1)硬件端
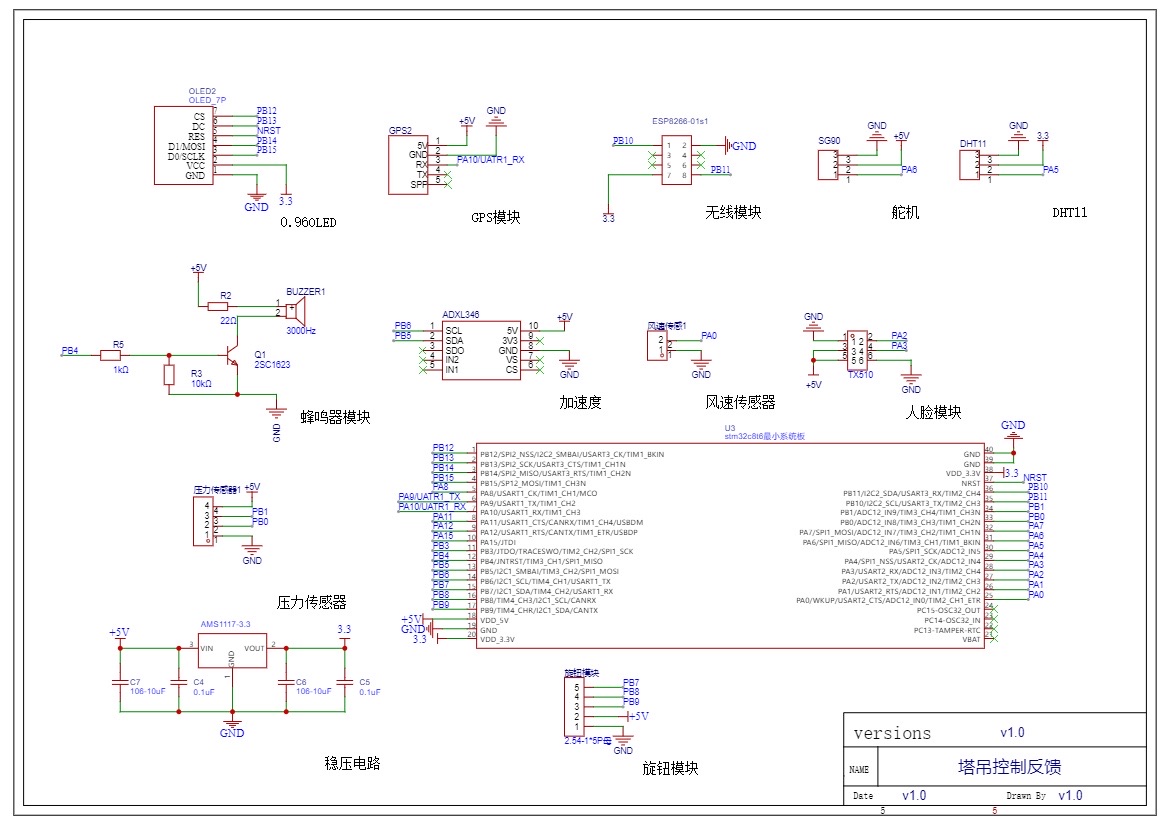
1.ESP8266-01s:使用wifi模块进行联网使用;
2.0.96寸OLED:用于显示的设备的状态,实现实时监测;
3.STM32F103C8T6:用于所有程序的中控和模块数据通信;
4.旋转编码器:用于控制舵机的旋转角度;
5.风速传感器:用于检测环境的风速
6.DHT11:用于检测设备环境的温湿度数据
7.重量检测模块:用检测仪器吊钩是否超重,超过阈值进行报警
8.加速度传感器:用于监测塔吊是否出现剧烈晃动以及反馈倾斜度;
9.舵机:用于模拟监测和控制塔吊的方位并反馈设备;
10.人脸识别:用与设备绑定使用,只能绑定用户才能控制
11.GPS定位:用于设备的获取经纬度信息并传输给app进行地图定位显示
12.蜂鸣器:危险情况下进行危险报警;
13.可以使用按键进行一键报警并反馈给app;
长按按键可以打开手动报警
短按按键可以一键锁机
需要注意GPS模块是否正常,正常状态GPS的状态灯会持续闪烁,若GPS状态灯长亮,则需要在户外获取卫星定位,否则不会有经纬度产生
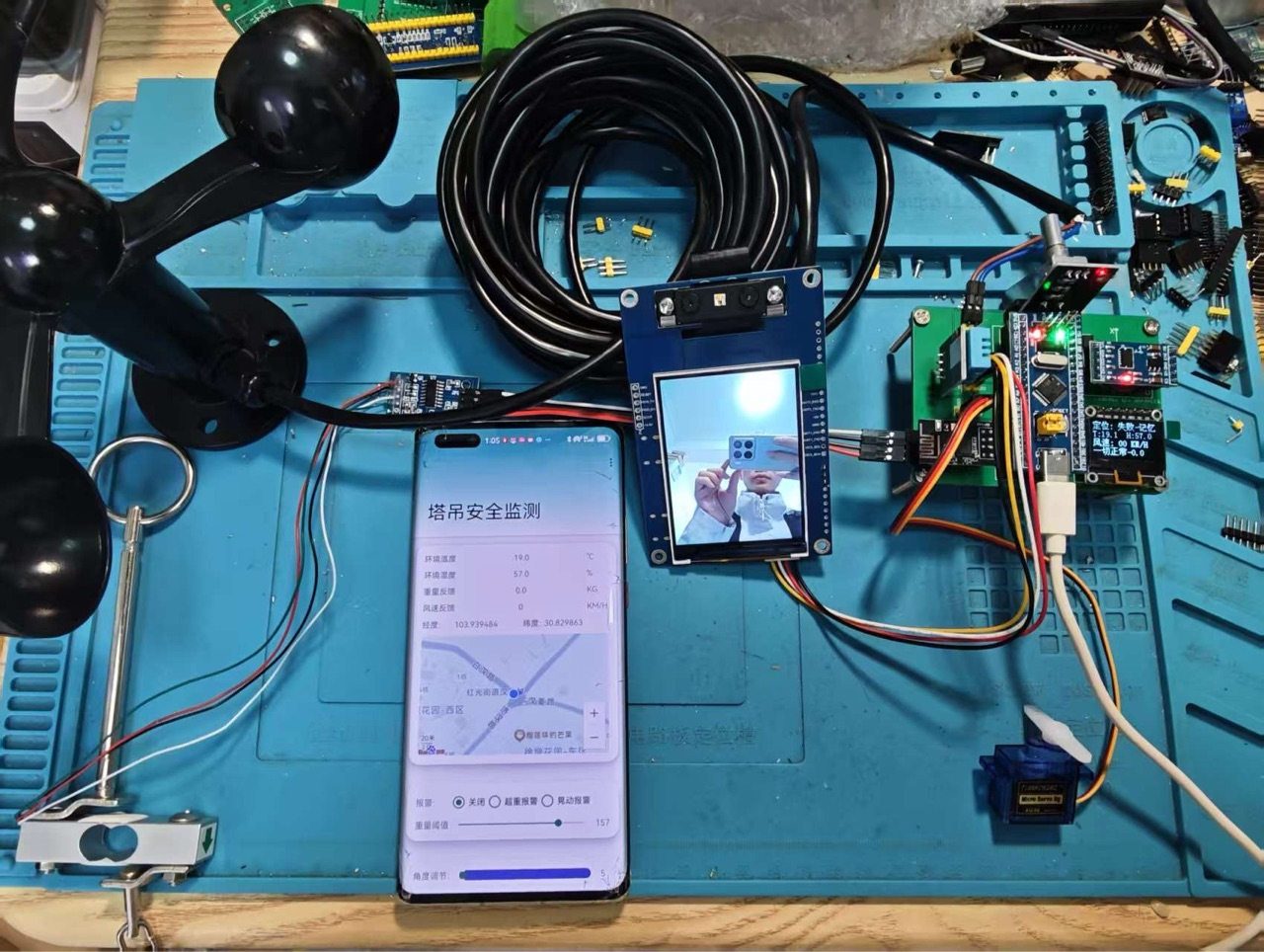
(2)APP端
1.使用MQTT协议与设备进行信息交互;
2.可采集到底层设备数据并且展示到界面UI;
3.可以控制和监测到塔吊的方位;
4.可以设备的超重阈值数据
5.当监测到剧烈晃动时可以进行app报警;
6.历史数据可查: 晃动报警,吊重超载报警
7.使用sqlite数库据进行报警数据统计并可以进行查看
8.可以获取到设备的定位,并进行地图显示
(3)云平台使用
只是链接各个设备使用,采用MQTT即时通讯;