基于MATLAB的单闭环直流调速系统设计 本设计包括设计报告,仿真程序,电气接线图。 设计要求 (1)该调速系统能进行平滑的速度调节,负载电机不可逆运行,具有较宽的调速范围(D≥10),系统在工作范围内能稳定工作 (2)根据指标要求进行动态校正,选择调节器的参数,并确定电流截止负反馈环节的相关参数, (3)系统在5%负载以上变化的运行范围内电流连续
直流电机调速这事儿,说白了就是和电机的倔脾气较劲。今天咱们要搞的这个单闭环系统,核心思路就是用转速反馈来「驯服」电机转速。别看原理图上就几个方框,实际调参时能让头发掉一地------别问我怎么知道的。
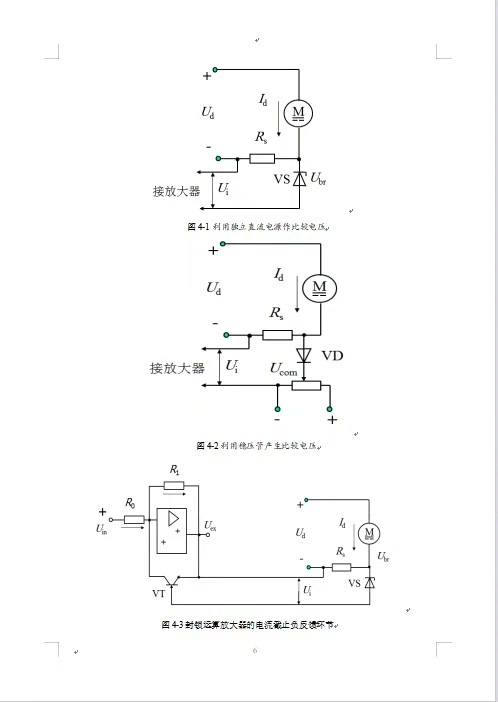
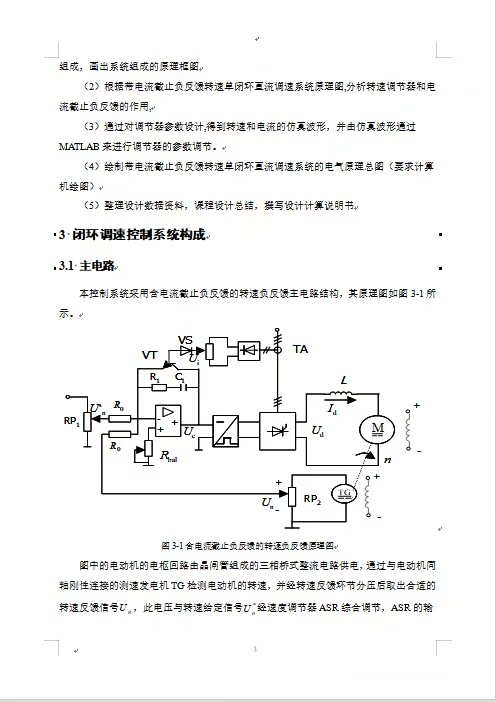
先说系统骨架(图1)。电枢回路用晶闸管供电,调速器选了个比例积分(PI)结构。重点是这个电流截止负反馈,这玩意儿就像个安全员,平时摸鱼划水,电流一超标立马跳出来干活。关键参数是电流截止点,得算准了才能让系统在正常运行时不受干扰。
参数计算这块最刺激。假设电机参数是220V/1500rpm,电枢电阻0.5Ω。先算调速范围:
matlab
n_min = 1500 / 10; % D≥10的调速范围
disp(['最低转速:',num2str(n_min),'rpm'])动态校正得搬出经典套路------伯德图法。咱们在MATLAB里直接调用pidTuner,但得注意相角裕量别低于45度:
matlab
motor_tf = tf([1],[0.12 1]); % 电机近似传递函数
pidTuner(motor_tf,'pi') % 调出神器电流截止环节的参数计算有讲究。假设允许的最大冲击电流是额定电流的1.5倍:
matlab
I_rated = 20; % 额定电流20A
R_sense = 0.1; % 取样电阻
V_cutoff = I_rated * 1.5 * R_sense; % 比较器阈值
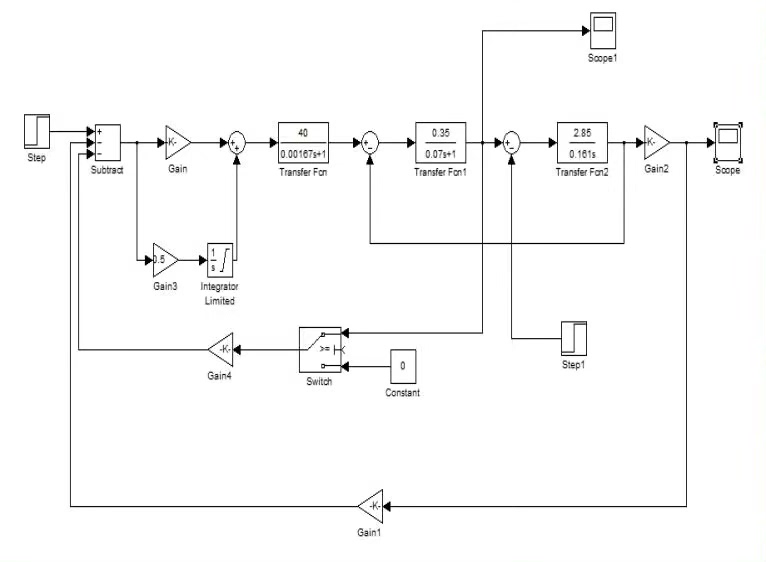
disp(['截止电压设:',num2str(V_cutoff),'V'])仿真环节最打脸。刚开始做阶跃响应时,电机转速像蹦极似的上下晃。后来发现是积分时间常数没调好,改了两处参数:
matlab
% 修改后的PI参数
Kp = 0.85;
Ki = 13.2;系统联调时遇到个坑爹问题:负载突变时电流断续。解决办法是给电枢回路加了个平波电抗器,电感量算起来挺有意思:
matlab
L = (0.693 * V_arm) / (I_min * f_sw); % 临界电感公式
disp(['至少需要',num2str(L*1000),'mH电感'])最后测试时故意把负载从10%突加到100%,看着转速曲线稳如老狗,心里那个舒坦。不过说实话,实际调试时示波器上出现的毛刺还是让人心惊肉跳------好在MATLAB仿真帮我们趟了大部分雷。
代码文件建议用模块化结构,分成参数配置、控制器设计、仿真验证三个部分。别把所有代码堆在一个脚本里,不然调试时找变量就像在垃圾堆里翻钥匙。