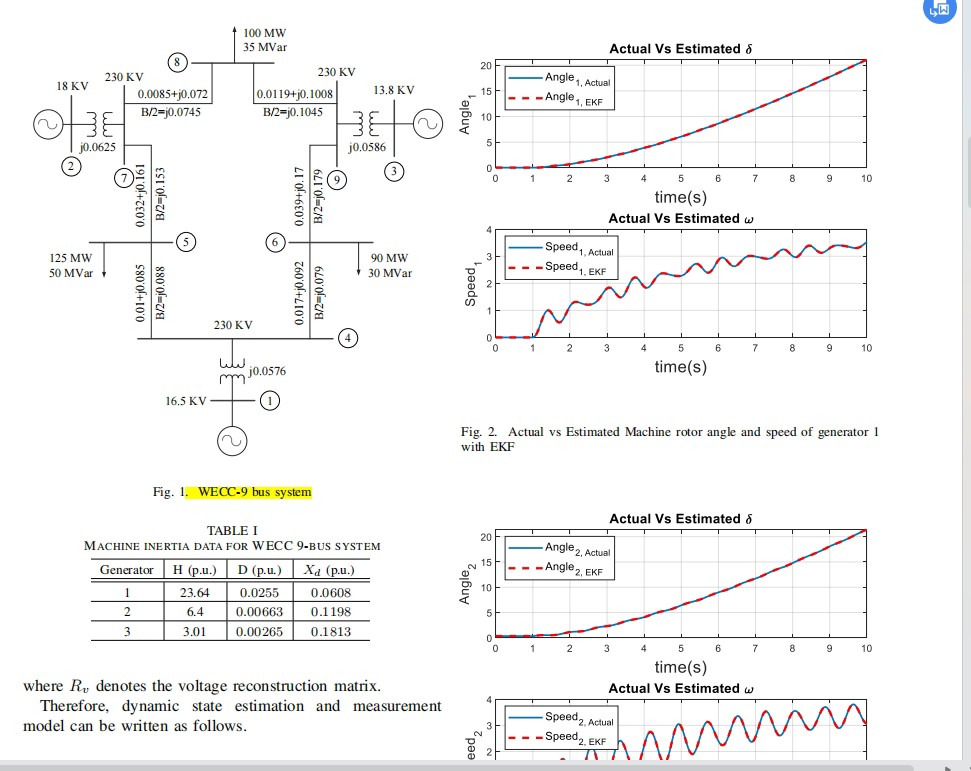
复现《基于扩展(EKF)和无迹卡尔曼滤波(UKF)的电力系统动态状态估计》 该程序对应文章《Power System Dynamic State Estimation Using Extended and Unscented Kalman Filters》,电力系统状态的准确估计对于提高电力系统的可靠性、弹性、安全性和稳定性具有重要意义,虽然近年来测量设备和传输技术的发展大大降低了测量和传输误差,但这些测量仍然不能完全没有测量噪声。 因此,需要对噪声测量值进行过滤,从而获得准确的电力系统运行动态。 本程序采用两种方法,分别是扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF),对电力系统进行动态状态估计,以39节点系统为算例验证了方法的有效性。 注:该程序需要安装matpower插件,否则运行会报错。
在电力系统领域,准确估计系统状态对提升其可靠性、弹性、安全性与稳定性至关重要。尽管测量设备和传输技术不断进步,测量噪声依旧无法完全消除。所以,对噪声测量值进行过滤,获取准确的电力系统运行动态成为关键,而这篇文章采用的扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)方法就为我们提供了有效的解决思路,今天就来尝试复现相关程序。
前置条件:安装matpower插件
值得注意的是,该程序运行依赖matpower插件,如果没有安装,运行时将会报错。具体的安装过程可参考matpower官方文档,按照对应系统和Matlab版本进行正确安装。
扩展卡尔曼滤波(EKF)
EKF原理简述
EKF是一种用于非线性系统状态估计的方法,它通过对非线性系统进行一阶泰勒展开线性化,从而应用卡尔曼滤波框架进行状态估计。
代码实现示例(Matlab)
matlab
% 假设已经有了系统模型函数f(x, u)和观测函数h(x)
% 初始化参数
x_hat = zeros(n, 1); % 初始状态估计
P = eye(n); % 初始估计协方差
Q = Q_matrix; % 过程噪声协方差
R = R_matrix; % 观测噪声协方差
for k = 1:num_steps
% 预测步骤
x_hat_minus = f(x_hat, u(:, k));
F = jacobian(f(x_hat, u(:, k)), x_hat);
P_minus = F * P * F' + Q;
% 更新步骤
y = h(x_hat_minus);
H = jacobian(h(x_hat_minus), x_hat_minus);
K = P_minus * H' / (H * P_minus * H' + R);
x_hat = x_hat_minus + K * (z(:, k) - y);
P = (eye(n) - K * H) * P_minus;
end代码分析
- 初始化部分 :首先初始化状态估计
x_hat为零向量,估计协方差P为单位矩阵,同时设定过程噪声协方差Q和观测噪声协方差R。这些初始值的设定对后续估计结果有一定影响,需要根据实际系统特性进行调整。 - 预测步骤 :通过系统模型函数
f(x, u)预测下一时刻状态xhatminus。然后计算系统的雅克比矩阵F,用于近似非线性系统的线性化,进而更新预测协方差P_minus。 - 更新步骤 :利用观测函数
h(x)计算预测观测值y,并计算观测雅克比矩阵H。通过卡尔曼增益K的计算,结合实际观测值z对预测状态进行更新,同时更新估计协方差P。
无迹卡尔曼滤波(UKF)
UKF原理简述
UKF则是采用确定性采样策略,通过一组Sigma点来近似非线性系统的概率分布,相较于EKF,它在处理高度非线性系统时可能具有更好的性能。
代码实现示例(Matlab)
matlab
% 假设已经有了系统模型函数f(x, u)和观测函数h(x)
% 初始化参数
x_hat = zeros(n, 1); % 初始状态估计
P = eye(n); % 初始估计协方差
Q = Q_matrix; % 过程噪声协方差
R = R_matrix; % 观测噪声协方差
lambda = alpha^2 * (n + kappa) - n; % UKF参数计算
Wm = [lambda / (n + lambda), 0.5 / (n + lambda) * ones(1, 2 * n)]; % 均值权重
Wc = [lambda / (n + lambda) + (1 - alpha^2 + beta), 0.5 / (n + lambda) * ones(1, 2 * n)]; % 协方差权重
for k = 1:num_steps
% 产生Sigma点
X = [x_hat, x_hat + chol((n + lambda) * P)', x_hat - chol((n + lambda) * P)'];
% 预测步骤
X_minus = zeros(n, 2 * n + 1);
for i = 1:2 * n + 1
X_minus(:, i) = f(X(:, i), u(:, k));
end
x_hat_minus = Wm * X_minus;
P_minus = zeros(n, n);
for i = 1:2 * n + 1
P_minus = P_minus + Wc(i) * (X_minus(:, i) - x_hat_minus) * (X_minus(:, i) - x_hat_minus)';
end
P_minus = P_minus + Q;
% 更新步骤
Y = zeros(m, 2 * n + 1);
for i = 1:2 * n + 1
Y(:, i) = h(X_minus(:, i));
end
y_hat = Wm * Y;
P_yy = zeros(m, m);
P_xy = zeros(n, m);
for i = 1:2 * n + 1
P_yy = P_yy + Wc(i) * (Y(:, i) - y_hat) * (Y(:, i) - y_hat)';
P_xy = P_xy + Wc(i) * (X_minus(:, i) - x_hat_minus) * (Y(:, i) - y_hat)';
end
P_yy = P_yy + R;
K = P_xy / P_yy;
x_hat = x_hat_minus + K * (z(:, k) - y_hat);
P = P_minus - K * P_yy * K';
end代码分析
- 初始化部分 :同样先初始化状态估计、估计协方差、噪声协方差等。这里还计算了UKF特有的参数
lambda,以及均值权重Wm和协方差权重Wc,这些参数决定了Sigma点的分布和权重分配。 - 产生Sigma点 :根据当前状态估计和协方差,通过Cholesky分解产生一组Sigma点
X,这些点能够更好地近似非线性系统的概率分布。 - 预测步骤 :将Sigma点通过系统模型函数
f(x, u)得到预测的Sigma点Xminus*,进而计算预测状态x*hatminus**和预测协方差Pminus,并考虑过程噪声Q。 - 更新步骤 :将预测的Sigma点通过观测函数
h(x)得到预测观测值Y,计算预测观测均值yhat*,以及交叉协方差P*xy和观测协方差P_yy。通过卡尔曼增益K的计算,结合实际观测值z对预测状态进行更新,同时更新估计协方差P。
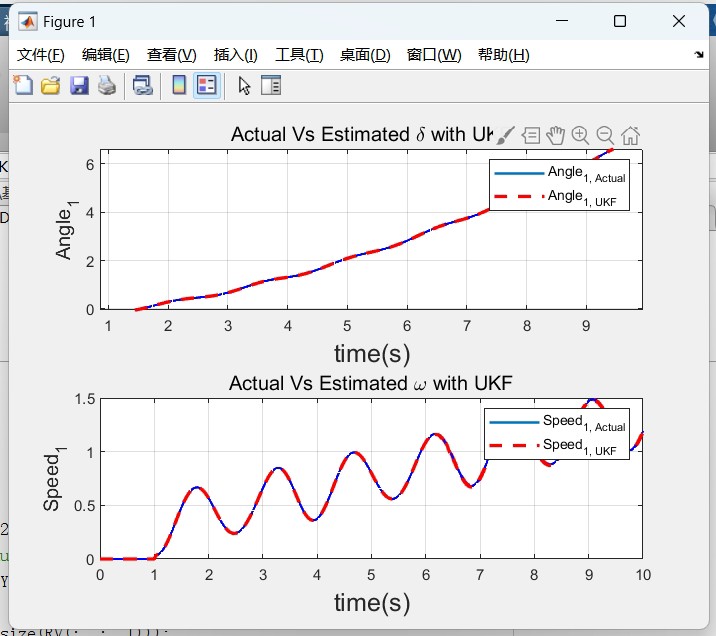
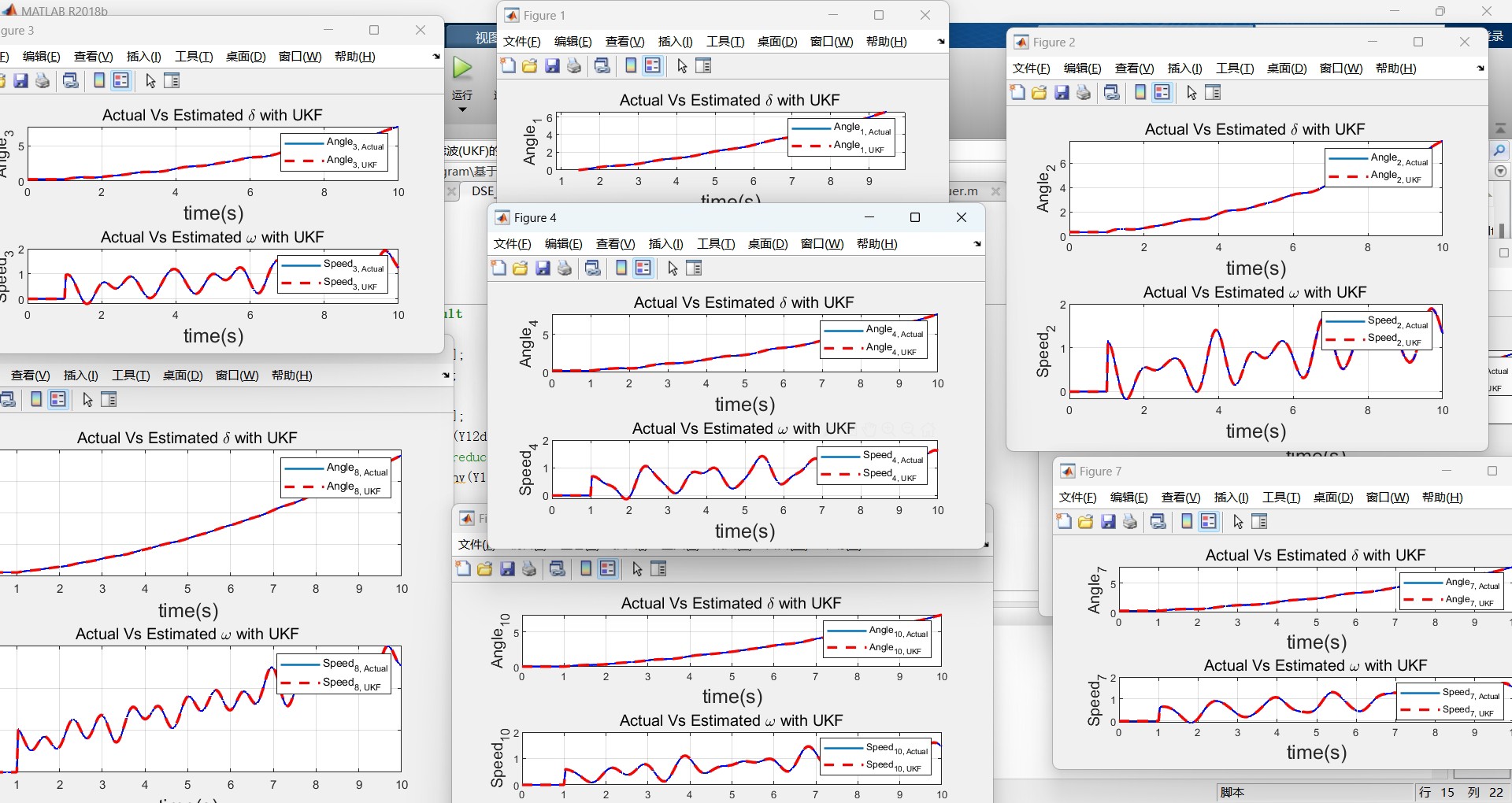
通过以39节点系统为算例,利用上述EKF和UKF方法进行动态状态估计,验证了这两种方法在电力系统状态估计中的有效性。这不仅有助于我们更好地理解电力系统的运行动态,也为实际工程应用提供了理论和方法支持。希望大家在复现过程中能进一步探索和优化这些算法,为电力系统的发展贡献自己的力量。