1.实验内容
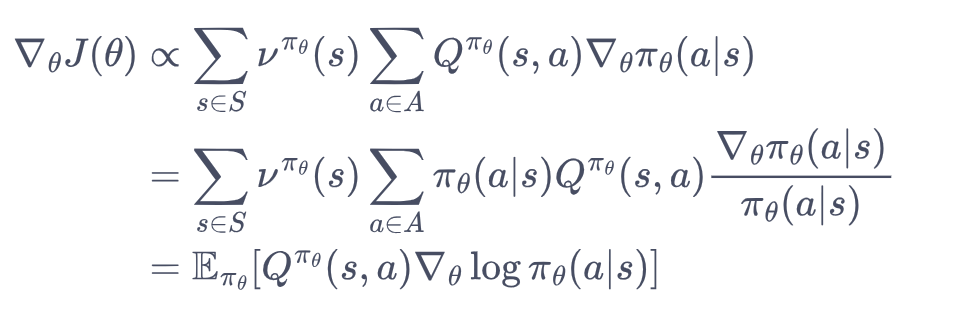
策略梯度算法文章中2.2 策略梯度算法。
通俗总结
① 优胜劣汰
② 学如逆水行舟,不进则退。
2.实验目标
2.1 构建策略模型
python
class PolicyNet(torch.nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(PolicyNet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, action_dim)
# 输入就是state, 输出就是一个action分布
def forward(self, x):
x = F.relu(self.fc1(x))
x = self.fc2(x)
return F.softmax(x, dim=1)2.2 目标函数 及其 loss函数
loss = -微分对象=-Q*log概率
python
def update(self, transition_dict):
state_list = transition_dict['states']
action_list = transition_dict['actions']
reward_list = transition_dict['rewards']
# 每个episode为单位, 计算动作价值的累计收益
G = 0
# 倒放数据,计算动作的累计收益
self.optimizer.zero_grad()
for i in range(len(reward_list)-1, -1, -1):
state = torch.tensor([state_list[i]]).to(self.device)
action = torch.tensor([action_list[i]]).view(-1, 1).to(self.device)
G = reward_list[i] + self.gamma*G
logP = torch.log(self.policy_net(state).gather(1, action))
loss = -G*logP
loss.backward()
self.optimizer.step()2.3 思考算法的优缺点
a、仅使用sar数据,可能会限制算法的能力上线
b、无偏,但是方差比较大
3.完整代码
见附件
4.实验结果
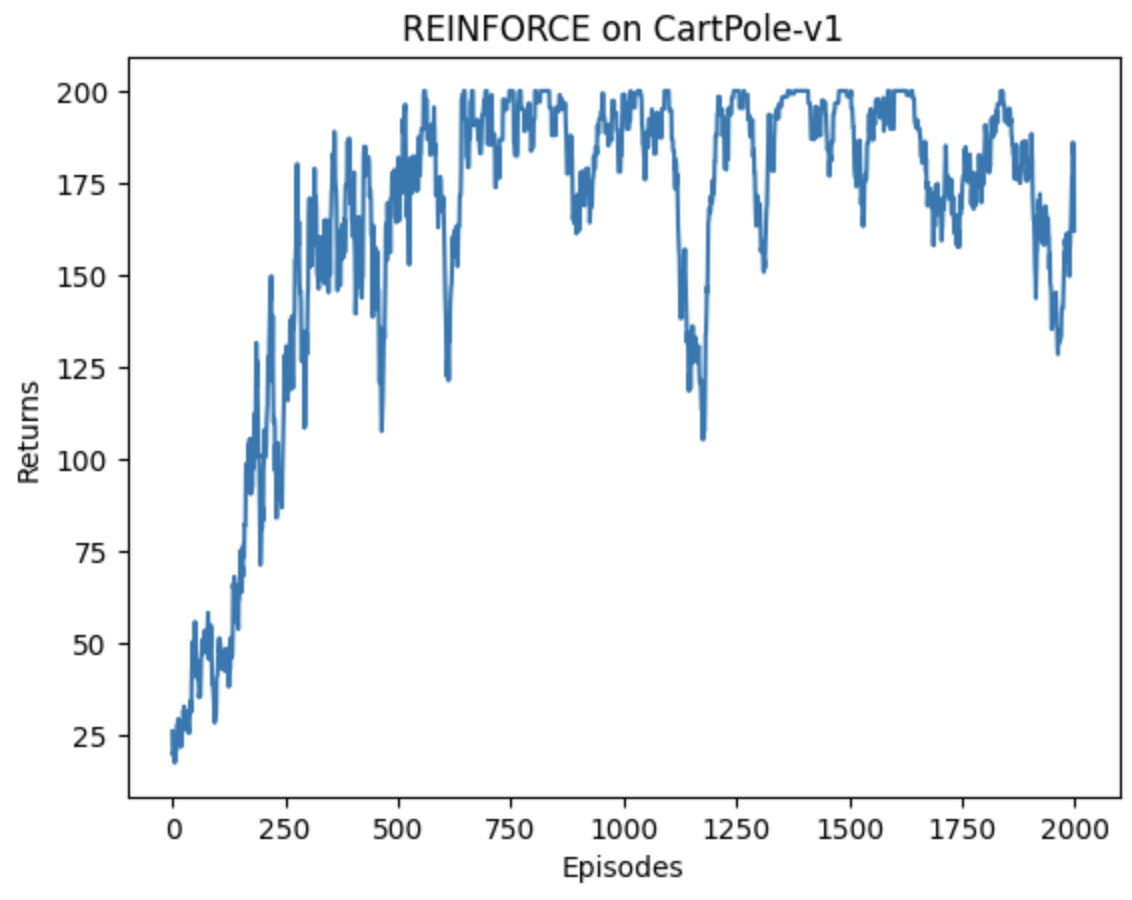
模型训练750个epoch接近收敛,而后震荡收敛。
尝试扩大epoch,效果如下:
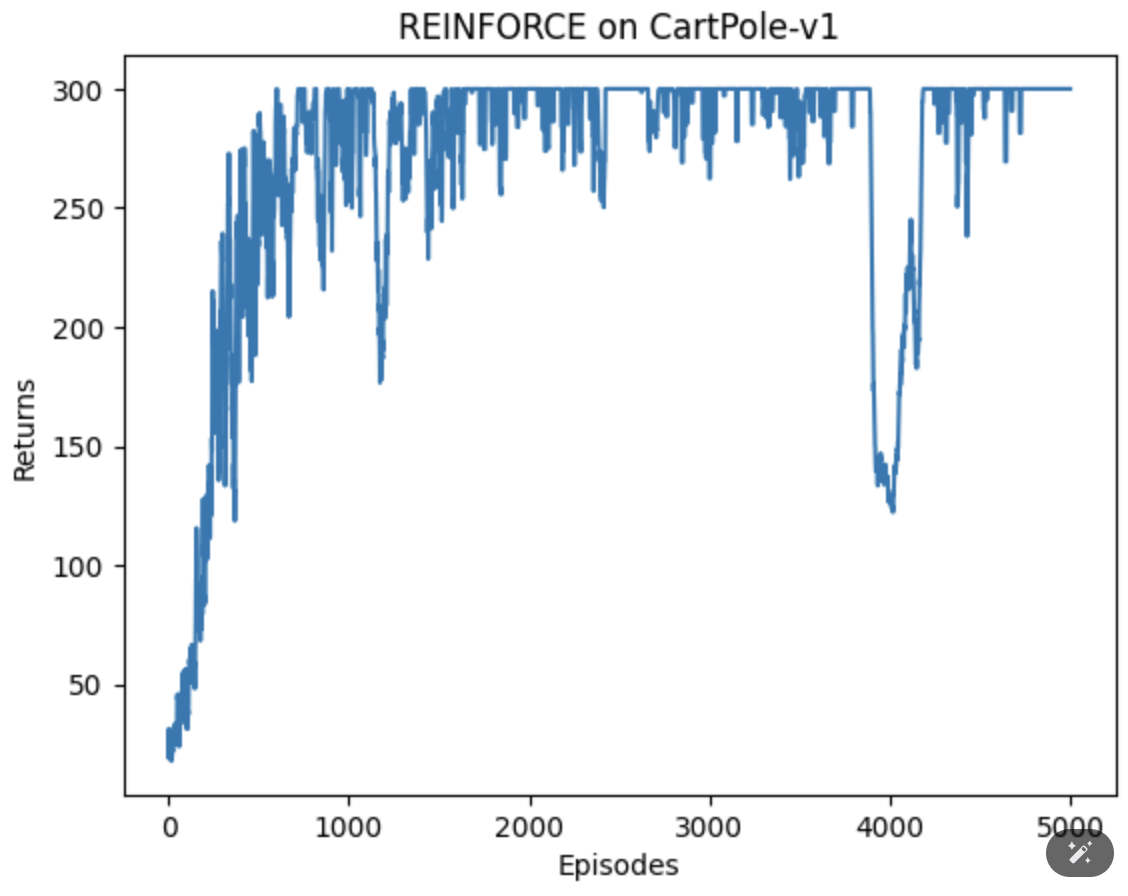
结论:总的来说,可以收敛,但是收敛效果并不是很好,后续和AC算法做一下对比。
有没有小伙伴知道为啥后期收敛效果不好?欢迎评论指教。