摘要
在现代机电能量转换系统中,功率因数(Power Factor, PF)不仅是衡量电能利用效率的关键指标,更是决定驱动系统成本、体积及热管理设计的核心参数。随着全球工业电气化进程的加速,特别是电动汽车(EV)与精密工业自动化的普及,永磁同步电机(PMSM)凭借其高功率密度和高效率成为了主流选择。然而,PMSM的功率因数特性具有高度非线性,受到电磁设计参数与控制策略的深度耦合影响。本文旨在提供一份详尽的研究报告,从物理本源出发,系统性地阐述电机功率因数的定义与物理意义,建立PMSM在d−qd-qd−q坐标系下的功率因数数学模型,并深入探讨通过先进控制算法(如MTPA、UPF、弱磁控制)与本体电磁设计优化(如绕组拓扑、转子结构、气隙设计)来提升功率因数的路径。报告最终将视野扩展至系统级优化,分析有源前端(AFE)技术在电网侧功率因数校正中的作用及其与电机本体设计的权衡。
第一章 电机功率因数的物理本质与工程意义
1.1 功率因数的基本定义与物理图像
在交流(AC)电路理论中,功率因数定义为有功功率(Active Power, PPP)与视在功率(Apparent Power, SSS)的比值,其数学表达为电压与电流基波相位差 ϕ\phiϕ 的余弦值:
PF=PS=cosϕ PF = \frac{P}{S} = \cos \phi PF=SP=cosϕ
其中,视在功率 SSS 由有功功率 PPP 和无功功率(Reactive Power, QQQ)矢量合成:
S=P2+Q2 S = \sqrt{P^2 + Q^2} S=P2+Q2
在电机驱动系统中,这三个物理量具有明确的物理对应关系:
- 有功功率 (PPP):代表电机轴端输出的机械功率加上系统的电阻损耗(铜损、铁损等)。这是真正用于"做功"的能量流,直接对应于电机的转矩输出和转速。
- 无功功率 (QQQ):代表在电源与电机磁场之间往复振荡的能量。在电机中,无功功率主要用于建立和维持气隙磁场(励磁)。对于感性负载(如电机),电流通常滞后于电压,消耗滞后无功。
- 视在功率 (SSS):代表逆变器(Inverter)或电网必须提供的总容量。变频器、电缆和开关器件必须根据视在功率(即总电流幅值)进行额定设计,而非仅仅根据有功功率。
物理隐喻与实质:
常引用的"啤酒与泡沫"的比喻虽然直观,但在高性能电机控制中显得过于粗糙。更深层的物理实质是能量的去耦与交换。功率因数低意味着为了传输同样的有功能量,系统必须承载更大的电流分量,这些"多余"的电流分量不参与平均能量传输,却在电阻性元件上产生实实在在的热损耗(I2RI^2RI2R),并占据了逆变器的电流裕量。
1.2 异步电机与同步电机的功率因数差异
理解PMSM功率因数特性的前提,是将其与传统的感应电机(Induction Motor, IM)进行对比。
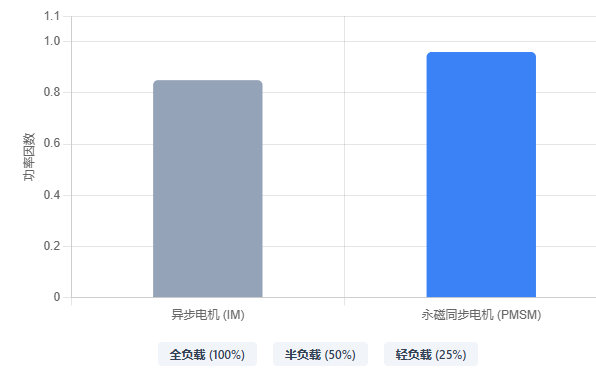
- 感应电机(IM) :其转子磁场必须由定子侧的励磁电流感应产生。这意味着电网或逆变器必须始终提供滞后的无功电流分量(idi_did)来建立磁场。因此,感应电机的功率因数天然滞后且永远小于1,通常在满载时为0.8-0.9,轻载时急剧下降。
- 永磁同步电机(PMSM) :其转子磁场主要由永磁体(PM)提供。理论上,如果永磁体产生的磁通足以平衡负载所需的反电势,定子就不需要提供励磁分量。这使得PMSM具有独特的功率因数可调性。通过控制定子电流矢量,PMSM可以运行在滞后、单位功率因数(PF=1),甚至超前功率因数状态。
1.3 低功率因数的系统级代价
在电动汽车和工业驱动应用中,忽视功率因数优化将带来显著的工程与经济代价:
| 影响维度 | 具体后果 | 物理机制 |
|---|---|---|
| 逆变器容量 | 成本增加、体积增大 | 逆变器容量由视在功率 SSS 决定。若电机 PF=0.7PF=0.7PF=0.7,为输出相同的机械功率,逆变器额定电流需增加42%。 |
| 系统效率 | 铜损增加、热管理压力 | 线路损耗与电流平方成正比 (Ploss∝I2P_{loss} \propto I^2Ploss∝I2)。低PF导致定子电流 IsI_sIs 增大,显著增加 I2RI^2RI2R 损耗。 |
| 电网侧惩罚 | 运营成本上升 | 工业用电中,低功率因数会招致电力公司的罚款,且需配置额外的无功补偿装置。 |
| 弱磁能力 | 高速性能受限 | 低PF往往伴随着较大的电感压降,这会使得电机端电压更快达到逆变器电压极限,限制高速功率输出。 |
第二章 永磁同步电机功率因数的数学建模
为了定量分析和优化PMSM的功率因数,必须建立其在同步旋转坐标系(d−qd-qd−q 轴)下的数学模型。这种变换将三相静止坐标系下的交流量转化为随转子旋转的直流量,极大简化了控制分析。
2.1 d−qd-qd−q 轴电压方程与相量图
在 d−qd-qd−q 坐标系下,假设忽略铁损和磁路饱和的非线性影响,稳态电压方程为:
vd=Rsid−ωeLqiq v_d = R_s i_d - \omega_e L_q i_q vd=Rsid−ωeLqiq
vq=Rsiq+ωeLdid+ωeψpm v_q = R_s i_q + \omega_e L_d i_d + \omega_e \psi_{pm} vq=Rsiq+ωeLdid+ωeψpm
其中:
- vd,vqv_d, v_qvd,vq:定子电压的 d,qd, qd,q 轴分量。
- id,iqi_d, i_qid,iq:定子电流的 d,qd, qd,q 轴分量。
- Ld,LqL_d, L_qLd,Lq:d,qd, qd,q 轴同步电感。
- RsR_sRs:定子电阻。
- ωe\omega_eωe:电角速度。
- ψpm\psi_{pm}ψpm:永磁体磁链。
相量关系:
功率因数角 ϕ\phiϕ 是电压矢量 v\boldsymbol{v}v 与电流矢量 i\boldsymbol{i}i 之间的夹角。在高速大功率电机分析中,通常忽略定子电阻 RsR_sRs 的压降,此时电压方程简化为:
vd≈−ωeLqiq v_d \approx -\omega_e L_q i_q vd≈−ωeLqiq
vq≈ωe(Ldid+ψpm) v_q \approx \omega_e (L_d i_d + \psi_{pm}) vq≈ωe(Ldid+ψpm)
此时,反电势 E0=ωeψpmE_0 = \omega_e \psi_{pm}E0=ωeψpm 位于 qqq 轴。电枢反应产生的电压降主要体现在电感项上。
2.2 功率因数的解析表达式
功率因数 PF=cosϕPF = \cos \phiPF=cosϕ 可以通过电压矢量角 δ\deltaδ(电压超前 qqq 轴的角度)和电流矢量角 γ\gammaγ(电流超前 qqq 轴的角度,注意定义方向)导出。更直接的方法是利用 d−qd-qd−q 分量计算:
PF=PS=32(vdid+vqiq)32vd2+vq2id2+iq2 PF = \frac{P}{S} = \frac{\frac{3}{2}(v_d i_d + v_q i_q)}{\frac{3}{2} \sqrt{v_d^2 + v_q^2} \sqrt{i_d^2 + i_q^2}} PF=SP=23vd2+vq2 id2+iq2 23(vdid+vqiq)
将简化的电压方程代入,可得 PMSM 功率因数的本征表达式:
cosϕ=−ωeLqiq⋅id+ωe(Ldid+ψpm)⋅iq(ωeLqiq)2+ωe(Ldid+ψpm)2⋅id2+iq2 \cos \phi = \frac{-\omega_e L_q i_q \cdot i_d + \omega_e (L_d i_d + \psi_{pm}) \cdot i_q}{\sqrt{(\omega_e L_q i_q)^2 + \\omega_e (L_d i_d + \\psi_{pm})^2} \cdot \sqrt{i_d^2 + i_q^2}} cosϕ=(ωeLqiq)2+ωe(Ldid+ψpm)2 ⋅id2+iq2 −ωeLqiq⋅id+ωe(Ldid+ψpm)⋅iq
化简分子项(有功部分),idi_did 的项在分子中相互抵消(若 Ld=LqL_d=L_qLd=Lq),但对于凸极电机(IPM,Ld≠LqL_d \neq L_qLd=Lq),磁阻转矩项会保留。
更直观的角域表达形式为:
ϕ=arctan(vdvq)−arctan(idiq) \phi = \arctan\left(\frac{v_d}{v_q}\right) - \arctan\left(\frac{i_d}{i_q}\right) ϕ=arctan(vqvd)−arctan(iqid)
代入电压方程(忽略电阻):
ϕ≈arctan(−LqiqLdid+ψpm)−arctan(idiq) \phi \approx \arctan\left(\frac{-L_q i_q}{L_d i_d + \psi_{pm}}\right) - \arctan\left(\frac{i_d}{i_q}\right) ϕ≈arctan(Ldid+ψpm−Lqiq)−arctan(iqid)
2.3 影响功率因数的关键变量敏感性分析
从上述解析式中,我们可以提取出决定PMSM功率因数的三个核心要素:
- 电感凸极率 (ξ=Lq/Ld\xi = L_q / L_dξ=Lq/Ld):
对于内置式永磁电机(IPM),通常 Lq>LdL_q > L_dLq>Ld。较大的 qqq 轴电感会产生巨大的 ωeLqiq\omega_e L_q i_qωeLqiq 电压降,这直接导致 vdv_dvd 增大(负向)。vdv_dvd 的增大会使电压矢量 v\boldsymbol{v}v 向滞后方向大幅偏转,从而增大电压与电流的夹角,导致功率因数下降。这是高转矩密度电机(如Vernier电机)通常功率因数较低的根本原因。
- 特征电流与弱磁深度 (ψpm/Ld\psi_{pm} / L_dψpm/Ld):
特征电流 Ich=ψpm/LdI_{ch} = \psi_{pm} / L_dIch=ψpm/Ld 是衡量电机抗去磁能力和弱磁范围的关键。当电机运行在深层弱磁区(高速)时,需要施加巨大的负 idi_did 来抵消 ψpm\psi_{pm}ψpm。此时,电流矢量 i\boldsymbol{i}i 几乎完全倒向负 ddd 轴(纯去磁分量),而有功电流 iqi_qiq 占比减小,导致功率因数急剧恶化。
- 反电势系数 (kek_eke):
较高的反电势 E0E_0E0 在基速以下有利于提高功率因数,因为它主导了 qqq 轴电压,使得电压矢量更接近 qqq 轴(即接近有功轴)。然而,过高的反电势会导致电机过早进入弱磁区,从而在高速段牺牲功率因数。
第三章 功率因数优化的控制策略
在电机本体设计确定的情况下,控制策略是调节运行点功率因数的唯一手段。不同的控制目标(最大转矩、最高效率、最小容量)对应着 id−iqi_d-i_qid−iq 平面上不同的电流轨迹,从而产生截然不同的功率因数特性。
3.1 基础控制策略:id=0i_d = 0id=0 控制
对于表贴式永磁电机(SPM),由于 Ld≈LqL_d \approx L_qLd≈Lq,没有磁阻转矩。最简单的控制策略是令 id=0i_d = 0id=0,全部电流用于产生转矩(iqi_qiq)。
- PF特性 :在 id=0i_d=0id=0 时,电压方程简化为 vd=−ωLqiqv_d = -\omega L_q i_qvd=−ωLqiq,vq=ωψpmv_q = \omega \psi_{pm}vq=ωψpm。此时功率因数角 tanϕ=vd/vq=−Lqiq/ψpm\tan \phi = v_d / v_q = -L_q i_q / \psi_{pm}tanϕ=vd/vq=−Lqiq/ψpm。
- 局限 :随着负载电流 iqi_qiq 增加,tanϕ\tan \phitanϕ 增大,功率因数单调下降。对于电感较大的电机,满载PF可能很低。
3.2 效率最优策略:MTPA(最大转矩电流比)
对于IPM电机,为了利用磁阻转矩,必须施加负的 idi_did。MTPA控制轨迹是连接不同转矩圆与恒转矩双曲线切点的轨迹。
- PF特性 :MTPA追求的是单位电流产生的转矩最大化(Nm/ANm/ANm/A),而非单位视在功率产生的有功最大化(W/VAW/VAW/VA)。在MTPA轨迹上,随着转矩增加,idi_did 负向增加。虽然利用了磁阻转矩,但较大的 idi_did 分量增加了视在功率中的无功部分。
- 结论:MTPA通常能获得较好的功率因数(0.85-0.95),但并非理论最大值。它是在铜损最小化和转矩最大化之间的权衡,而非PF最大化。
3.3 逆变器容量最优策略:UPF(单位功率因数)控制
UPF控制旨在强制电压矢量与电流矢量同相(ϕ=0\phi = 0ϕ=0),从而使逆变器的容量利用率达到100%。
-
实现机制 :控制器根据实时电压方程解算出所需的 idi_did 值,使得 Q=1.5(vqid−vdiq)=0Q = 1.5(v_q i_d - v_d i_q) = 0Q=1.5(vqid−vdiq)=0。这通常要求电机运行在特定的去磁电流点上,以抵消电感的无功效应。
-
代价分析 :为了强行拉平功率因数,UPF控制往往需要偏离MTPA轨迹。这意味着为了输出同样的转矩,需要的总电流幅值 IsI_sIs 会比MTPA模式下更大。
-
效率惩罚 :IsI_sIs 增大导致铜损(I2RI^2RI2R)增加。因此,UPF是以牺牲电机本体效率(增加发热)为代价,换取逆变器侧容量的节省。
-
应用场景:UPF策略通常仅用于逆变器容量严格受限、或者对电网侧PF有硬性规定且无前端PFC的场合。
3.4 高速区域的功率因数崩塌与MTPV控制
当电机转速超过基速,进入弱磁(Flux Weakening, FW)区域时,电压达到极限椭圆边界。
- 深层弱磁的PF行为 :为了维持电压不超限,必须施加巨大的负 idi_did 去磁。此时,电流矢量主要成分是励磁(去磁)分量,有功分量 iqi_qiq 被压缩。这导致功率因数在高速区迅速下降,甚至降至0.5以下。这种现象被称为"功率因数崩塌"。
- MTPV(最大转矩电压比)优化:在深层弱磁区,传统的弱磁轨迹可能并非最优。MTPV控制寻找电压极限椭圆上的最佳工作点,使得在给定电压极限下输出转矩最大。MTPV轨迹实际上是在电压受限条件下对功率因数的一种间接优化,它避免了过度的去磁电流,使得在高转速下的PF优于简单的弱磁控制。
第四章 电机本体设计的电磁优化(硬件路径)
控制策略只能在物理极限内进行调节,电机本身的本征功率因数能力(Intrinsic Power Factor Capability)是由电磁设计决定的。要从根本上优化PF,必须在设计阶段处理好电感与磁链的平衡。
4.1 转子拓扑结构的选择:SPM vs. IPM
-
表贴式(SPM) :由于永磁体磁导率接近空气,SPM电机的有效气隙很大,导致同步电感 Ld,LqL_d, L_qLd,Lq 很小。
-
PF优势 :小电感意味着电枢反应电压降(ωLI\omega L IωLI)很小,反电势 E0E_0E0 主导电压矢量。因此,SPM电机通常具有极高的本征功率因数,容易接近1。
-
内置式(IPM) :磁体埋入铁芯,有效气隙小,qqq 轴电感 LqL_qLq 大。
-
PF挑战 :大的 LqL_qLq 造成巨大的无功压降。虽然IPM利用了磁阻转矩,但高凸极率(High Saliency)往往伴随着较低的功率因数。
-
优化方向 :在IPM设计中,可以通过多层V型 或磁障设计 来压低 LqL_qLq,或者适当增加永磁体用量以提高 ψpm\psi_{pm}ψpm 占比,从而提升PF。
4.2 气隙长度的权衡艺术
气隙长度(ggg)是影响功率因数最敏感的几何参数之一,且其影响具有反直觉性。
-
感应电机:必须极小化气隙以减小励磁电流,提高PF。
-
PMSM :情况恰恰相反。增大气隙 可以显著减小电枢反应电感(Ld,LqL_d, L_qLd,Lq)。
-
机理 :电感减小 →\rightarrow→ 电枢反应电压降减小 →\rightarrow→ 电压矢量偏转角减小 →\rightarrow→ 功率因数提高。
-
代价 :增大气隙会增加磁阻,为了维持同样的空载气隙磁密 BgB_gBg,必须增加永磁体的厚度或用量,显著增加成本。
-
设计甜点:设计者需在"高PF(大气隙)"与"低磁钢成本(小气隙)"之间寻找平衡。
4.3 绕组形式:分布式 vs. 集中式
-
分布式绕组(DW):产生正弦度好的磁动势(MMF),低次谐波含量少,漏感低。
-
PF表现:由于漏感低,且主电感设计灵活,DW电机通常具有较高的功率因数,适合高性能牵引电机。
-
分数槽集中绕组(FSCW):端部短,铜损低,便于制造。
-
PF陷阱 :FSCW定子磁动势含有极其丰富的空间谐波。这些谐波不产生平均转矩,只产生脉动转矩和巨大的谐波漏电感。谐波漏抗在高速下产生巨大的无功压降,严重拖累功率因数。
-
优化:如果必须使用FSCW(为了紧凑性),需通过极槽配合优化(如选取最大公约数大的配合)、不等齿宽设计或转子极弧优化来削弱特定的MMF谐波,降低漏感。
4.4 抑制漏感的设计细节
漏电感(Leakage Inductance)是功率因数的"隐形杀手",它只消耗无功压降而不做功。
- 槽漏抗优化:深窄槽虽然利于散热,但会显著增加槽漏抗。优化槽口宽度(Slot Opening)和槽型几何,采用半磁性槽楔,可以在不牺牲太多转矩脉动的情况下降低漏抗。
- 端部漏抗:优化端部整形工艺,减小端部长度。
第五章 系统级权衡:电机优化 vs. 有源前端(AFE)
在工程实践中,必须区分电机功率因数 与电网侧功率因数。
5.1 传统的二极管整流与PFC困境
如果驱动器使用传统的六脉波二极管整流桥,无论电机本体的PF多高,电网侧看到的PF都很低(通常 < 0.9),且含有大量谐波。此时,优化电机本体PF对改善电网侧电能质量毫无帮助,仅能减小电机电缆的电流应力。
5.2 有源前端(AFE)技术的解耦作用
AFE(Active Front End)驱动器采用IGBT整流桥,可以主动控制网侧电流为正弦波且与电压同相。
-
解耦效应 :AFE将电网侧PF与电机侧PF完全解耦。网侧可以恒定维持 PF≈1.0PF \approx 1.0PF≈1.0。
-
系统策略:
-
方案A(传统):使用无AFE的驱动器。此时必须花费高昂成本优化电机设计(多用磁钢、大气隙、复杂绕组)以提高电机PF,避免电网罚款和变压器过载。
-
方案B(现代) :使用AFE驱动器。此时电机设计可以完全解放,不再受制于PF目标,转而专注于MTPA效率最优 或功率密度最优。虽然AFE成本较高,但可以通过电机成本的降低(少用磁钢、允许FSCW)和系统能效的提升来抵消。
5.3 成本与效益分析
对于大功率系统,方案B往往更具优势。通过AFE解决PF问题,电机可以设计得具有更高的电感(如Vernier电机或高凸极率IPM),从而利用更大的磁阻转矩,提升转矩密度,减小体积。这种"低电机PF + AFE补偿"的架构正在成为高端工业驱动和电动船舶推进的主流选择。
第六章 结论与建议
永磁同步电机的功率因数优化是一个跨越材料、几何设计、控制算法与系统架构的多维度工程问题。与感应电机不同,PMSM的功率因数并非定值,而是具有极大的设计自由度与运行可变性。
核心结论:
- 物理层面 :电感(特别是 qqq 轴电感和漏感)是限制PMSM高功率因数的主要因素,而反电势是提升基速以下PF的有利因素。
- 控制层面 :MTPA 策略虽然不追求单位功率因数,但提供了最佳的系统能效比,是大多数场景的首选。在逆变器容量受限时,可采用UPF 控制,但需接受电机温升增加的代价。在高速区,MTPV控制是维持PF不崩塌的关键。
- 设计层面 :若追求极致的电机PF(如无AFE应用),应优先选择SPM转子 、分布式绕组 ,并适当增大气隙。若追求转矩密度,可接受较低的本征PF(如使用IPM或FSCW),并通过系统侧手段补偿。
- 系统层面 :随着电力电子成本的下降,采用AFE驱动器 配合高密度(低PF)电机的拓扑结构,在全生命周期成本(TCO)和性能上往往优于单纯追求高PF电机。
工程建议:
- 对于电动汽车牵引:优先采用IPM电机配合MTPA/MTPV控制。不必强求电机本体的高PF,重点在于通过控制算法在全工况下优化效率图谱(Map)。
- 对于工业直驱(如风机、传送带):如果电网侧PF要求严格且不使用AFE,建议采用SPM或低电感设计的IPM,并通过增大有效气隙来提升本征功率因数。
- 对于伺服系统 :动态响应优于PF,通常采用 id=0i_d=0id=0 或 MTPA 控制,PF由直流母线电容和PFC电路在网侧解决。
数据附表
表1:不同设计参数变化对PMSM功率因数的影响趋势
| 参数增加 | 对电感的影响 | 对反电势的影响 | 对功率因数(PF)的影响 | 物理机制 |
|---|---|---|---|---|
| 定子匝数 (NNN) | 显著增加 (∝N2\propto N^2∝N2) | 线性增加 | 下降(高速尤甚) | 电抗压降 ωLI\omega L IωLI 增长快于反电势,导致电压矢量偏转。 |
| 气隙长度 (ggg) | 减小 | 减小 (需更多磁钢补偿) | 上升 | 减小了电枢反应电感,使得电流对磁场的畸变作用减弱。 |
| 槽口宽度 | 减小漏感 | 无明显影响 | 上升 | 降低了槽漏抗压降。 |
| 转子凸极率 (ξ\xiξ) | LqL_qLq 增大 | 无 | 下降 | qqq 轴电感的增大会显著拉大电压与电流的相位差。 |
| 磁钢剩磁 (BrB_rBr) | 略微减小 (磁饱和) | 显著增加 | 上升(基速下) | 增强了主磁场,使反电势在电压构成中占比更高。 |
表2:PMSM三种主流控制策略的综合对比
| 特性维度 | MTPA (最大转矩电流比) | UPF (单位功率因数) | id=0 控制 |
|---|---|---|---|
| 核心目标 | 最小电流产生最大转矩 | 无功功率为零 (Q=0Q=0Q=0) | 线性化转矩控制 |
| 电机本体效率 | 最高(铜损最小) | 较低 (需额外去磁电流,铜损增) | 中等 (SPM高,IPM低) |
| 逆变器容量利用 | 较高 (PF ≈0.9\approx 0.9≈0.9) | 最高(PF = 1.0) | 一般 |
| 功率因数 | 滞后 (0.85 - 0.95) | 单位 (1.0) | 随负载增加而单调下降 |
| 弱磁能力 | 强 | 弱 (需切换策略) | 弱 |
| 典型应用 | EV牵引、高性能伺服 | 并网发电、容量受限驱动 | 低成本风机水泵 |