你是否见过这样的矛盾场景:工厂机器人能轻松举起百公斤重物,却会在抓取鸡蛋时瞬间将其捏碎;柔性机械抓手能温柔托起玻璃制品,面对重载时却力不从心;传统机械臂在规整环境中得心应手,遇到不规则物体或复杂空间就束手无策。
* 本文只做阅读笔记分享 *
一、行业痛点:传统抓取的 "两难困境"
成功的抓取过程包含两个关键阶段 ------构建稳定抓取姿态与保持抓取并安全操作,而这两个阶段的需求天然冲突:
构建阶段需要 **"灵活多变":**要适应不同形状、尺寸的物体,还要能在狭窄空间、杂乱环境中调整姿态;
保持阶段需要 **"强固且温和":**既要抵抗重力、惯性等干扰力,又不能对易碎品(如玻璃、瓜果)或柔软对象(如人体)造成压力损伤。
传统技术始终被困在 "单一拓扑形态" 的牢笼中:
**开环机构(如机械臂、柔性手指):**末端可自由活动,能灵活构建抓取姿态,但需依赖弯曲刚度保持抓取,必然牺牲柔性,无法兼顾 "强" 与 "柔";
**闭环机构(如绳索、吊索):**通过张力均匀分散载荷,可温柔承载重物,但缺乏自由末端,无法灵活绕行物体,抓取通用性极差。
从工业场景中的重型易碎件搬运,到养老护理中的人体转移,传统技术要么需要复杂人工辅助,要么存在安全隐患,始终难以满足高要求应用场景的需求。
二、核心创新:拓扑变换实现 "双向赋能"
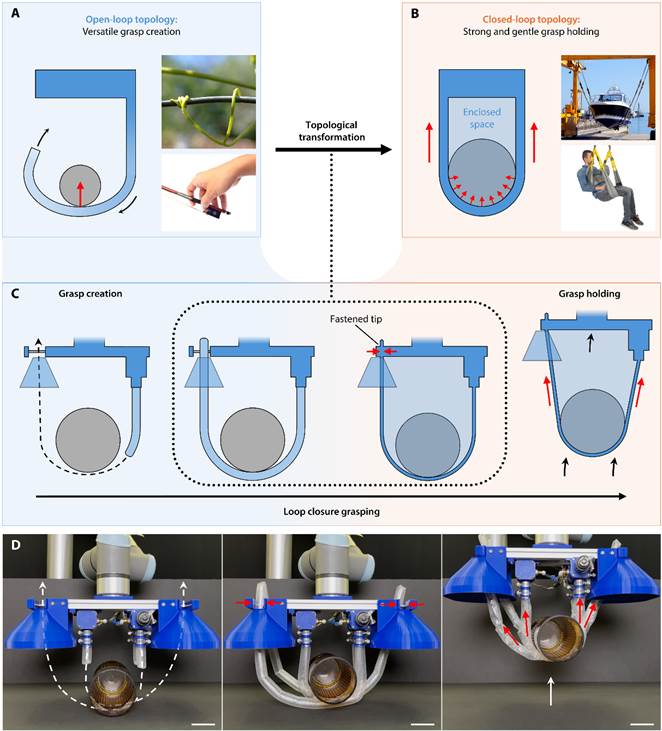
环闭抓取的革命性突破,在于让抓取机构在不同阶段动态切换拓扑形态------ 用开环形态实现 "灵活构建",用闭环形态实现 "强柔并济",通过拓扑变换将两者优势完美融合,彻底打破传统技术的性能枷锁。
1. 三步实现完美抓取
整个抓取过程遵循清晰的逻辑链条,每一步都精准匹配阶段需求(图 2):
① **开环构建阶段:**机构以开环形态活动,末端可自由绕行物体,甚至能穿过比自身直径小 35% 的狭窄缝隙,灵活调整至理想抓取姿态;
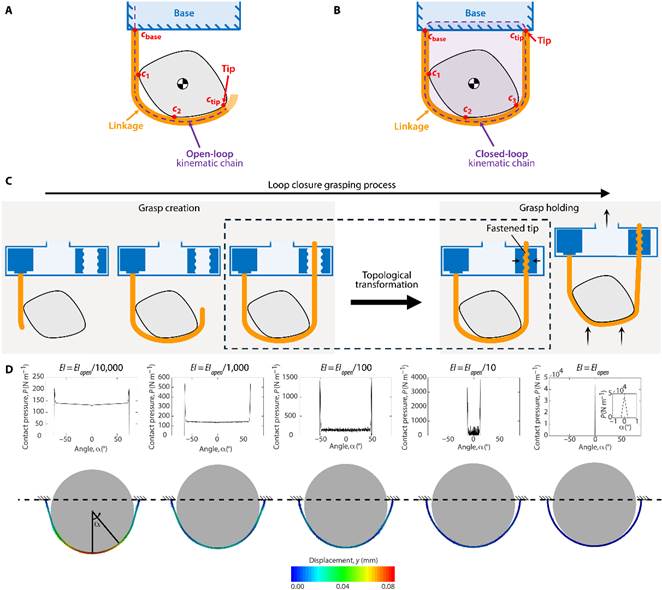
② **拓扑变换阶段:**通过末端紧固装置,将开环机构的末端与基座固定,形成闭环结构,且不改变已构建的抓取姿态;
③ **闭环保持阶段:**闭环机构放气后呈现 "无限弯曲柔顺性"(零弯曲刚度),仅通过张力承载载荷,压力均匀分散在大面积接触面上,实现强固且温和的抓取。
释放抓取时,只需解除末端固定,恢复开环形态即可灵活脱离物体,整个过程流畅且无损伤。
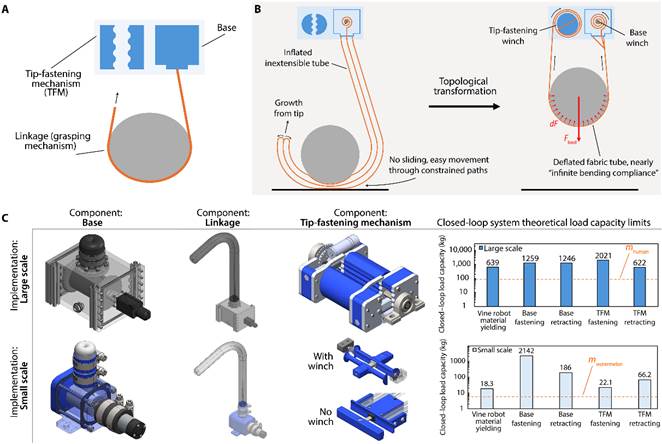
2. 关键载体:软生长充气梁机器人
为实现这一理念,研究团队选用 "软生长充气梁机器人(Vine robots,藤蔓机器人)" 作为核心执行机构,其特性完美匹配设计需求:
**充气时:**呈开环管状结构,通过压力驱动从末端 "生长",可绕行障碍物、穿过狭窄空间,甚至能在物体与支撑面之间无间隙穿行;
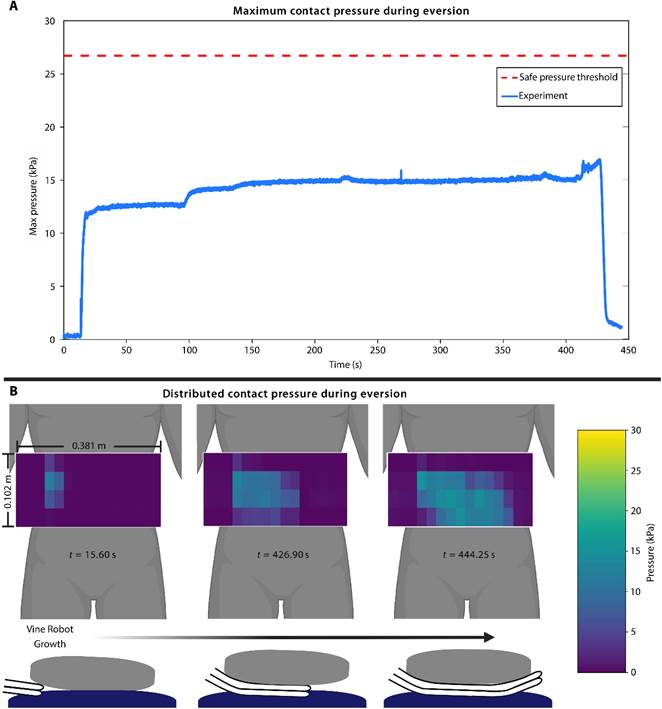
**放气后:**变为柔性片状结构,拉伸强度极高(大型系统单环可承载 622kg),弯曲刚度趋近于零,接触压力可低至 16.95kPa(远低于医疗吊带 26.7kPa 的安全阈值);
配合末端紧固绞盘和基座卷扬机,实现拓扑变换与载荷调节,构成完整的环闭抓取系统。
三、实测验证:这些难题终于被攻克
研究团队通过一系列严苛实测,全面验证了环闭抓取的超强性能,覆盖多个传统技术难以企及的场景:
1. 灵活多变:复杂环境与异形物体轻松应对
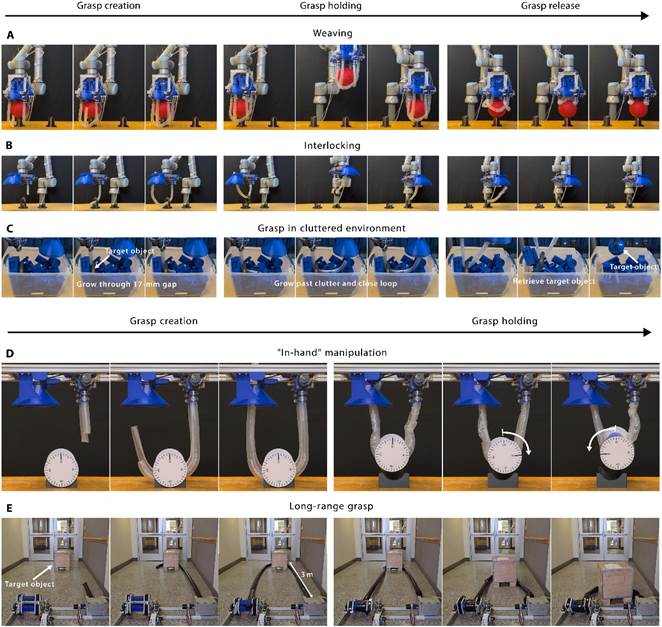
**杂乱环境作业:**成功抓取掩埋在零件堆中的 6.8kg 哑铃,藤蔓机器人灵活穿过 17mm 窄缝(自身直径 26mm),避开周围所有障碍物;
**拓扑互锁抓取:**通过开环绕行、闭环锁定,实现与圆环、水桶手柄的 "霍普夫链" 式抓取,理论上抗干扰能力无限,这是首次实现该拓扑构型的 robotic 抓取;
**无间隙抓取:**针对桌面放置的玻璃花瓶,藤蔓机器人从花瓶与桌面的缝隙中穿行,无需预先开辟空间即可形成闭环,平稳将花瓶举起;
**远距离操作:**成功抓取 3 米外的箱体并拉回,藤蔓机器人最长可延伸至 6.7 米,远超自身基座尺寸,还能抓取比基座大 19 倍的物体。
2. 强柔并济:重型易碎件与人体安全承载
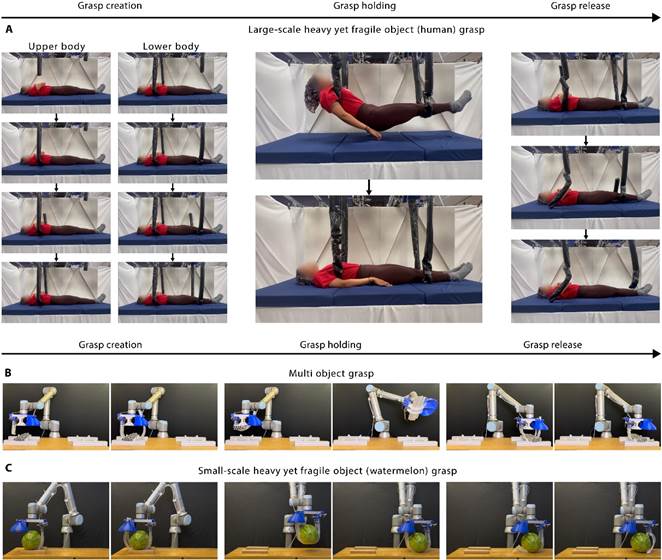
**人体转移:**大型系统通过两个藤蔓机器人,从床面与人体之间的缝隙中穿行并形成闭环,平稳抬起 74.1kg 的人体至 25cm 高度,全程无不适,接触压力仅 16.95kPa,远低于医疗安全阈值;
**重型易碎件抓取:**小型系统成功抓取 5.9kg 的西瓜和 1.0kg 的玻璃花瓶,既无挤压损伤,又能稳定承载,解决了 "重而脆" 物体的抓取难题;
**多物体同步抓取:**通过闭环收紧,将一堆不规则管道牢牢固定并转移,无需依赖重力即可保持稳定抓取,释放时平滑无摩擦。
3. 精细操控:空中姿态调整成为可能
利用放气后藤蔓机器人的连续柔性,配合两端卷扬机的协同操作,可实现物体的空中姿态调整。实验中,系统成功抓取圆柱物体后,通过调整藤蔓机器人的长度分配,让圆柱在半空中旋转,展现出超越传统抓取的精细操控能力。
四、应用前景:多领域迎来 "抓取革命"
环闭抓取技术的突破,不仅解决了长期存在的技术矛盾,更极大拓宽了机器人抓取的应用边界,多个高价值领域将直接受益:
1. 医疗与护理
老年人、残疾人的无接触转移,避免人工搬运的拉伤风险和压力损伤;
医院患者的床旁转移、康复训练辅助,提升医疗服务的安全性与效率。
2. 工业与制造
重型易碎件(如航空部件、玻璃制品)的柔性搬运,降低生产损耗;
农业采摘、 livestock 转运,兼顾效率与产品完整性。
3. 应急与救援
废墟中伤员转移、狭小空间重物清理,无需预先开辟操作空间;
海上、山地救援中的人员与物资转运,适应复杂地形环境。
4. 特种场景
航天领域:在轨空间碎片收集、航天员应急救援,长距离柔性操控;
仓储物流:不规则货物的快速分拣与转运,提升分拣效率;
可穿戴设备:自动紧固衣物、医疗辅助装置,提升佩戴便利性。
结语
从单一拓扑到动态切换,环闭抓取技术用 "形态变革" 重新定义了机器人抓取的可能性。软生长机器人与拓扑变换的巧妙结合,既最大化了软机器人的柔顺优势,又弥补了其承载能力的短板,让 "强固、温和、多变" 不再是相互矛盾的需求。
未来,随着多段式、分支式藤蔓机器人的发展,以及主动转向、传感控制技术的升级,这项技术将在更多高难度场景中落地。当机器人既能稳稳举起千斤重物,又能温柔托住一片羽毛,既能灵活穿梭复杂空间,又能精准操控物体姿态,一个更加智能、安全、高效的自动化时代正加速到来。
参考文献:
Kentaro Barhydt et al. Loop closure grasping: Topological transformations enable strong, gentle, and versatile grasps. Sci. Adv.11, eady9581(2025).