三相逆变器VOC矢量控制电力电子Matlab仿真simulink
在电力电子领域,三相逆变器的矢量控制是一项至关重要的技术,而通过Matlab的Simulink进行仿真,能让我们更直观地理解和优化这一过程。今天就来和大家唠唠三相逆变器VOC(Voltage Oriented Control,电压定向控制)矢量控制在Simulink中的仿真实现。
为啥要用VOC矢量控制
简单来说,三相逆变器的任务是将直流电转换为三相交流电。而VOC矢量控制能够实现对交流电机的高性能控制,通过将定子电流解耦为励磁电流和转矩电流,就像给电机的控制安上了"精准导航",可以分别独立地控制电机的磁通和转矩,大大提高了系统的动态性能和稳态精度。
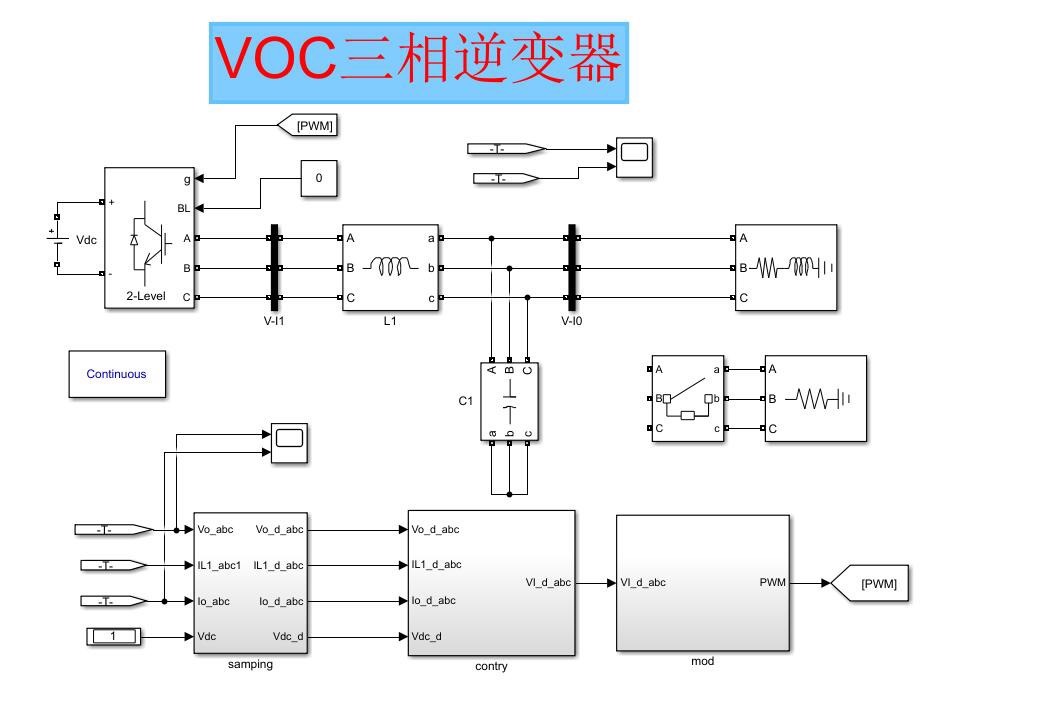
Simulink仿真模型搭建
主电路部分
首先搭建三相逆变器的主电路。在Simulink库中找到"Power Systems"模块组,从中拖出"Three - Phase Voltage Source Inverter"模块,这就是我们的三相逆变器本体啦。它需要输入直流电压,输出就是三相交流电压。比如:
matlab
% 假设直流电压为700V
Vdc = 700; 这里设置的 Vdc 就是逆变器的直流输入电压,这个数值会直接影响到输出交流电压的幅值。
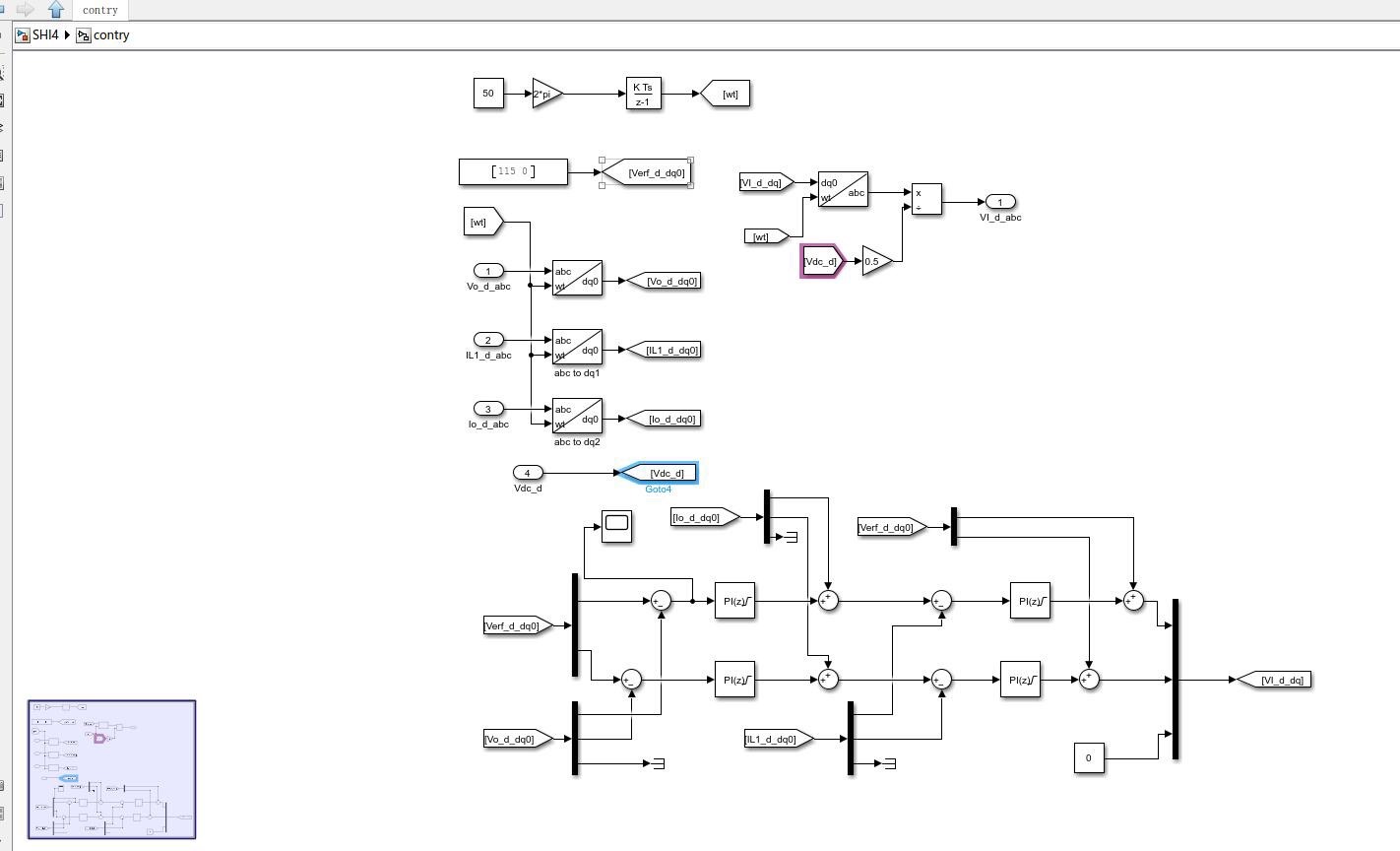
控制策略部分
- 坐标变换:VOC矢量控制离不开坐标变换,主要包括Clark变换和Park变换。以Clark变换为例,从三相静止坐标系(abc)变换到两相静止坐标系(αβ),其变换矩阵为:
\[ C_{abc \to \alpha\beta}=\begin{bmatrix}
1 & -\frac{1}{2} & -\frac{1}{2}\\
0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2}
\end{bmatrix} \]
在Simulink中,可以自己搭建一个实现该变换的子系统,也可以使用现成的模块。如果自己搭建,代码实现可能类似这样(假设输入是三相电流 ia、ib、ic):
matlab
function [i_alpha, i_beta] = clark_transform(ia, ib, ic)
C = [1, -0.5, -0.5; 0, sqrt(3)/2, -sqrt(3)/2];
i_abc = [ia; ib; ic];
i_alpha_beta = C * i_abc;
i_alpha = i_alpha_beta(1);
i_beta = i_alpha_beta(2);
end这段代码就是根据Clark变换矩阵来实现三相电流到两相电流的转换,ialpha**和 i beta 就是变换后的两相电流。
- 电流环控制:这部分是为了跟踪给定电流。通常采用PI调节器,在Simulink里添加"PI Controller"模块。PI调节器的传递函数为:
\ G*{PI}(s)=K*p+\\frac{K_i}{s} \\
其中 \( Kp \) 是比例系数, \( K i \) 是积分系数。代码实现PI调节(假设输入是电流误差 error):
matlab
function output = pi_controller(error, Kp, Ki, Ts, integral)
P_term = Kp * error;
integral = integral + error * Ts;
I_term = Ki * integral;
output = P_term + I_term;
% 返回输出以及更新后的积分值
[output, integral] = deal(output, integral);
end这里通过不断调整比例项和积分项,让实际电流快速跟踪给定电流。
- 电压定向部分:要实现VOC,关键是确定电压矢量的方向。通常以电网电压矢量为参考,通过锁相环(PLL)来获取电网电压的相位信息。在Simulink里有专门的"Phase - Locked Loop"模块来实现。它输出的相位信息会用于后续的Park变换等操作,确保控制的准确性。
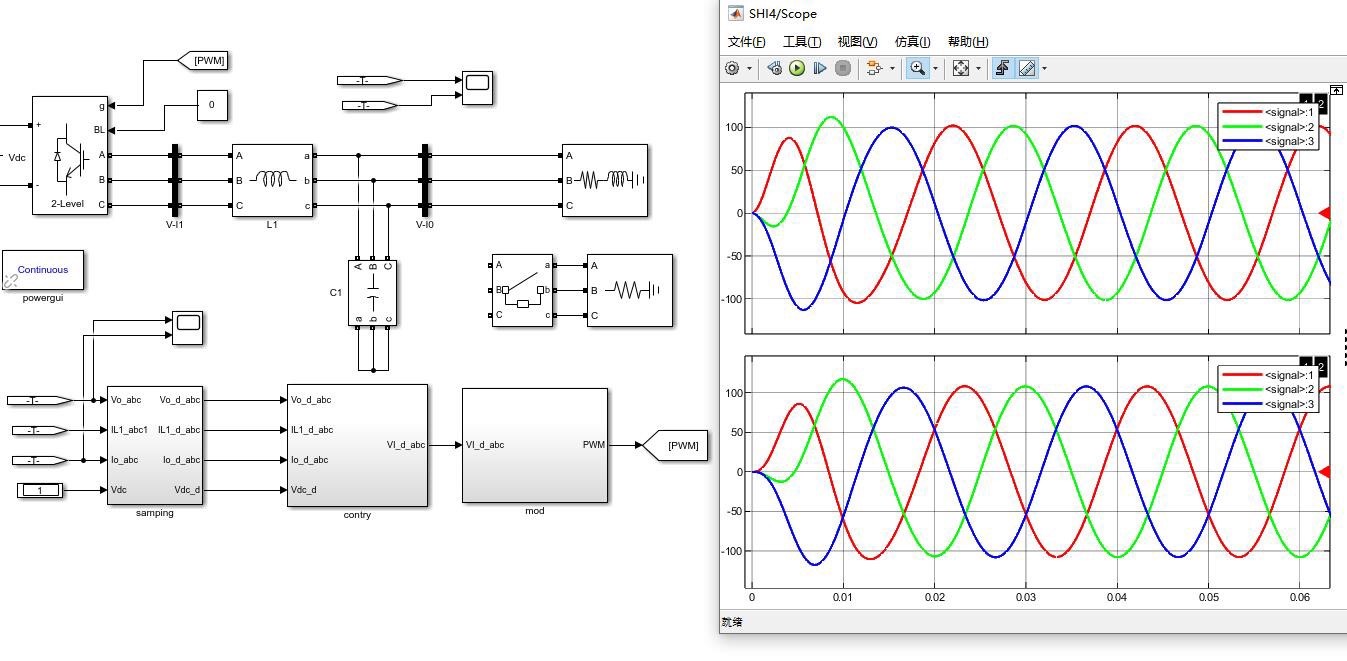
仿真结果分析
搭建好整个模型后,运行仿真。我们可以观察到三相逆变器输出的交流电压波形,以及电机电流等关键参数。如果一切正常,输出的三相电压应该是正弦波,且幅值和频率符合预期。例如,通过示波器模块观察输出电压波形,如果波形出现畸变,那就得检查是不是参数设置有误,比如PI参数不合适,或者坐标变换部分出现问题。
通过这样在Simulink中的仿真实践,我们可以深入理解三相逆变器VOC矢量控制的原理和实现细节,并且能够根据实际需求灵活调整参数,优化系统性能。希望大家都能在这个有趣的电力电子仿真世界里玩得开心,收获满满!