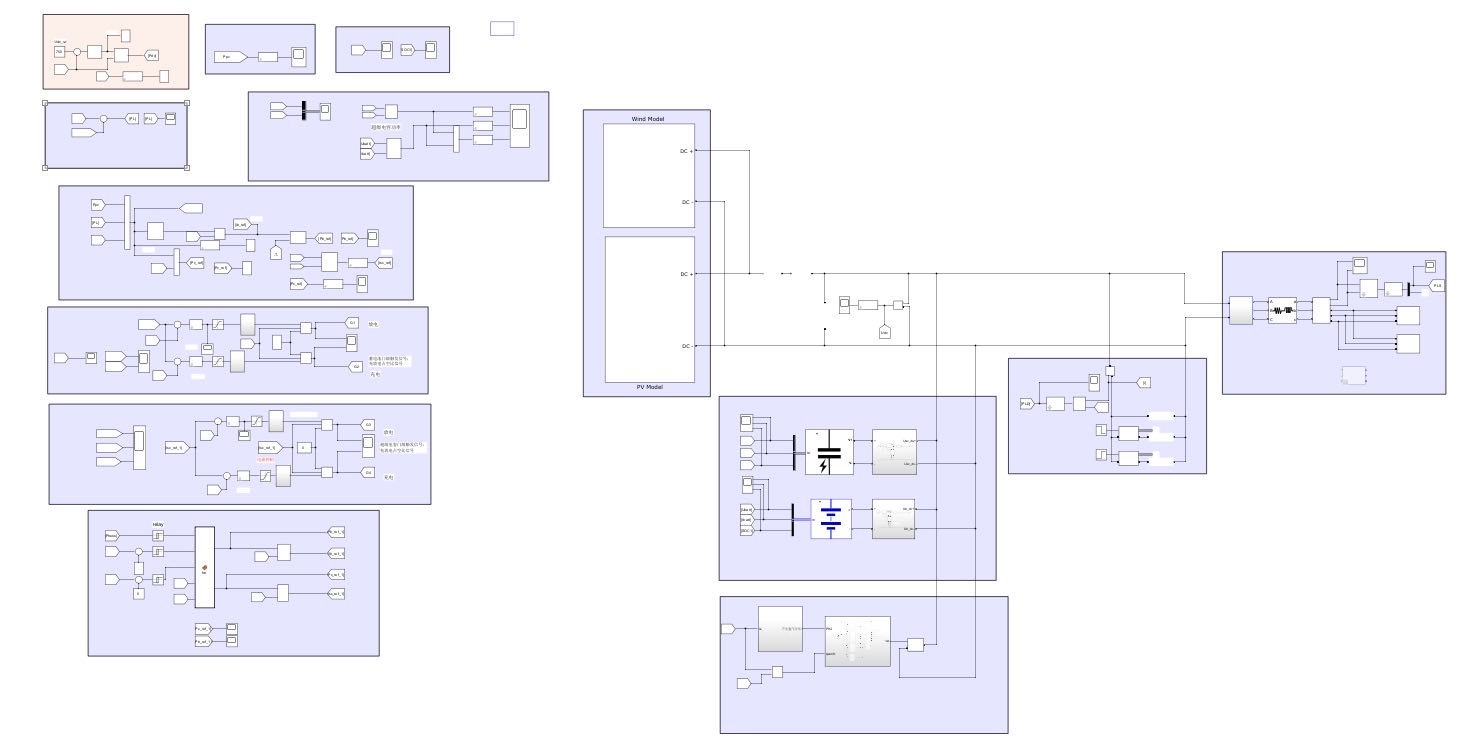
Matlab/Simulink建模仿真 光储系统、永磁同步发电机、抽水蓄能、光伏发电、pemfc、锂离子电池、电解槽系统、逆变器、fuzzy模糊控制、柴油机、小车倒立摆模型、三轮车悬挂模型、飞轮储能、高压输电、直扩通信系统、汽轮机、多模块耦合互补发电等系统构建 本人亲自建模,保真保售后 想要的话点击"加好友"加好友我吧
在工程和科研领域,Matlab/Simulink 就像是一把神奇的瑞士军刀,能帮助我们快速搭建各种复杂系统的模型并进行仿真。今天就来聊聊我在 Matlab/Simulink 中搭建那些五花八门系统模型的经历。
能源相关系统建模
光储系统
光储系统融合了光伏发电与储能,是实现可持续能源稳定供应的关键。在 Simulink 里搭建光储系统模型,我们可以先从光伏电池模块入手。
matlab
% 简单的光伏电池功率计算代码示例
function Ppv = pv_power(Vpv, Ipv)
Ppv = Vpv * Ipv;
end这段代码就是简单计算光伏电池输出功率,功率等于电压乘以电流。在 Simulink 模型中,我们将这个计算逻辑用模块搭建出来,结合光照强度、温度等外部变量对光伏电池输出特性的影响模型,就能更真实地模拟光伏电池在不同环境下的发电情况。
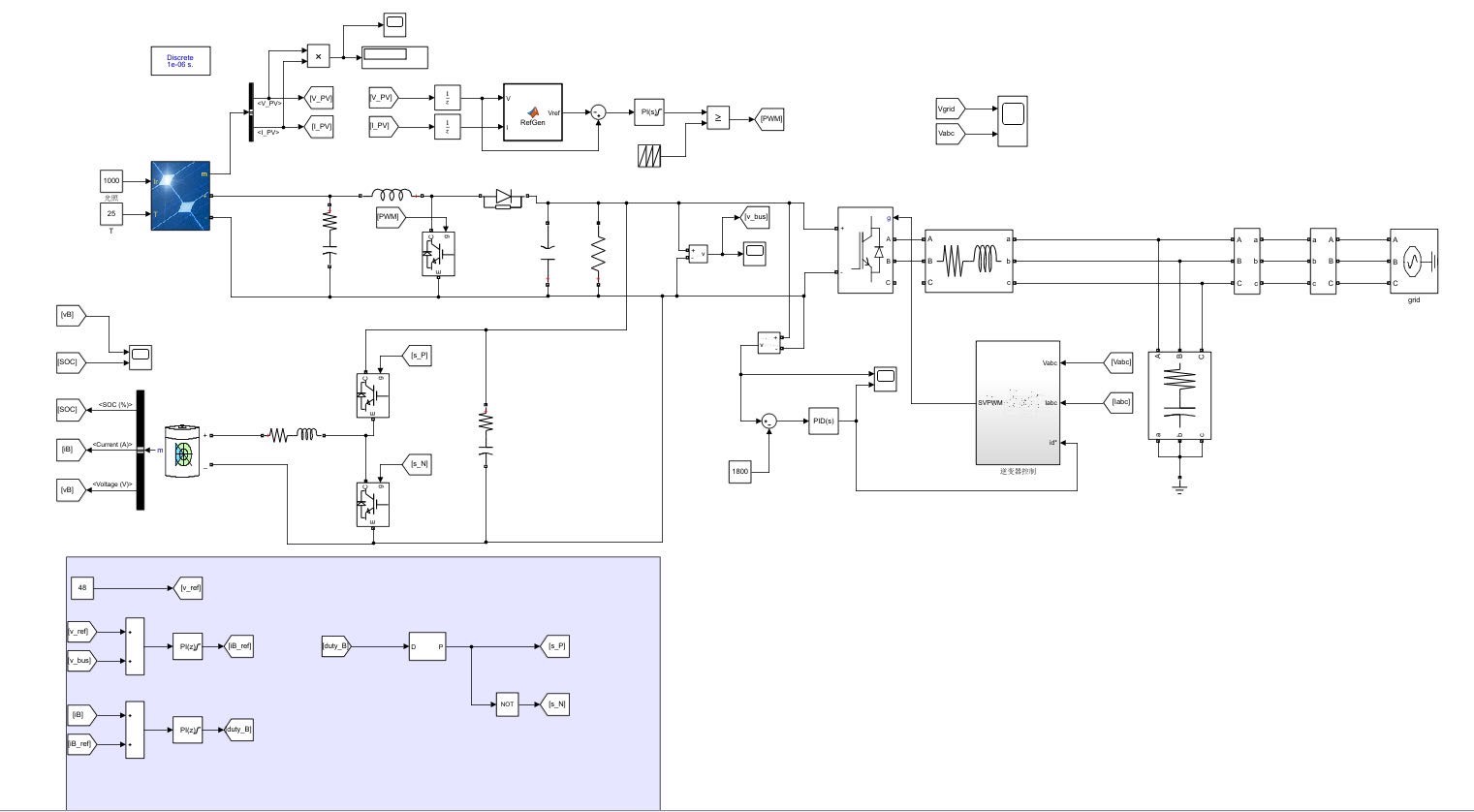
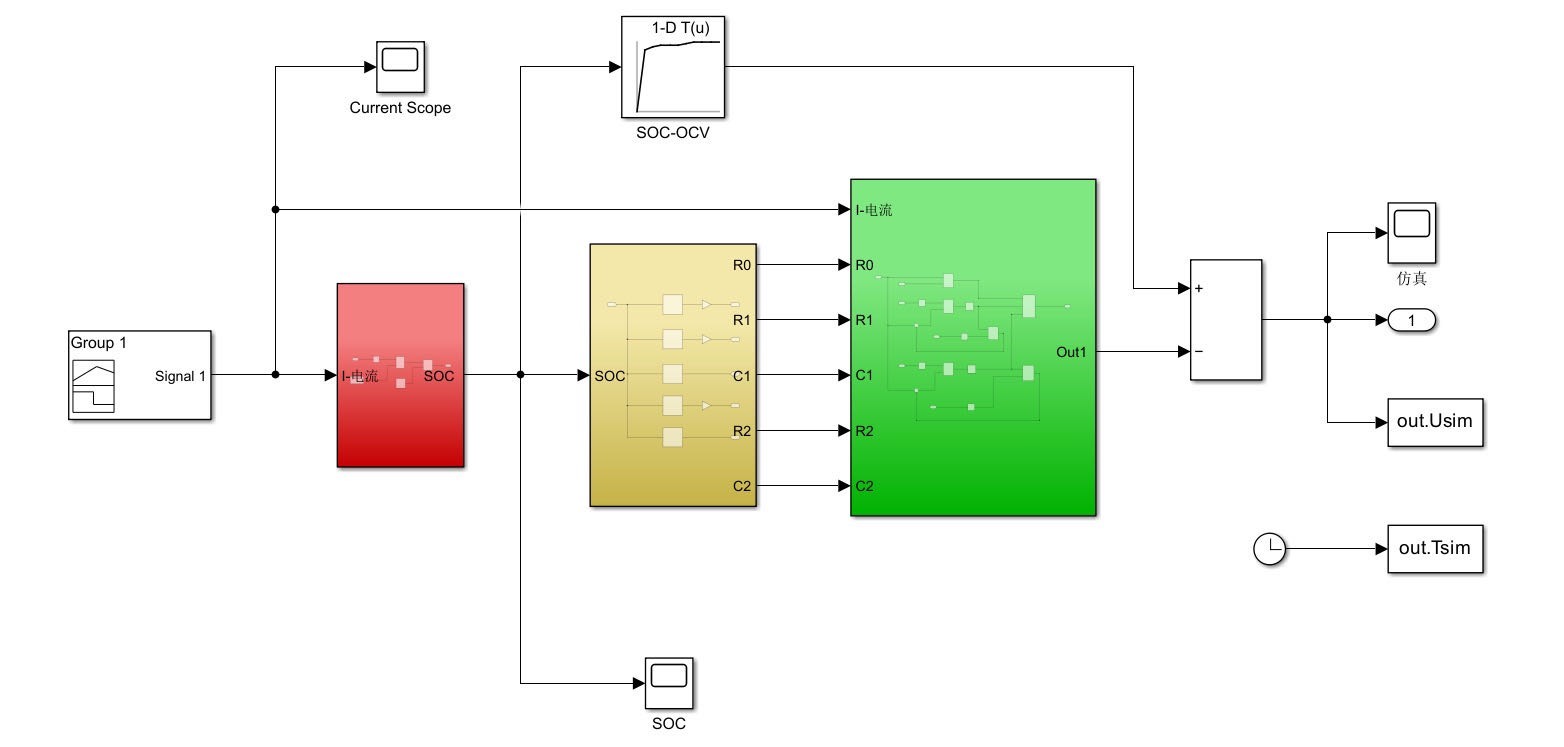
储能部分,以锂离子电池为例。锂离子电池的充放电特性建模需要考虑诸如电池容量、内阻、SOC(荷电状态)等参数。
matlab
% SOC 计算简单代码
function SOC = calculate_SOC(SOC0, I, dt, Q)
SOC = SOC0 - (I * dt) / Q;
if SOC < 0
SOC = 0;
elseif SOC > 1
SOC = 1;
end
end这段代码根据初始 SOC、充放电电流、时间步长以及电池容量来计算新的 SOC。在 Simulink 里,我们将这些计算逻辑用模块组合起来,构建完整的锂离子电池充放电模型。最后将光伏电池与锂离子电池模型结合,加上功率管理模块,一个光储系统模型就初步成型啦。
抽水蓄能与飞轮储能
抽水蓄能是大规模储能的重要方式。在 Simulink 建模时,要考虑水泵、水轮机、水库水位变化等因素。例如水泵提升水的流量可以通过如下简单代码示意:
matlab
function Q = pump_flowrate(P, rho, g, H)
% P 是水泵功率,rho 是水密度,g 重力加速度,H 扬程
Q = P / (rho * g * H);
end这段代码根据水泵输入功率、水的物理参数和扬程计算抽水流量。在模型中,将这些关系用模块表示,并结合水轮机发电模块以及水库动态水位变化模块,就能构建出抽水蓄能系统模型。
飞轮储能则主要关注飞轮的转动惯量、电机的能量转换等。
matlab
% 计算飞轮动能代码
function E = flywheel_energy(J, omega)
% J 是转动惯量,omega 是角速度
E = 0.5 * J * omega^2;
end通过在 Simulink 中搭建相应模块,实现对飞轮储能系统充能、放能过程的模拟。
发电相关系统建模
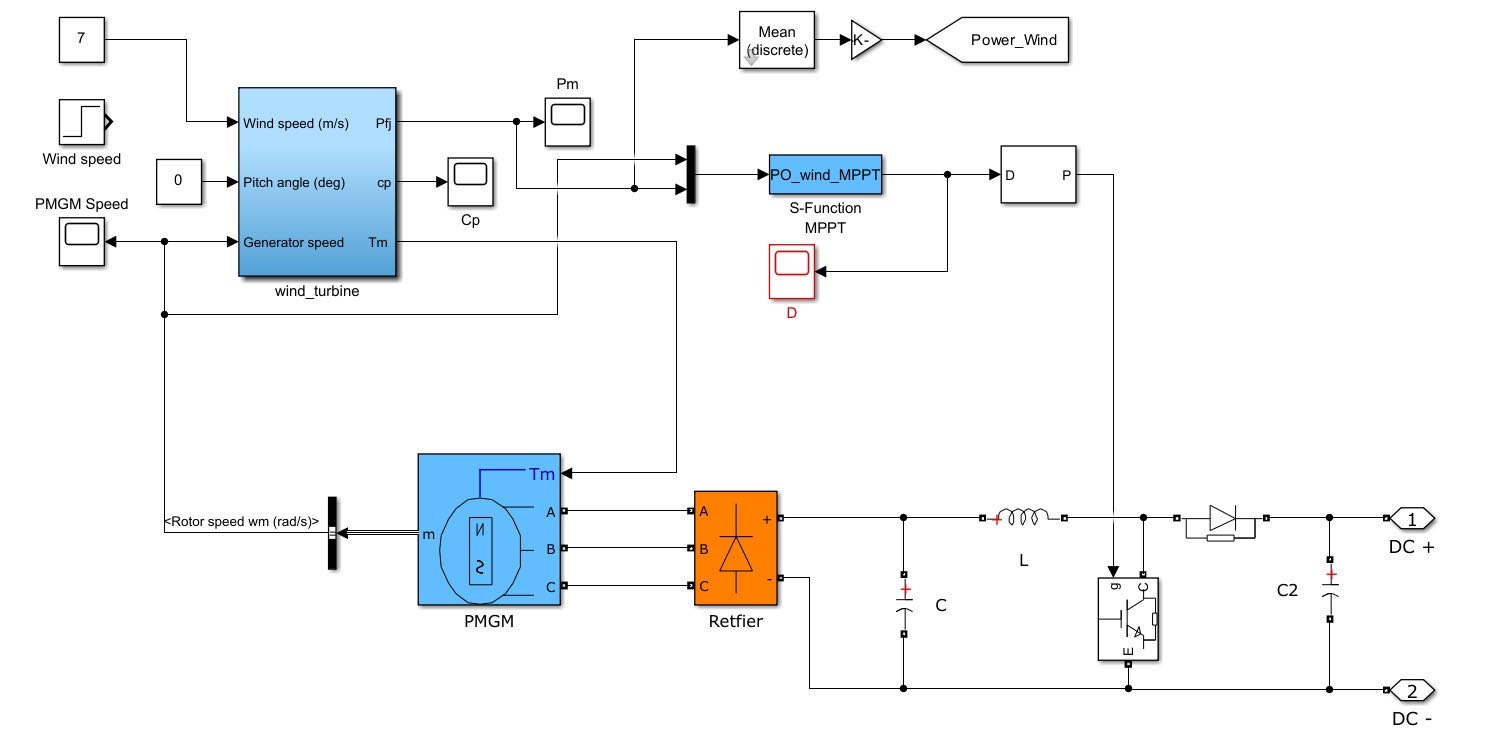
永磁同步发电机与多模块耦合互补发电
永磁同步发电机是许多发电系统中的核心部件。在 Simulink 里建模,要考虑电机的电磁关系、机械运动方程等。
matlab
% 永磁同步发电机电磁转矩简单计算代码
function Te = electromagnetic_torque(p, psi_f, id, iq)
% p 是极对数,psi_f 是永磁体磁链,id、iq 是 d、q 轴电流
Te = 1.5 * p * psi_f * iq;
end这段代码计算永磁同步发电机的电磁转矩。在模型搭建中,将电磁转矩计算模块与电机机械运动模块(如转动惯量、负载转矩等)结合,就能模拟永磁同步发电机的运行。
多模块耦合互补发电,比如将光伏发电、风力发电(永磁同步发电机常用于风力发电)、柴油机发电等多种发电方式结合起来。通过设计合理的功率分配策略,在 Simulink 中把各个发电模块以及功率管理模块连接起来,实现多能源互补稳定供电的模拟。
汽轮机
汽轮机建模要考虑蒸汽流量、压力、温度与汽轮机输出功率、转速之间的复杂关系。
matlab
% 简单的汽轮机功率计算示意代码
function P = turbine_power(m, h1, h2)
% m 是蒸汽质量流量,h1、h2 分别是进、出口蒸汽焓值
P = m * (h1 - h2);
end在 Simulink 模型里,通过搭建一系列模块来描述蒸汽在汽轮机内的热力过程以及与机械输出的耦合关系,模拟汽轮机在不同工况下的运行。
其他有趣模型搭建
小车倒立摆与三轮车悬挂模型
小车倒立摆模型是经典的控制理论验证平台。在 Simulink 里,我们先建立小车与倒立摆的动力学方程。
matlab
% 简单的小车倒立摆动力学方程代码片段(示意)
function [dxdt] = pendulum_dynamics(t, x, u, m, M, l, g)
% x 是状态变量 [theta, dtheta, x, dx],u 是控制力,m 摆锤质量,M 小车质量等
theta = x(1);
dtheta = x(2);
x_pos = x(3);
dx_pos = x(4);
num1 = m * l * dtheta^2 * sin(theta) + u;
den1 = M + m - m * cos(theta)^2;
dxdt1 = dx_pos;
dxdt2 = (g * sin(theta) - cos(theta) * num1 / den1) / (l * (4/3 - m * cos(theta)^2 / den1));
dxdt3 = num1 / den1;
dxdt4 = dxdt2 * cos(theta) - dtheta^2 * sin(theta);
dxdt = [dxdt1; dxdt2; dxdt3; dxdt4];
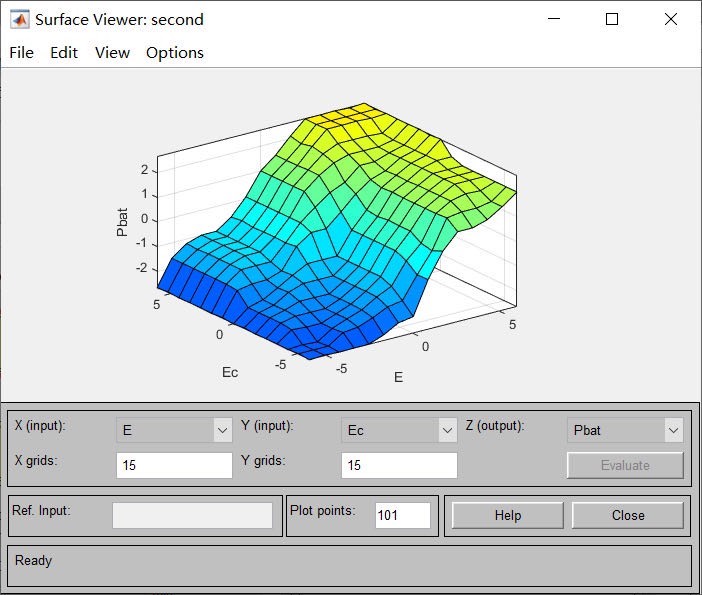
end通过这段代码描述的动力学关系,在 Simulink 里用模块搭建出小车倒立摆模型,再设计控制器(比如用 fuzzy 模糊控制)就能实现对倒立摆的稳定控制模拟。
三轮车悬挂模型则侧重于模拟车辆在不同路面状况下,悬挂系统对车辆行驶稳定性和舒适性的影响。通过建立悬挂系统的力学模型,如弹簧、阻尼的受力与变形关系等,在 Simulink 中搭建模块实现对三轮车行驶过程的模拟。
直扩通信系统
直扩通信系统在 Simulink 建模中,涉及到信号的扩频、调制、传输以及解扩解调等过程。
matlab
% 简单的 BPSK 调制代码示例
function y = BPSK_modulate(x)
y = 2 * x - 1; % x 是二进制信号,0 变为 -1,1 变为 1
end这段代码实现简单的 BPSK 调制。在 Simulink 里,将扩频码生成模块、BPSK 调制模块、信道模块以及解扩解调模块等依次连接,就能搭建出直扩通信系统模型,观察信号在各个环节的变化以及系统的误码性能等。
以上就是我在 Matlab/Simulink 中搭建各种系统模型的一些经验和心得。本人亲自建模,保真保售后,如果对这些模型感兴趣,想要进一步了解或者获取模型,点击"加好友"加我好友吧,咱们一起探讨更多有趣的模型搭建技巧!