通过i_α和i_β估计反电势e_α和e_β
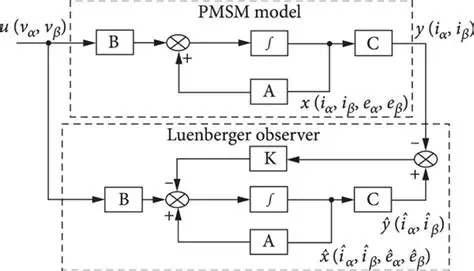
一、龙博格观测器简介
龙博格观测器,一种典型的全维状态观测器,依赖系统的输出状态与搭建的状态误差收敛状态对状态进行观测
假设一个系统为:
{ x ˙ = A x + B u y = C x \left\{ \begin{aligned} \dot{x} &= A x + B u \\ y &= C x \end{aligned} \right. {x˙y=Ax+Bu=Cx
根据框图格式,构建观测器如下(K为增益):
{ x ^ ˙ = A x ^ + B u + K ( y − y ^ ) y ^ = C x ^ \left\{ \begin{aligned} \dot{\hat{x}} &= A \hat{x} + B u+K(y-\hat{y}) \\ \hat{y} &= C \hat{x} \end{aligned} \right. {x^˙y^=Ax^+Bu+K(y−y^)=Cx^
进一步,即状态x的观测值为:
x ^ ˙ = ( A − K C ) x ^ + B u + K y (式 1 ) \ \dot{\hat{x}}= (A-KC) \hat{x} + B u+Ky \ (式1) x^˙=(A−KC)x^+Bu+Ky (式1)
进一步,离散化后状态x为:
x ^ ( k + 1 ) = ( A − K C ) x \^ ( k ) + B u ( k ) + K y ( k ) ∗ T s + x ^ ( k ) \ {\hat{x}(k+1)}= (A-KC) \\hat{x}(k) + B u(k)+Ky (k) *T_s+\hat{x}(k)\ x^(k+1)=(A−KC)x\^(k)+Bu(k)+Ky(k)∗Ts+x^(k)
在PMSM控制中,我们通过对输出状态 i a \ i_a ia 和 i β \ i_β iβ 的追踪实现对反电动势 e a \ e_a ea 与 e a \ e_a ea 的观测,进而通过PLL可以提取PMSM的转子信息
二、状态变量推导
表贴式PMSM两相静止坐标系下电压方程:
{ u α = R s i α + L s d i α d t + e α u β = R s i β + L s d i β d t + e β \left\{ \begin{aligned} u_{\alpha} &= R_s i_{\alpha} + L_s \frac{di_{\alpha}}{dt} + e_{\alpha} \\ u_{\beta} &= R_s i_{\beta} + L_s \frac{di_{\beta}}{dt} + e_{\beta} \end{aligned} \right. ⎩ ⎨ ⎧uαuβ=Rsiα+Lsdtdiα+eα=Rsiβ+Lsdtdiβ+eβ
其中,反电动势为:
{ e α = − ω r ψ f sin ( θ r ) e β = ω r ψ f cos ( θ r ) \left\{ \begin{aligned} e_{\alpha} = -\omega_{r} \psi_{f} \sin \left( \theta_{r} \right) \\ e_{\beta} = \omega_{r} \psi_{f} \cos \left( \theta_{r} \right) \end{aligned} \right. {eα=−ωrψfsin(θr)eβ=ωrψfcos(θr)
其中, ω r \ \omega_{r} ωr为电角度、 θ r \ \theta_{r} θr为转子位置、 ψ f \ \psi_{f} ψf为永磁体磁链
由假设近似: ω r ˙ = 0 \ \dot{ \omega_{r} }=0 ωr˙=0 , d θ r d t = ω r \ \frac{d\theta_r}{dt} = \omega_r dtdθr=ωr从电压方程解出电流导数和反电势导数:
d i α d t = 1 L s ( u α − R s i α − e α ) \frac{di_{\alpha}}{dt} = \frac{1}{L_s}(u_{\alpha} - R_s i_{\alpha} - e_{\alpha}) dtdiα=Ls1(uα−Rsiα−eα)
d i β d t = 1 L s ( u β − R s i β − e β ) \frac{di_{\beta}}{dt} = \frac{1}{L_s}(u_{\beta} - R_s i_{\beta} - e_{\beta}) dtdiβ=Ls1(uβ−Rsiβ−eβ)
d e α d t = d d t ( − ω r ψ f sin ( θ r ) ) = − ω r d d t ( ψ f sin ( θ r ) ) ≈ − ω r e β \frac{de_{\alpha}}{dt} = \frac{d}{dt} \Bigl(-\omega_{r} \psi_{f} \sin(\theta_{r}) \Bigr) = -\omega_{r} \frac{d}{dt} \Bigl( \psi_{f} \sin(\theta_{r}) \Bigr) \approx -\omega_{r} e_{\beta} dtdeα=dtd(−ωrψfsin(θr))=−ωrdtd(ψfsin(θr))≈−ωreβ
d e β d t = d d t ( ω r ψ f cos ( θ r ) ) = ω r d d t ( ψ f cos ( θ r ) ) ≈ ω r e α \frac{de_{\beta}}{dt} = \frac{d}{dt} \Bigl( \omega_{r} \psi_{f} \cos(\theta_{r}) \Bigr) = \omega_{r} \frac{d}{dt} \Bigl( \psi_{f} \cos(\theta_{r}) \Bigr) \approx \omega_{r} e_{\alpha} dtdeβ=dtd(ωrψfcos(θr))=ωrdtd(ψfcos(θr))≈ωreα
故而状态空间方程 构建如下:
状态空间方程为: d d t i α i β e α e β = − R s L s 0 − 1 L s 0 0 − R s L s 0 − 1 L s 0 0 0 − ω r 0 0 ω r 0 i α i β e α e β + 1 L s 0 0 1 L s 0 0 0 0 u α u β 0 0 \frac{d}{d t}\left\\begin{array}{c} i_{\\alpha} \\\\ i_{\\beta} \\\\ e_{\\alpha} \\\\ e_{\\beta} \\end{array}\\right = \left\\begin{array}{cccc} -\\frac{R_{s}}{L_{s}} \& 0 \& -\\frac{1}{L_{s}} \& 0 \\\\ 0 \& -\\frac{R_{s}}{L_{s}} \& 0 \& -\\frac{1}{L_{s}} \\\\ 0 \& 0 \& 0 \& -\\omega_{r} \\\\ 0 \& 0 \& \\omega_{r} \& 0 \\end{array}\\right \left\\begin{array}{c} i_{\\alpha} \\\\ i_{\\beta} \\\\ e_{\\alpha} \\\\ e_{\\beta} \\end{array}\\right + \left\\begin{array}{cc} \\frac{1}{L_{s}} \& 0 \\\\ 0 \& \\frac{1}{L_{s}} \\\\ 0 \& 0 \\\\ 0 \& 0 \\end{array}\\right \left\\begin{array}{c} u_{\\alpha} \\\\ u_{\\beta} \\\\ 0 \\\\ 0 \\end{array}\\right dtd iαiβeαeβ = −LsRs0000−LsRs00−Ls100ωr0−Ls1−ωr0 iαiβeαeβ + Ls10000Ls100 uαuβ00
输出方程为: i α i β = 1 0 0 0 0 1 0 0 i α i β e α e β \left\\begin{array}{l} i_{\\alpha} \\\\ i_{\\beta} \\end{array}\\right = \left\\begin{array}{llll} 1 \& 0 \& 0 \& 0 \\\\ 0 \& 1 \& 0 \& 0 \\end{array}\\right \left\\begin{array}{l} i_{\\alpha} \\\\ i_{\\beta} \\\\ e_{\\alpha} \\\\ e_{\\beta} \\end{array}\\right iαiβ=10010000 iαiβeαeβ
三、实现过程
仿照一、中,对上面给出的状态方程设计Lunberger观测器如下:
d d t i \^ α i \^ β e \^ α e \^ β = A i \^ α i \^ β e \^ α e \^ β + B u α u β 0 0 + K ( i α i β 0 0 − i \^ α i \^ β 0 0 ) ( 式 2 ) \frac{d}{d t}\left\\begin{array}{c} \\hat{i}_{\\alpha} \\\\ \\hat{i}_{\\beta} \\\\ \\hat{e}_{\\alpha} \\\\ \\hat{e}_{\\beta} \\end{array}\\right = \mathbf{A}\left\\begin{array}{c} \\hat{i}_{\\alpha} \\\\ \\hat{i}_{\\beta} \\\\ \\hat{e}_{\\alpha} \\\\ \\hat{e}_{\\beta} \\end{array}\\right + \mathbf{B}\left\\begin{array}{c} u_{\\alpha} \\\\ u_{\\beta} \\\\ 0 \\\\ 0 \\end{array}\\right + \mathbf{K}\left( \left\\begin{array}{c} i_{\\alpha} \\\\ i_{\\beta}\\\\0 \\\\0 \\end{array}\\right - \left\\begin{array}{c} \\hat{i}_{\\alpha} \\\\ \\hat{i}_{\\beta} \\\\0 \\\\0 \\end{array}\\right \right)(式2) dtd i^αi^βe^αe^β =A i^αi^βe^αe^β +B uαuβ00 +K iαiβ00 − i^αi^β00 (式2)
其中,系数矩阵A、B、C为:
A = − R s L s 0 − 1 L s 0 0 − R s L s 0 − 1 L s 0 0 0 − ω r 0 0 ω r 0 \mathbf{A}=\left\\begin{array}{cccc} -\\frac{R_{s}}{L_{s}} \& 0 \& -\\frac{1}{L_{s}} \& 0 \\\\ 0 \& -\\frac{R_{s}}{L_{s}} \& 0 \& -\\frac{1}{L_{s}} \\\\ 0 \& 0 \& 0 \& -\\omega_{r} \\\\ 0 \& 0 \& \\omega_{r} \& 0 \\end{array}\\right A= −LsRs0000−LsRs00−Ls100ωr0−Ls1−ωr0
B = 1 L s 0 0 1 L s 0 0 0 0 , C = 1 0 0 0 0 1 0 0 \mathbf{B}=\left\\begin{array}{cc} \\frac{1}{L_{s}} \& 0 \\\\ 0 \& \\frac{1}{L_{s}} \\\\ 0 \& 0 \\\\ 0 \& 0 \\end{array}\\right,\quad \mathbf{C}=\left\\begin{array}{cccc} 1 \& 0 \& 0 \& 0 \\\\ 0 \& 1 \& 0 \& 0 \\end{array}\\right B= Ls10000Ls100 ,C=10010000
增益矩阵为:
K = K 1 0 0 0 0 K 1 0 0 K 2 0 0 0 0 K 2 0 0 \mathbf{K} = \left \\begin{array}{cc} K_1 \& 0 \& 0\& 0\\\\ 0 \& K_1 \& 0\& 0\\\\ K_2 \& 0 \& 0\& 0\\\\ 0 \& K_2\& 0\& 0\\\\ \\end{array} \\right K= K10K200K10K200000000
其中,K1是对电流的观测增益,K2是对反电动势的观测增益
状态变量,输入矩阵,输出矩阵分别为:
x = i α i β e α e α , u = u α u β 0 0 , y = i α i β 0 0 \mathbf{x}=\left\\begin{array}{c} i_{\\alpha} \\\\ i_{\\beta} \\\\ e_{\\alpha} \\\\ e_{\\alpha} \\end{array}\\right ,\mathbf{u}=\left\\begin{array}{c} u_{\\alpha} \\\\ u_{\\beta} \\\\ 0 \\\\ 0 \\end{array}\\right ,\mathbf{y}=\left\\begin{array}{c} i_{\\alpha} \\\\ i_{\\beta} \\\\ 0 \\\\ 0 \\end{array}\\right x= iαiβeαeα ,u= uαuβ00 ,y= iαiβ00
对(式2)离散化后,得到反电动势的龙博格观测器为:
i ^ α ( k + 1 ) = i ^ α ( k ) + T − R s L s i \^ α ( k ) − 1 L s e \^ α ( k ) + 1 L s u α ( k ) + K 1 ( i α ( k ) − i \^ α ( k ) ) i ^ β ( k + 1 ) = i ^ β ( k ) + T − R s L s i \^ β ( k ) − 1 L s e \^ β ( k ) + 1 L s u β ( k ) + K 1 ( i β ( k ) − i \^ β ( k ) ) e ^ α ( k + 1 ) = e ^ α ( k ) + T − ω \^ e e \^ β ( k ) + K 2 ( i α ( k ) − i \^ α ( k ) ) e ^ β ( k + 1 ) = e ^ β ( k ) + T ω \^ e e \^ α ( k ) + K 2 ( i β ( k ) − i \^ β ( k ) ) \begin{aligned} \hat{i}{\alpha}(k+1) &= \hat{i}{\alpha}(k) + T\bigg-\\frac{R_s}{L_s}\\hat{i}_{\\alpha}(k) - \\frac{1}{L_s}\\hat{e}_{\\alpha}(k) + \\frac{1}{L_s}u_{\\alpha}(k) + K_1\\big(i_{\\alpha}(k) - \\hat{i}_{\\alpha}(k)\\big)\\bigg \\ \hat{i}{\beta}(k+1) &= \hat{i}{\beta}(k) + T\bigg-\\frac{R_s}{L_s}\\hat{i}_{\\beta}(k) - \\frac{1}{L_s}\\hat{e}_{\\beta}(k) + \\frac{1}{L_s}u_{\\beta}(k) + K_1\\big(i_{\\beta}(k) - \\hat{i}_{\\beta}(k)\\big)\\bigg \\ \hat{e}{\alpha}(k+1) &= \hat{e}{\alpha}(k) + T\bigg-\\hat{\\omega}_e \\hat{e}_{\\beta}(k) + K_2\\big(i_{\\alpha}(k) - \\hat{i}_{\\alpha}(k)\\big)\\bigg \\ \hat{e}{\beta}(k+1) &= \hat{e}{\beta}(k) + T\bigg\\,\\hat{\\omega}_e \\hat{e}_{\\alpha}(k) + K_2\\big(i_{\\beta}(k) - \\hat{i}_{\\beta}(k)\\big)\\bigg \end{aligned} i^α(k+1)i^β(k+1)e^α(k+1)e^β(k+1)=i^α(k)+T−LsRsi\^α(k)−Ls1e\^α(k)+Ls1uα(k)+K1(iα(k)−i\^α(k))=i^β(k)+T−LsRsi\^β(k)−Ls1e\^β(k)+Ls1uβ(k)+K1(iβ(k)−i\^β(k))=e^α(k)+T−ω\^ee\^β(k)+K2(iα(k)−i\^α(k))=e^β(k)+Tω\^ee\^α(k)+K2(iβ(k)−i\^β(k))
T为采样时间
四、仿真
simulink搭建仿真验证如下:
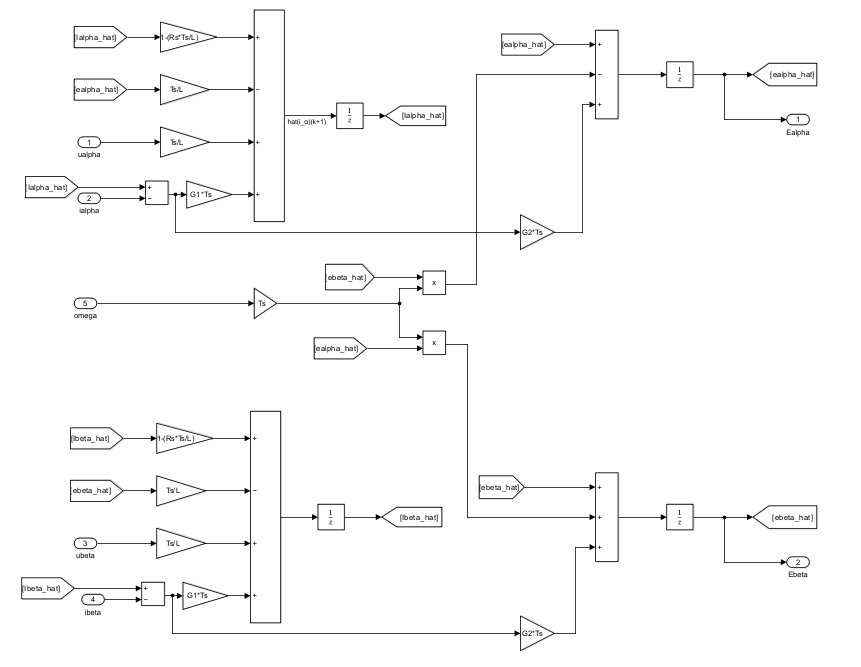
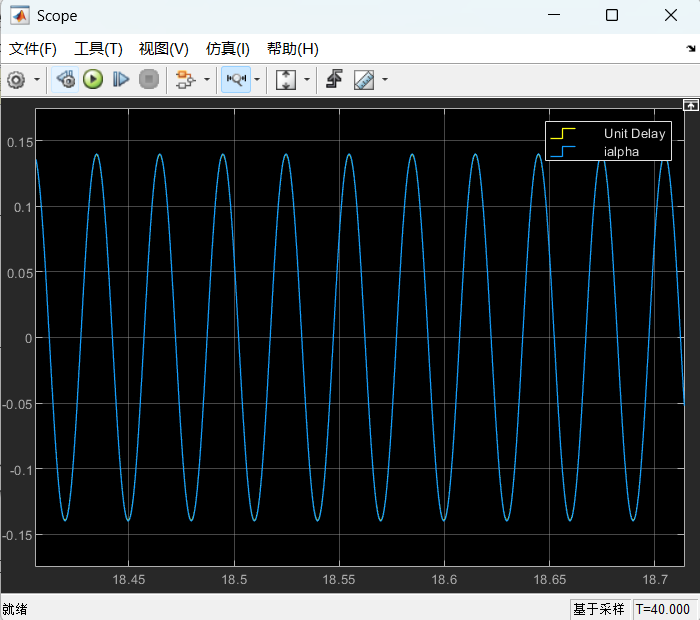
选取合适增益后运行,用示波器查看i_α和hat(i_α)波形发现观测收敛,如下:
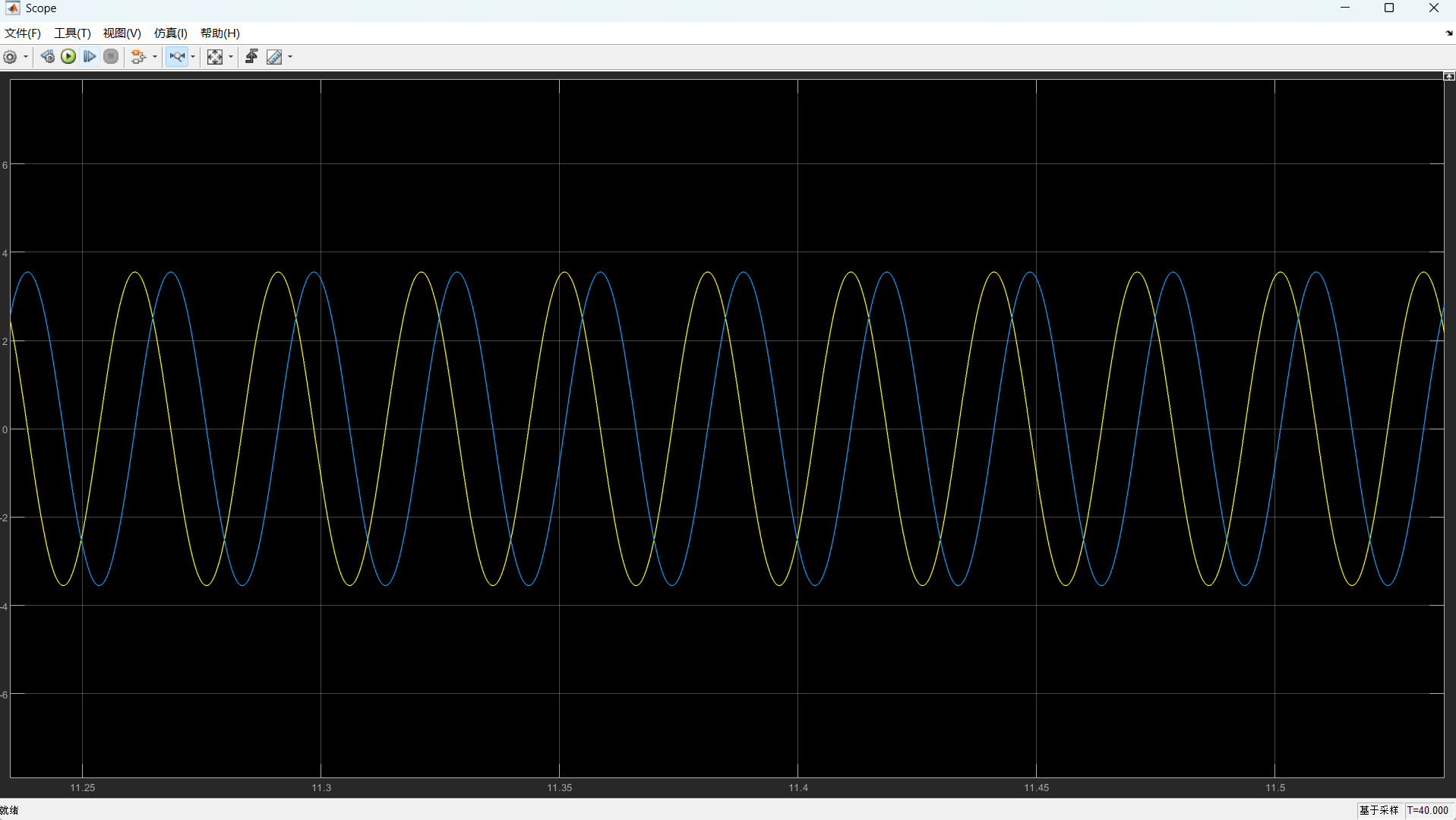
反电动势为: