江科大的课程详细丰富,所以这里开始记录课程的内容知识点还有补充,可以更好用来复习和学习
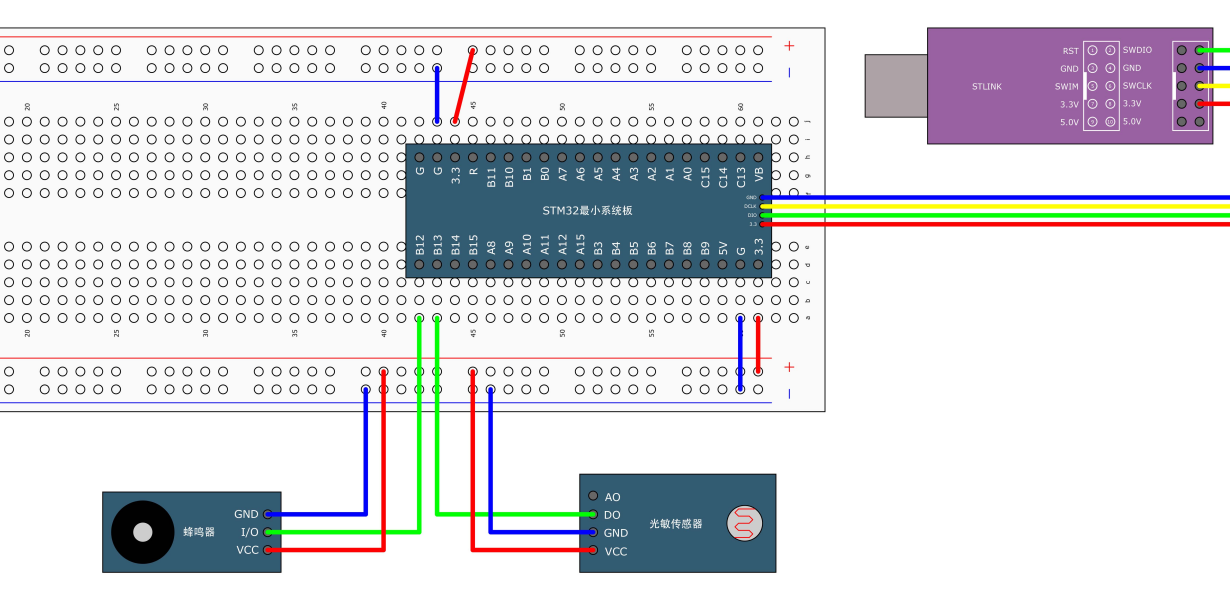
老规矩先上代码和连线图然后看最下面的解释
Buzzer.h
cs
#ifndef __BUZZER_H
#define __BUZZER_H
void Buzzer_Init(void);
void Buzzer_ON(void);
void Buzzer_OFF(void);
void Buzzer_Turn(void);
#endifBuzzer.c
cs
#include "stm32f10x.h" // Device header
void Buzzer_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//GPIOB模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_12); //让蜂鸣器处于高电平状态先让他不响
}
void Buzzer_ON(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
}
void Buzzer_OFF(void)
{
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
void Buzzer_Turn(void) //这个只是补充,我们不用这个函数
{
if (GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_12) == 0) //这个函数的作用是读出输出引脚pin12的状态,如果是0也就是低电平模式就是要响了
{
GPIO_SetBits(GPIOB, GPIO_Pin_12); //那就取反让他不响
}
else
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
}
}Lightsensor.h
cs
#ifndef __LIGHT_SENSOR_H
#define __LIGHT_SENSOR_H
void LightSensor_Init(void);
uint8_t LightSensor_Get(void);
#endifLightsensor.c
cs
#include "stm32f10x.h" // Device header
void LightSensor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
uint8_t LightSensor_Get(void)
{
return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13); //读出输入到光敏传感器的信息然后return
}main.c
cs
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"
int main(void)
{
Buzzer_Init();
LightSensor_Init();
while (1)
{
if (LightSensor_Get() == 1) //如果读取到是1,那就是光被挡住了,蜂鸣器响
{
Buzzer_ON();
}
else
{
Buzzer_OFF();
}
}
}看起来代码非常多,其实没有多少,分析一下就可以得到想要的效果
我们这个代码的效果就是当光敏传感器光线被挡住就会发去声音,不遮住就不会响
我们首先看主函数,先是定义了Buzzer和Lightsensor两个函数,这个时候我们就要回到函数里面了解内容,了解之后看主函数的解释就可以了