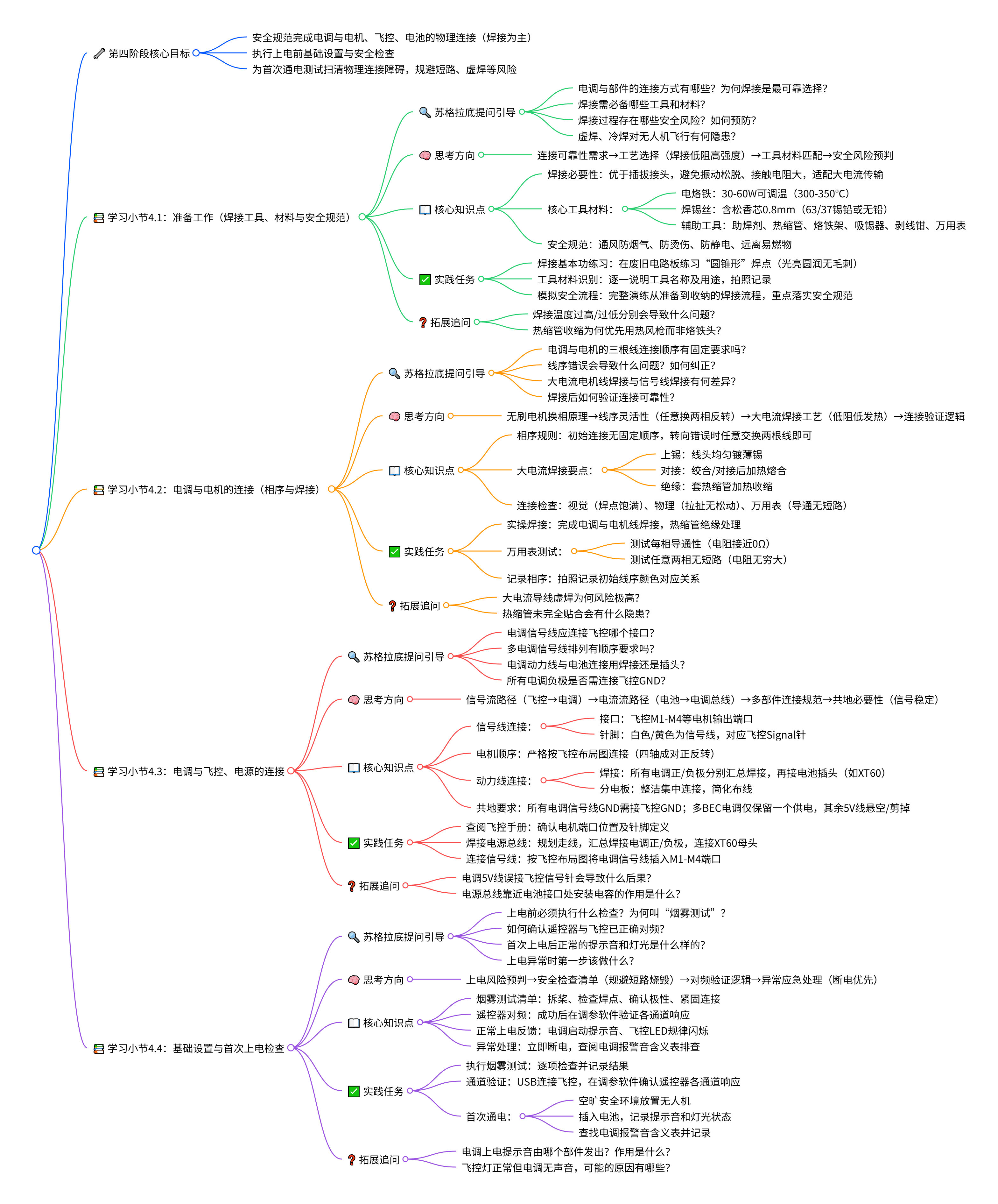
第四阶段:安装、焊接与基础设置(第18-21天)
核心目标:将理论转化为实践,安全、规范地完成电调与电机、飞控、电池的物理连接与焊接,并完成上电前的基础设置,为首次通电测试做好准备。
| 学习小节 | 苏格拉底提问引导 | 思考方向 | 核心知识点(通俗易懂版) | 实践任务 | 拓展追问 |
|---|---|---|---|---|---|
| 4.1 准备工作:焊接工具、材料与安全规范 | 1. 要将电调、电机、飞控的导线可靠地连接起来,有哪些方法?为什么焊接是最可靠的选择? 2. 焊接需要哪些基本工具和材料? 3. 焊接过程中有哪些安全风险?如何预防? 4. 焊接质量不好(如虚焊、冷焊)会对无人机飞行造成什么隐患? | 从"连接可靠性需求→工艺选择→工具准备→风险预防"进行推导。焊接能提供低电阻、高强度的永久连接,是航模电子设备连接的首选。 | 1. 焊接的必要性 :插拔接头虽然方便,但存在振动松脱、接触电阻大的风险。焊接能形成稳固的金属连接,确保大电流传输稳定可靠,是专业组装的标准做法。 2. 核心工具与材料 : - 电烙铁 :建议使用可调温烙铁(温度设置在300-350°C),功率30-60W为宜。 - 焊锡丝 :选择含松香芯的63/37锡铅焊锡丝或无铅焊锡丝,直径0.8mm左右。 - 助焊剂 :辅助焊接,提高焊点质量。 - 热缩管 :用于绝缘和保护焊点,按导线直径选择尺寸。 - 辅助工具 :烙铁架、吸锡器、镊子、剥线钳、万用表。 3. 安全规范 : - 通风 :焊接时会产生有害烟气,务必在通风良好处操作。 - 防烫伤 :烙铁头温度极高,切勿触碰,使用后妥善放置于烙铁架。 - 防静电 :焊接前触摸接地金属物体释放静电,避免损坏敏感的飞控和电调芯片。 - 防火:远离易燃物,工作台面铺设耐热垫。 | 1. 焊接基本功练习 :在废旧电路板或练习板上,练习焊接几个标准的"圆锥形"焊点。要求焊点光亮、圆润、无毛刺,焊锡完全包裹导线和焊盘。 2. 工具与材料识别 :将你准备的所有焊接工具和材料摆放在一起,逐一说出其名称和主要用途,并拍照记录。 3. 模拟安全流程:在不通电的情况下,完整模拟一次从准备工具、加热烙铁、焊接、到冷却收纳的全过程,重点演练安全注意事项。 | 1. 为什么焊接时温度不能过高或过低?过高或过低分别会导致什么问题? 2. 热缩管在加热收缩时,为什么最好使用热风枪而不是直接用烙铁头去烫? |
| 4.2 电调与电机的连接:相序与焊接 | 1. 电调的三根电机输出线(通常为三色)和电机的三根线,它们之间的连接顺序有规定吗? 2. 如果连接顺序错了,电机会怎样?如何纠正? 3. 焊接电机线时,线径较粗、电流大,与焊接信号线有何不同?需要注意什么? 4. 焊接完成后,如何检查连接是否可靠? | 理解无刷电机的工作原理:改变任意两根线的顺序,即可改变电机旋转方向。焊接大电流线需确保接触面积足够大,以降低电阻和发热。 | 1. 相序的灵活性 :无刷电调与电机的三根线(A, B, C相)在初始连接时没有固定的顺序 。连接后通电测试,如果电机转向错误,只需任意交换其中两根线的连接 ,即可反转转向。对于多旋翼无人机,所有电机必须按照设计方向(正转/反转)成对工作。 2. 大电流焊接要点 : - 上锡 :焊接前,分别将电调输出线和电机引线的金属部分均匀镀上一层薄锡。 - 对接与焊接 :将镀好锡的线头绞合或对接,用烙铁加热使其熔合在一起,形成饱满的焊点。 - 绝缘处理 :套上合适尺寸的热缩管,用热风枪或打火机(小心)加热使其收缩,完全包裹焊点。 3. 连接检查 : - 视觉检查 :焊点应饱满光亮,无虚焊(焊锡未与导线完全融合)。 - 物理检查 :轻轻拉扯导线,焊点应牢固无松动。 - 万用表检查:使用万用表的通断档,测量电调板上的电机焊盘与电机线另一端是否导通,并确保任意两相之间没有短路。 | 1. 电机线焊接实操 :将电调的三根输出线,与无刷电机的三根引线进行焊接。焊接后,用热缩管做好绝缘。 2. 导通与短路测试 :使用万用表,测试你焊接好的三组连接: - 分别测试每一相是否导通(电阻应接近0Ω)。 - 测试任意两相之间是否短路(电阻应为无穷大)。 3. 记录相序:为你焊接好的电调-电机组合拍照,记录初始的线序颜色对应关系。 | 1. 为什么焊接大电流导线时,虚焊是特别危险的问题? 2. 如果热缩管在收缩后仍有部分未完全贴合,会有什么风险? |
| 4.3 电调与飞控、电源的连接 | 1. 电调的信号线(杜邦头)应该连接到飞控的哪个接口? 2. 多个电调(如四轴)的信号线如何排列?有顺序要求吗? 3. 电调的动力输入线(红黑粗线)如何与电池连接?直接焊接还是使用插头? 4. 所有电调的负极(黑线)是否需要都连接到飞控的GND? | 明确信号流与电流流的路径。信号线负责传递飞控的PWM/DShot指令,必须连接到飞控对应的电机输出通道。动力线负责输送大电流,连接必须绝对可靠。 | 1. 信号线连接 :电调的信号线(通常为三线:5V或VCC, GND, Signal)应连接到飞控上标有"M1"、"M2"、"M3"、"M4"等的电机输出端口。连接时务必注意针脚顺序 (信号线、正极、负极),通常白色或黄色线为信号线。 2. 电机顺序 :对于多旋翼,电机顺序和转向必须严格按照飞控说明书或调参软件中定义的布局图来连接。错误的顺序将导致飞机解锁后瞬间翻覆。 3. 动力线连接 : - 焊接 :最可靠的方式。将所有电调的正极(红线)焊接在一起,所有负极(黑线)焊接在一起,形成"电源总线"。再从总线上引出正负极线与电池插头(如XT60)焊接。 - 使用分电板 :一种带有焊盘或插座的电路板,可以更整洁、安全地集中连接所有电调的动力线。 4. 共地:是的,所有电调信号线的GND(黑线)都必须连接到飞控的GND。这为控制信号建立一个共同的参考电位,确保信号稳定。如果使用带BEC的电调,通常只需其中一个为飞控供电即可,其他电调的BEC 5V输出线可以悬空或剪掉(避免电压冲突)。 | 1. 查阅飞控手册 :找到你所用飞控的说明书或引脚定义图,确认电机输出端口的位置和针脚定义。 2. 规划与焊接电源总线 : - 规划好所有电调动力线在机架上的走线路径。 - 将所有电调的正极线拧在一起焊接,负极线拧在一起焊接。 - 将焊接好的电源总线焊接到一个XT60母头上。 3. 连接信号线:将四个电调的信号线,按照飞控电机布局图(通常是1-4号电机对应前右、前左、后左、后右),依次插入飞控的M1-M4端口。 | 1. 如果不小心将电调信号线的正极(5V)接到了飞控的信号针脚上,可能会发生什么? 2. 为什么建议在电源总线上,靠近电池接口处安装一个电容?这个电容起什么作用? |
| 4.4 基础设置与首次上电检查 | 1. 在连接电池之前,必须进行什么检查?为什么这叫"烟雾测试"(指通电可能冒烟烧毁的测试)? 2. 如何确保遥控器与接收机/飞控已正确对频并工作? 3. 首次上电后,正常的电调和飞控会有什么提示?听到什么声音?看到什么灯? 4. 如果上电后没有任何反应,或电调发出异常报警声,第一步应该做什么? | 建立"先检查,后通电"的安全思维。首次通电是风险最高的环节,系统的目视检查和基础设置是避免"放烟花"(烧毁)的关键。 | 1. 上电前检查清单(烟雾测试清单) : - 确保螺旋桨已拆除 :铁律! - 检查焊接 :目视检查所有焊点,确保无短路(锡桥)、无虚焊。 - 检查极性 :用万用表确认电池插头正负极与电调总线正负极对应正确。 - 检查连接 :确认所有插头连接牢固,无松动或错位。 2. 遥控器对频与检查 : - 确保遥控器与接收机已成功对频。 - 打开遥控器,在飞控调参软件(如Betaflight)的"接收机"标签页,检查各通道(油门、横滚、俯仰、偏航)的数值是否随摇杆移动而正确变化。 3. 正常上电流程 :连接电池后,通常会听到电调发出"哔-哔-哔"的启动音乐(不同品牌旋律不同),随后飞控状态灯开始按特定模式闪烁(如GPS搜星)。这表明系统自检通过。 4. 故障排查第一步 :立即断开电池! 然后根据电调的报警声(长短音组合)查阅其说明书,判断是电压异常、信号丢失还是其他问题。最常见的原因是信号线连接错误或电池电压过低。 | 1. 执行完整的烟雾测试 :对照清单,逐项检查你的组装机架。将检查过程和结果记录在笔记本上。 2. 遥控器通道验证 :不连接电池,仅通过USB线连接飞控到电脑。打开调参软件,进入接收机页面,拨动遥控器摇杆和开关,确认屏幕上对应的通道条有反应。 3. 首次安全通电 : - 将无人机放置在空旷、非易燃的平面上。 - 插入电池,仔细聆听电调启动音,观察飞控LED指示灯状态。 - 记录听到的提示音节奏和灯光闪烁模式。 4. 查阅文档:根据你电调的型号,在网络上查找其"报警音含义表",并记录下来。 | 1. 电调上电时发出的"哔哔"声,具体是由哪个部件发出的?其作用是什么? 2. 如果上电后飞控灯正常,但电调没有任何声音,可能是什么原因?(提示:从供电和信号两方面思考) |
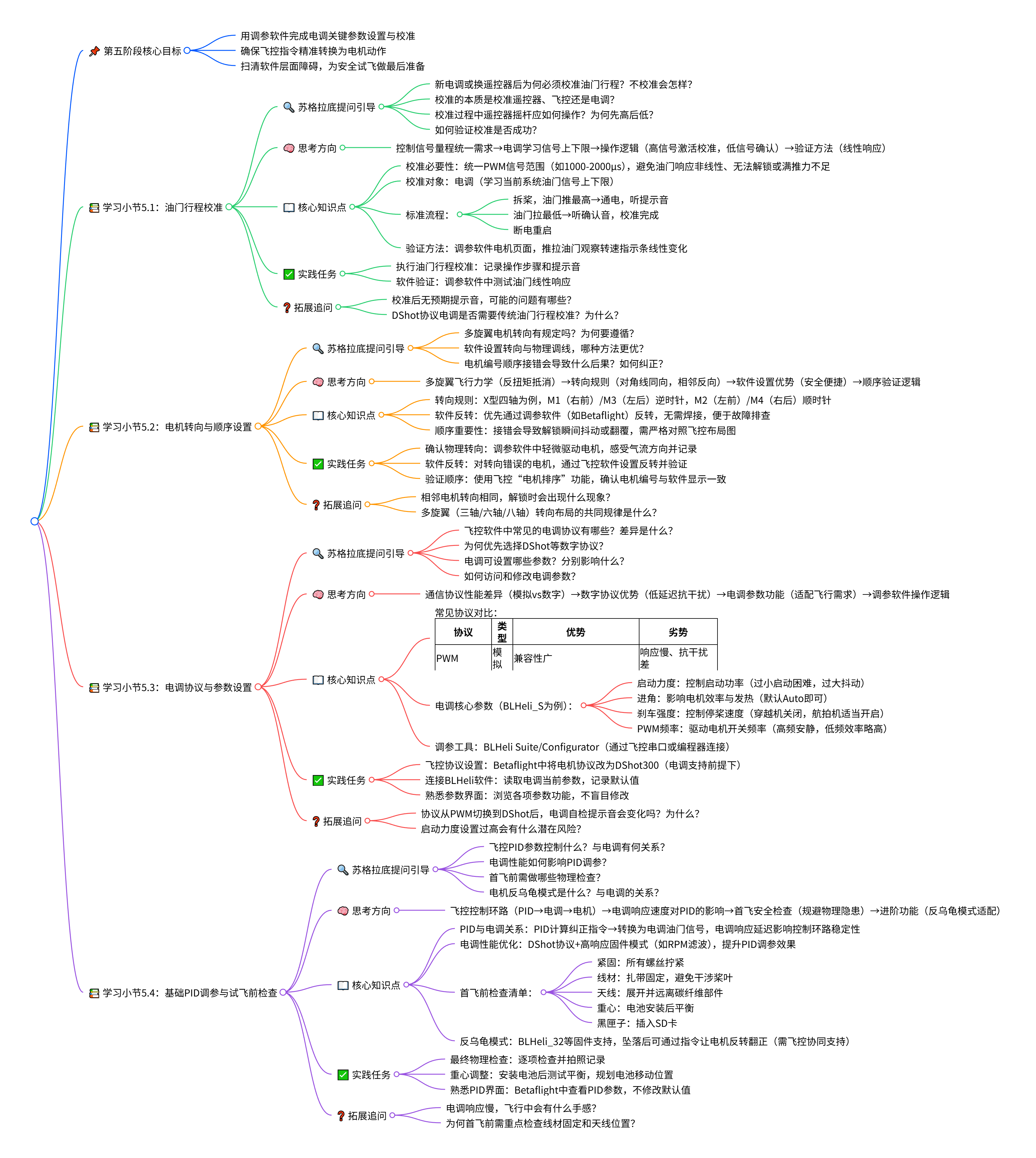
第五阶段:软件调试与校准(第22-24天)
核心目标:使用调参软件对电调进行关键参数设置与校准,确保飞控指令能精确、一致地转换为电机动作,为安全试飞打下最后一道基础。
| 学习小节 | 苏格拉底提问引导 | 思考方向 | 核心知识点(通俗易懂版) | 实践任务 | 拓展追问 |
|---|---|---|---|---|---|
| 5.1 油门行程校准:让遥控器与电调"说同一种语言" | 1. 为什么新电调或更换遥控器后必须进行油门行程校准?不校准会怎样? 2. 校准的本质是什么?是校准遥控器、飞控还是电调? 3. 校准过程中,遥控器的摇杆应该放在什么位置?为什么要先高后低? 4. 校准成功后,如何验证校准是否准确? | 理解校准的目的是统一控制信号的"量程"。遥控器输出的PWM信号范围(如1000-2000μs)必须被电调正确识别为转速的0%到100%。 | 1. 校准的必要性 :不同厂商的遥控器、接收机、飞控和电调,其PWM信号的最小值和最大值可能存在微小差异。油门行程校准就是告诉电调:"当我遥控器摇杆推到最低时,这个PWM值(如1050μs)对应你的最低转速(或解锁);推到最高时,这个PWM值(如1950μs)对应你的最高转速。"不校准可能导致油门响应不线性、无法解锁或无法达到满推力。 2. 校准的对象 :校准的是电调 。飞控只是将遥控器的原始信号传递给电调,校准过程是让电调学习当前系统下油门信号的上下限。 3. 标准校准流程(通用) : a. 拆除螺旋桨,连接电池和遥控器。 b. 将遥控器油门杆推至最高位 。 c. 给电调/飞控通电。电调会发出特定提示音(如"哔-哔")。 d. 等待2-3秒后,将油门杆拉至最低位 。电调会发出确认音(如"哔------"),表示校准完成。 e. 断电重启。 4. 验证方法:校准后,在调参软件的电机选项卡中,推拉油门,观察电机转速指示条是否从0%平滑变化到100%。 | 1. 执行油门行程校准 :按照上述通用流程,为你组装好的四轴无人机所有电调执行一次油门行程校准。务必记录下每一步操作和听到的提示音。 2. 在调参软件中验证:使用USB线连接飞控到电脑,在调参软件(如Betaflight)的"电机"标签页(确保已拆除螺旋桨!),勾选"我已了解风险"滑块,缓慢拖动主电机控制滑块。观察四个电机的转速指示是否同步、线性地增加和减少。 | 1. 如果校准过程中,在油门推至最高位通电后,没有听到预期的提示音,可能是什么问题? 2. 对于支持DShot等数字协议的电调,是否还需要进行传统的油门行程校准?为什么? |
| 5.2 电机转向与顺序设置 | 1. 多旋翼无人机(如四轴)的电机旋转方向有规定吗?为什么必须遵循这个规定? 2. 在调参软件中设置电机转向,和物理上调换电机线顺序,哪种方法更好?为什么? 3. 电机的编号顺序(M1, M2, M3, M4)如果接错了会怎样?如何检查和纠正? | 理解多旋翼的飞行力学基础:通过成对电机反向旋转来抵消反扭矩,实现稳定。软件设置提供了更灵活、更安全的调整手段。 | 1. 电机转向规则 :以最常见的"X"型四轴为例,对角线的两个电机转向相同,相邻的电机转向相反。例如,从飞机正前方看,右前(M1)和左后(M3)电机逆时针旋转;左前(M2)和右后(M4)电机顺时针旋转。这是为了抵消电机旋转产生的反扭矩,使飞机不会自旋。 2. 软件反转 vs 物理调线 :现代电调支持通过调参软件(如BLHeli Suite)或飞控软件(如Betaflight)来反转电机转向,而无需焊接调换电机线。软件反转是首选 ,因为它更安全、更方便,且保持了物理接线的一致性,便于排查故障。 3. 电机顺序的重要性:飞控依赖于正确的电机顺序来计算如何控制姿态。如果顺序接错,飞控发出的修正指令会作用于错误的电机,导致解锁瞬间剧烈抖动甚至翻覆。必须在调参软件中严格对照飞控的电机布局图来连接信号线。 | 1. 确认电机物理转向 : - 在调参软件电机标签页,极其小心地 单独拉动每个电机的滑块(从最低值开始,非常轻微地增加),用手指感受电机产生的气流方向,记录每个电机的实际转向。 - 与你的目标转向(根据机架类型查找标准布局图)对比。 2. 使用软件反转电机 :对于转向错误的电机,在飞控软件(如Betaflight)的"电机"设置中,找到"电机方向反转"或类似选项,勾选需要反转的电机编号。保存并重启后,再次测试验证。 3. 验证电机顺序:在调参软件中,通常会有一个"电机排序"或"电机测试"功能,可以依次驱动单个电机。按照屏幕提示,依次触碰每个旋转的电机,确认其编号与软件显示一致。 | 1. 如果一架四轴无人机有两个相邻的电机转向相同,解锁时会是什么现象? 2. 除了四轴,三轴、六轴、八轴无人机的电机转向布局有什么共同规律? |
| 5.3 电调协议与参数设置 | 1. 在飞控软件中,"电机协议"或"ESC协议"选项有哪些?PWM, Oneshot125, DShot300, DShot600有什么区别? 2. 为什么要选择DShot这类数字协议?它比传统的PWM好在哪里? 3. 电调本身还有哪些参数可以设置(如启动力度、刹车、进角)?这些参数会影响什么? 4. 如何访问和修改电调自身的参数? | 理解不同通信协议的性能差异,并根据需求进行选择。了解电调内部参数可以微调其性能以适应不同电机和飞行风格。 | 1. 常见电调协议 : - PWM :传统模拟协议,频率低(通常50Hz),响应慢,抗干扰差。 - Oneshot125/Multishot :更快的模拟协议,信号周期更短,响应速度比PWM快。 - Dshot :现代数字协议,通过数字信号编码指令,抗干扰能力极强,无信号抖动,且支持遥测数据回传(如电调温度、电压)。Dshot后面的数字(如300, 600)代表信号速率(kbit/s),数字越高,理论上延迟越低。 2. 数字协议的优势 :Dshot协议消除了信号校准的需要,指令传递更精确、延迟更低,是现代竞速和花飞无人机的标准选择。 3. 电调固件参数(以BLHeli_S为例) : - 启动力度 :控制电机启动时的功率。力度太小可能启动困难,太大可能启动抖动。 - 进角 :影响电机效率和发热。一般保持自动(Auto)即可。 - 刹车强度 :控制油门归零后电机停止的速度。穿越机通常关闭,航拍机可适当开启使停桨更干脆。 - PWM频率 :电调驱动电机的开关频率。高频(如48kHz)更安静,低频(如24kHz)可能效率稍高但声音尖。 4. 设置方法:需要通过专用软件(如BLHeli Suite, BLHeli Configurator)连接电调进行设置。连接方式通常是通过飞控的串口或专用的编程器。 | 1. 在飞控软件中设置协议 :进入Betaflight的"配置"页面,找到"电机协议"或"ESC/Motor Protocol"选项,将其从默认的PWM改为Dshot300 (如果你的电调支持)。保存并重启。 2. 连接BLHeli调参软件 : - 通过USB线连接飞控到电脑。 - 打开BLHeli Suite软件,选择正确的接口(如COM口)和电调固件类型。 - 点击"连接",读取当前电调参数。 3. 查看与记录 :浏览软件中的各项参数,如"启动力度"、"进角"、"PWM频率"等,记录下它们的默认值。初学者不建议立即修改,先了解界面和功能。 | 1. 将电调协议从PWM切换到DShot后,电调的自检提示音会变化吗?为什么? 2. "启动力度"设置过高,在电机启动时可能会观察到什么现象?对电机和桨叶有什么潜在风险? |
| 5.4 基础PID调参与试飞前检查 | 1. 飞控的PID参数是控制什么的?和电调有什么关系? 2. 为什么说电调的性能(响应速度)会影响PID调参? 3. 在首次试飞前,除了软件设置,还需要做哪些最后的物理检查? 4. 什么是"电机反乌龟模式"?它和电调有什么关系? | 理解飞控控制环路与电调执行的关系。电调是执行末端,其响应速度直接决定了飞控PID控制的效果。最终检查是确保飞行安全的最后防线。 | 1. PID与电调的关系 :PID控制器是飞控的大脑,它根据飞机当前姿态(实际值)与目标姿态(期望值)的偏差,计算出一个纠正指令。这个指令最终被转换成发送给电调的油门信号。电调的响应延迟 就是这个控制环路的一部分。如果电调响应慢,飞控就需要更"激进"的PID参数来补偿,但这可能导致抖动。 2. 电调性能的影响 :使用DShot等低延迟协议、且电调固件响应模式设置为"高"(如BLHeli的"RPM"滤波模式),可以为飞控提供更干净、更快速的执行反馈,使得PID调参更容易,飞机更跟手。 3. 最终检查清单(首飞前) : - 紧固检查 :所有螺丝(电机、机架、飞控)是否拧紧? - 线材固定 :所有电线是否用扎带或胶固定好,避免与桨叶干涉? - 接收机天线 :天线是否展开并远离碳纤维部件(碳纤维会屏蔽信号)? - 重心 :安装电池后,飞机重心是否在中心位置? - SD卡/黑匣子 :如果录制黑匣子日志,卡是否已插入? 4. 电机反乌龟模式:这是某些电调固件(如BLHeli_32)支持的功能。当飞机坠落后电机倒转("乌龟"姿势),通过一个特殊指令可以让电机反向短时爆发旋转,帮助飞机翻正过来。这需要电调和飞控固件同时支持。 | 1. 执行最终检查 :对照上述清单,对你的无人机进行逐项检查,并拍照记录每个部分的紧固和走线情况。 2. 模拟重心调整 :将电池放在你预设的位置,用手指托起机架中心,观察飞机是否基本平衡。如果不平衡,规划好电池前后移动的位置。 3. 了解PID界面 :在Betaflight的"PID调参"页面,滑动PID滑块,观察数值变化。但不要进行任何修改,仅了解P(比例)、I(积分)、D(微分)三个参数的位置。首次飞行应使用默认或保守的预设PID。 | 1. 如果电调的响应速度很慢,飞手在飞行中可能会感觉到飞机有什么样的"手感"? 2. 为什么在最终检查中,要特别强调"线材固定"和"天线远离碳纤维"? |