目录
1.课题概述
非对称六相电机是多相电机的典型代表,相较于传统三相电机,其具备功率密度高、容错能力强、转矩脉动小等优势,在电动汽车、船舶推进、航空航天等大功率、高可靠性领域具有广泛应用前景。对非对称六相电机的分析需基于静止坐标系(如自然坐标系、αβ坐标系)和正交旋转坐标系(如dq坐标系)的坐标变换,通过坐标变换可将复杂的多变量耦合系统解耦为独立的子系统,简化电机的建模与控制。
2.系统仿真结果
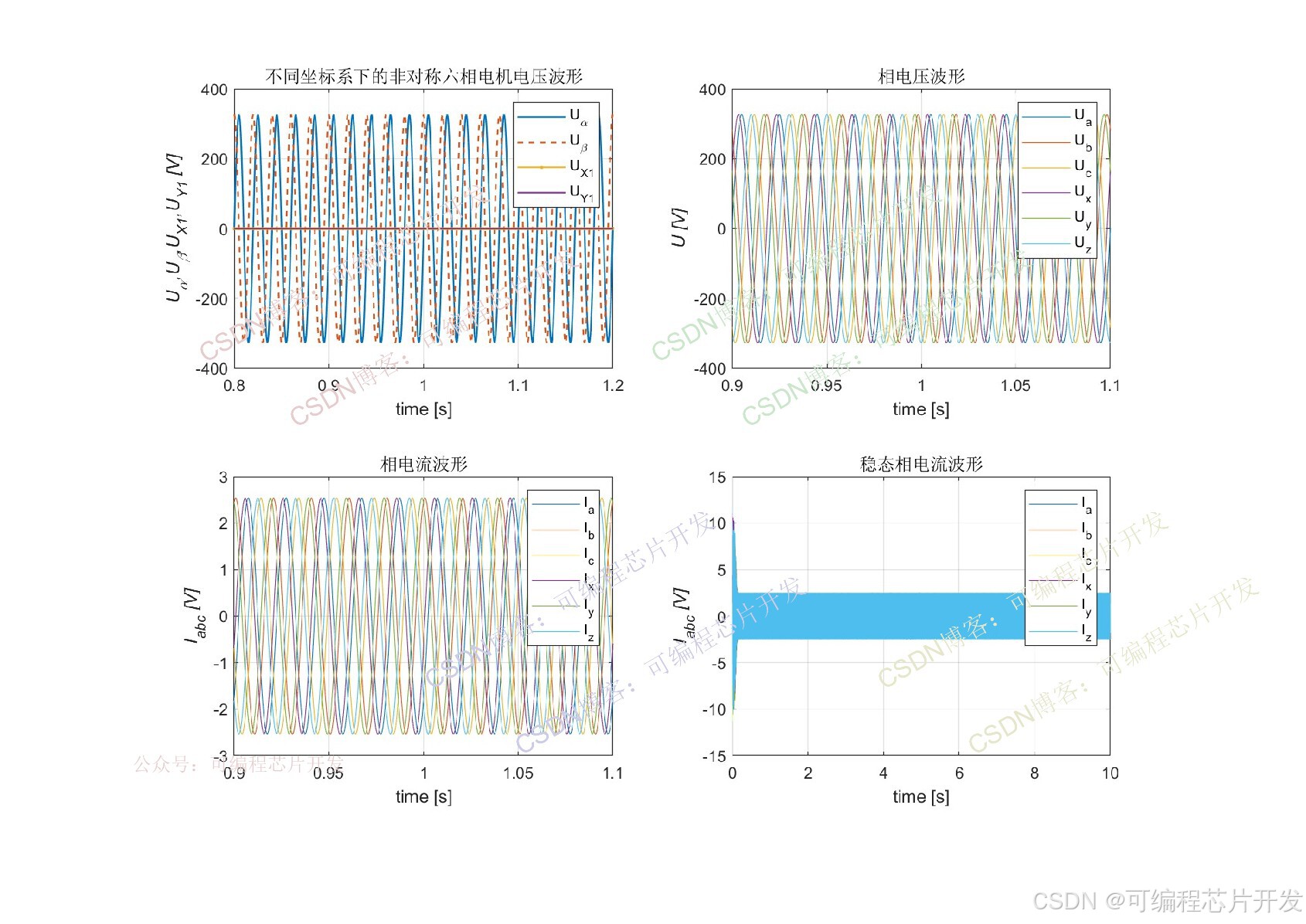
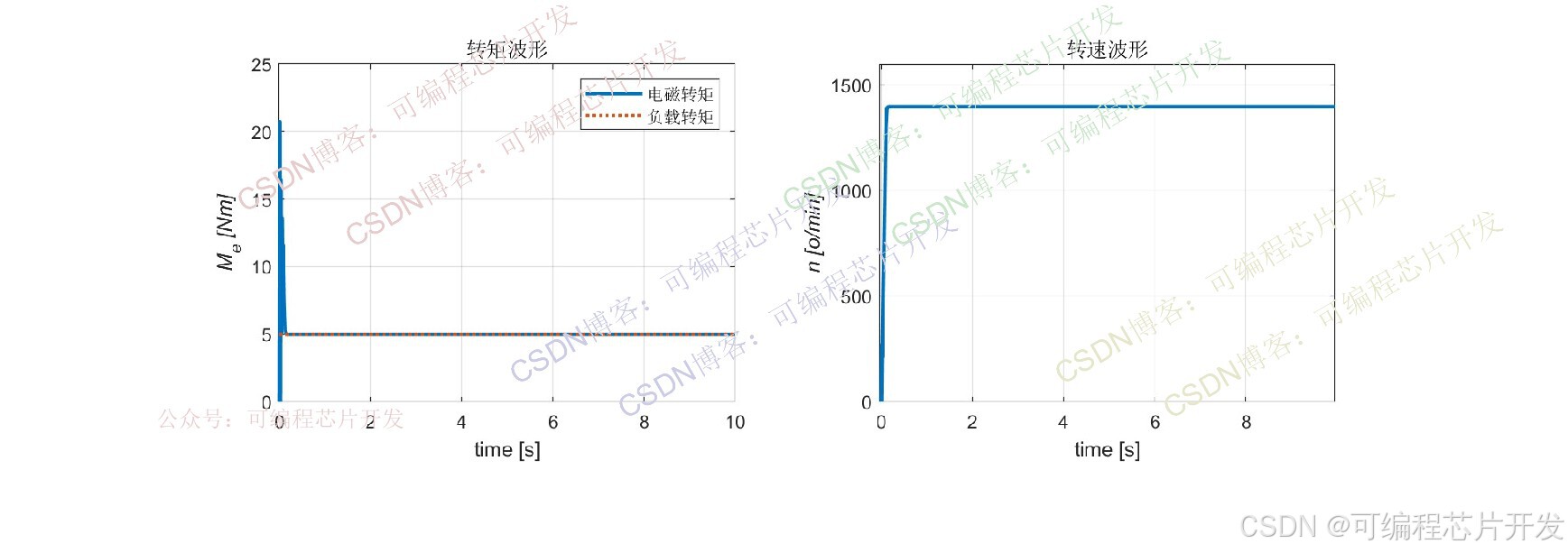
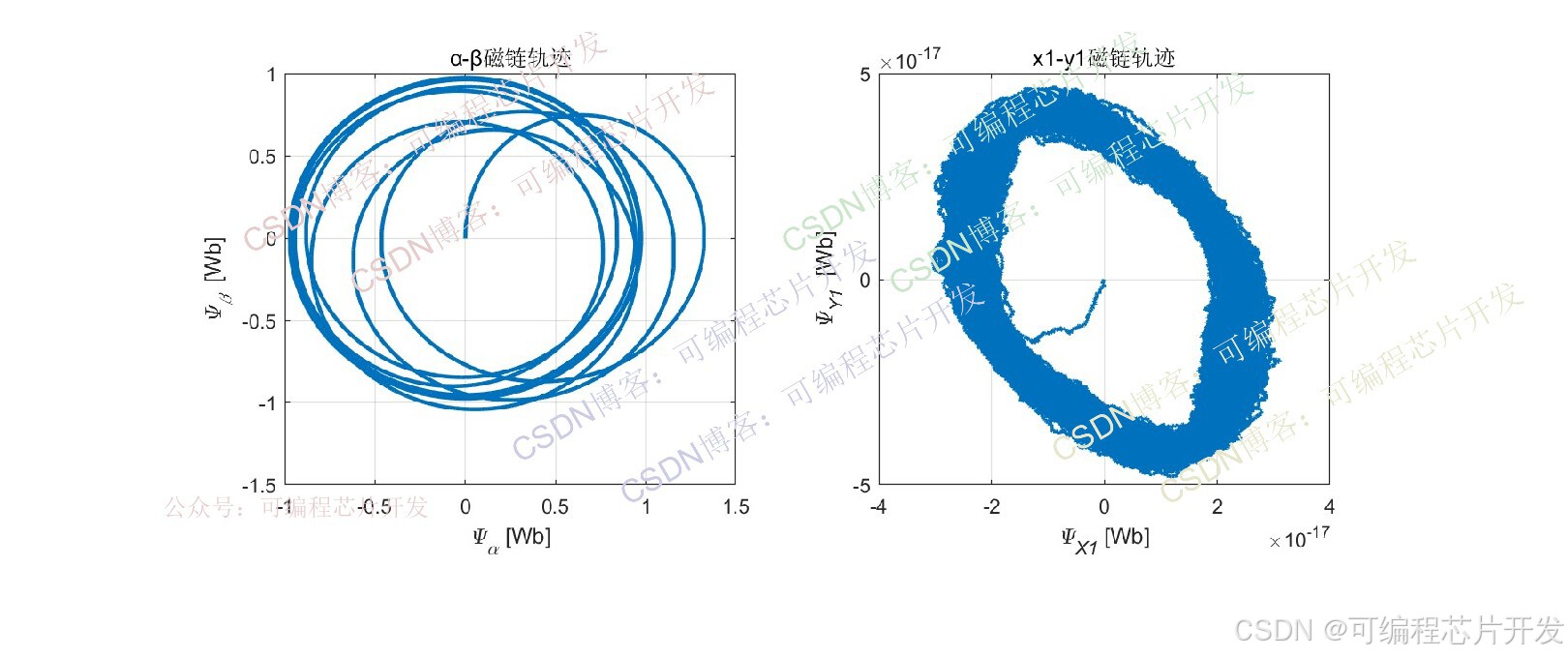
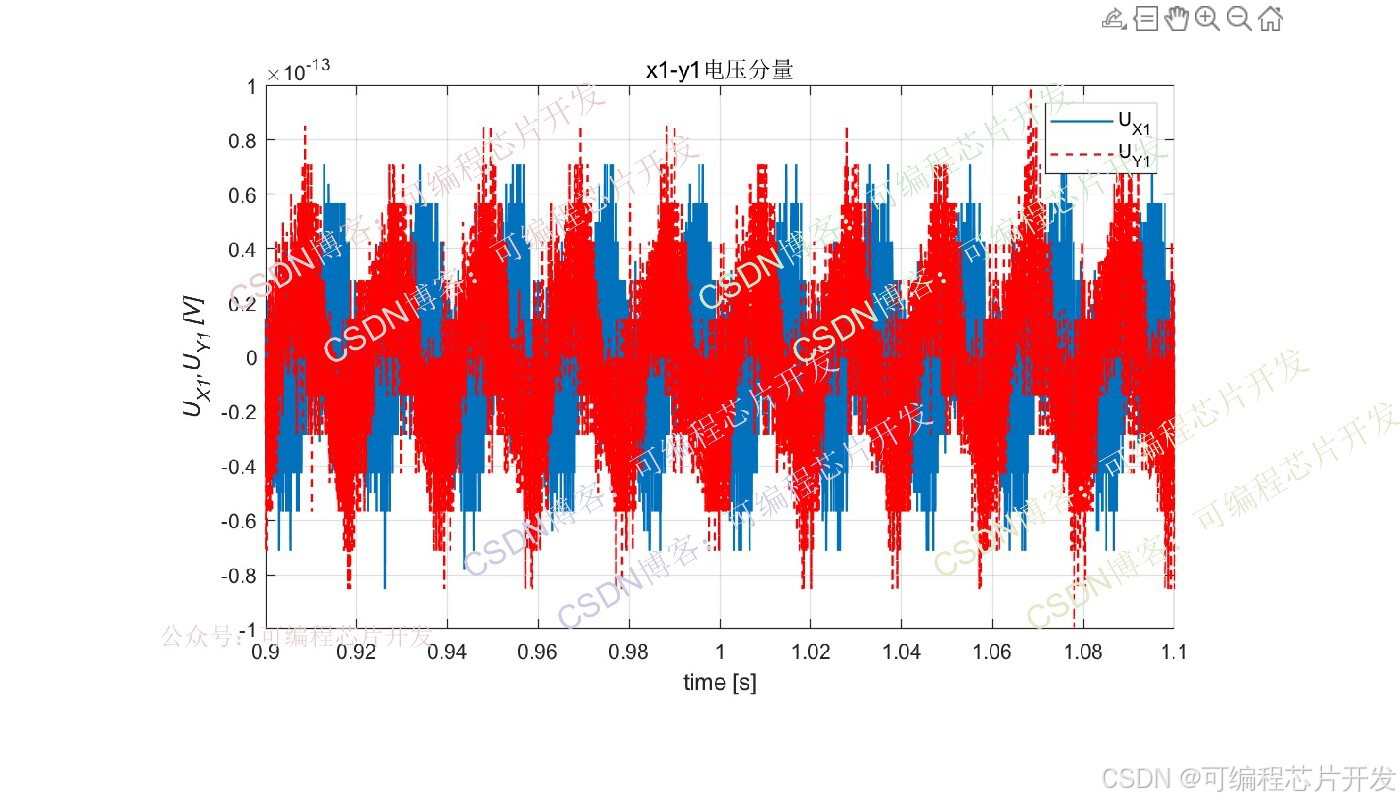
3.核心程序或模型
版本:Matlab2024b
135
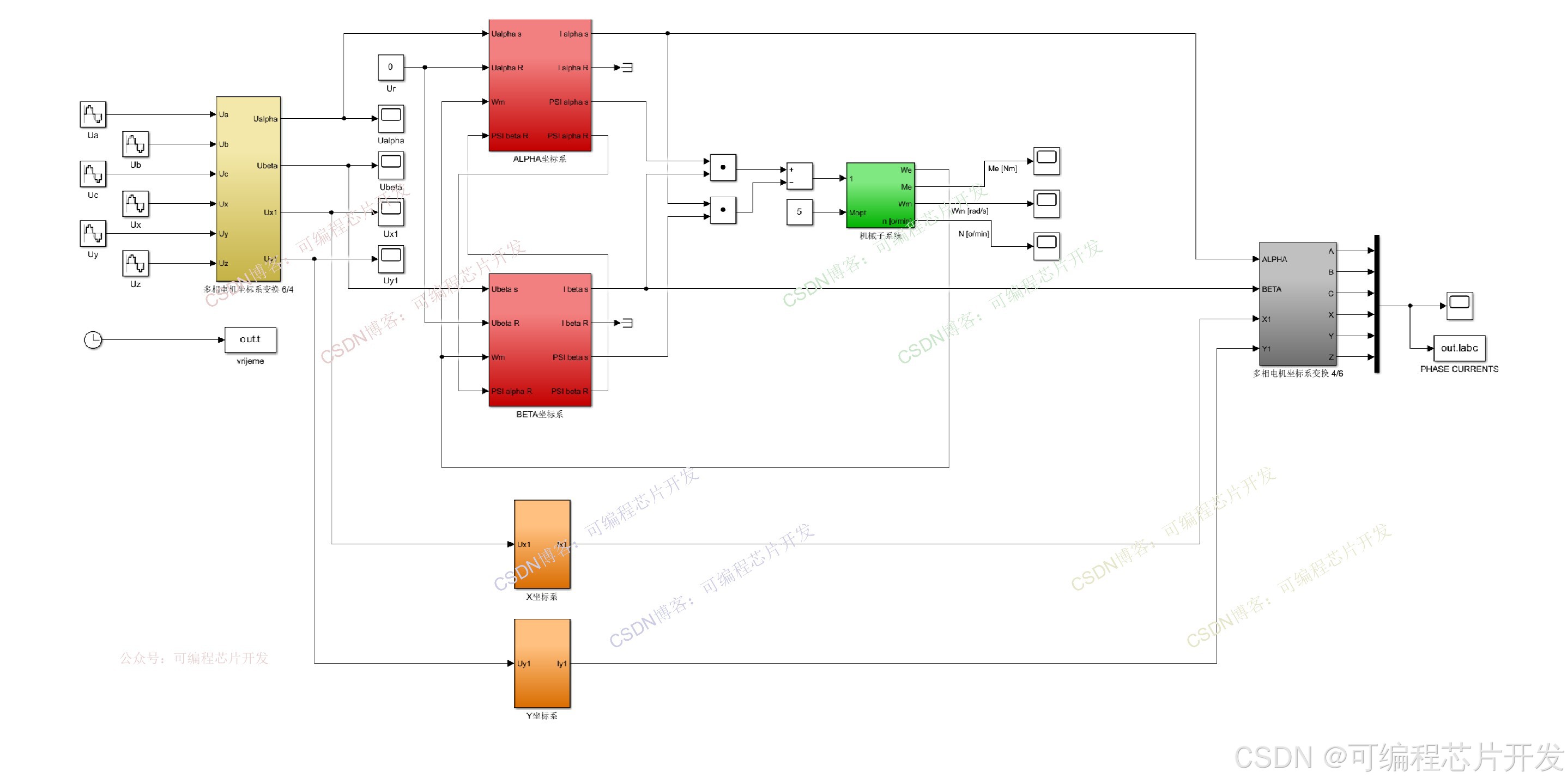
4.系统原理简介
非对称六相电机的定子包含两套三相绕组,记为绕组A、B、C和绕组X、Y、Z,两套绕组共用一个转子(永磁同步转子或异步感应转子)。其核心特征为:
1.两套三相绕组的匝数、线径、空间分布形式完全一致;
2.两套绕组在空间上的电角度位移为α(典型值α=30°),而非对称六相电机的60°;
3.绕组的中性点可独立引出(非隔离中性点)或短接(隔离中性点),中性点的连接方式会影响电机的零序电流特性。
定子绕组通入交变电流后,会产生旋转磁动势,其基波磁动势是驱动转子旋转的核心动力。对于非对称六相电机,定子总磁动势为两套三相绕组磁动势的矢量和。
假设两套三相绕组的相电流分别为:
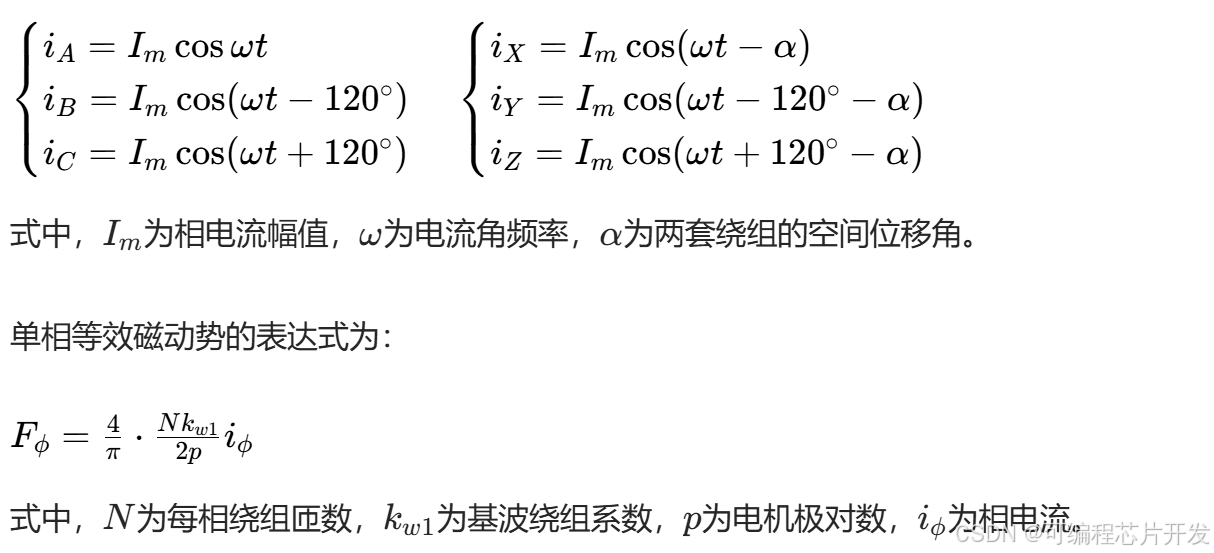
两套三相绕组的基波磁动势分别为FABC和FXYZ ,定子总基波磁动势为:

由于两套绕组空间位移α角,磁动势矢量叠加后,总磁动势的幅值更大且谐波分量被抑制。 转子旋转时,定子绕组切割转子磁场会产生感应电动势。非对称六相电机的相电动势为正弦波,其有效值为:

5.完整工程文件
v v
关注后,GZH回复关键词: a16