state>0) ? HAL_GPIO_WritePin(GPIO_PORTA_BASE, GPIO_PIN_12, GPIO_PIN_SET) :HAL_GPIO_WritePin(GPIO_PORTA_BASE, GPIO_PIN_12, GPIO_PIN_RESET) //A-
#define B2(state) (state>0) ? HAL_GPIO_WritePin(GPIO_PORTA_BASE, GPIO_PIN_15, GPIO_PIN_SET) :HAL_GPIO_WritePin(GPIO_PORTA_BASE, GPIO_PIN_15, GPIO_PIN_RESET) //B-通过逻辑实现4拍和正反转
c
int timeout_ms = 7;
void SetMotor_Four_Motor0(uint8_t Direction)
{
static uint8_t i = 0;
if(Direction>0) //顺序
{
switch(i)
{
case 0:
{
A1(1);B1(0);A2(0);B2(0);
HAL_Delay(timeout_ms);
break;
}
case 1:
{
A1(0);B1(1);A2(0);B2(0);
HAL_Delay(timeout_ms);
break;
}
case 2:
{
A1(0);B1(0);A2(1);B2(0);
HAL_Delay(timeout_ms);
break;
}
case 3:
{
A1(0);B1(0);A2(0);B2(1);
HAL_Delay(timeout_ms);
break;
}
}
}
else //倒序
{
switch(i)
{
case 3:
{
A1(1);B1(0);A2(0);B2(0);
HAL_Delay(timeout_ms);
break;
}
case 2:
{
A1(0);B1(1);A2(0);B2(0);
HAL_Delay(timeout_ms);
break;
}
case 1:
{
A1(0);B1(0);A2(1);B2(0);
HAL_Delay(timeout_ms);
break;
}
case 0:
{
A1(0);B1(0);A2(0);B2(1);
HAL_Delay(timeout_ms);
break;
}
}
}
i++;
if(i>3)
i=0;
}