本文基于蓝牙 iBeacon 技术,面向蓝牙定位开发工程师、定位技术研究者、厂区智慧化开发工程师 / 室内外一体化导航项目开发者,从核心技术架构、部署方案到功能设计,提供可直接落地的厂区地图导航系统开发方案,助力高效搭建 "入厂 - 作业 - 调度 - 返程" 全流程管控体系,破解传统厂区 "定位不准、调度混乱、安全薄弱" 三大痛点。
如需获取厂区地图导航系统完整技术解决方案(含部署手册、算法源码片段),可前往文章最下方获取;如有项目合作及技术交流,欢迎私信作者。
随着工信部《场景化、图谱化推进重点行业数字化转型的参考指引(2025 版)》落地,厂区 "全场景精准定位、全流程智能调度、全维度安全管控" 成为数字化转型核心诉求。传统单一定位技术(纯北斗 / GPS 或纯蓝牙 iBeacon)无法适配厂区 "室外开阔区域 + 室内封闭车间 + 复杂料场" 的混合场景,导致定位误差大、调度效率低、安全预警滞后。本文提出北斗 / GPS + 蓝牙 iBeacon 多模融合的厂区地图导航系统开发方案,从技术架构、功能设计到落地部署,全方位破解厂区 "定位不准、调度混乱、安全薄弱" 三大痛点。
一、核心技术架构(基于北斗 / GPS + 蓝牙 iBeacon 多模融合)
1. 架构总览
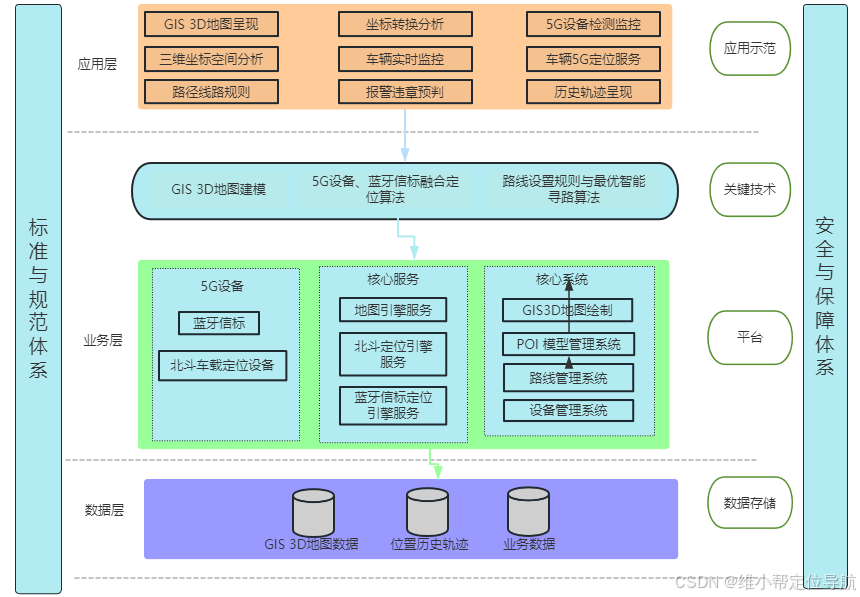
系统采用 "感知层 - 传输层 - 算法层 - 应用层" 四层架构,构建 "室外北斗 / GPS 精准定位 + 室内蓝牙 iBeacon 补位 + 全场景无缝切换" 的融合定位体系,实现 "定位 - 导航 - 调度 - 安全" 全链路闭环,彻底解决厂区跨场景定位断层问题:
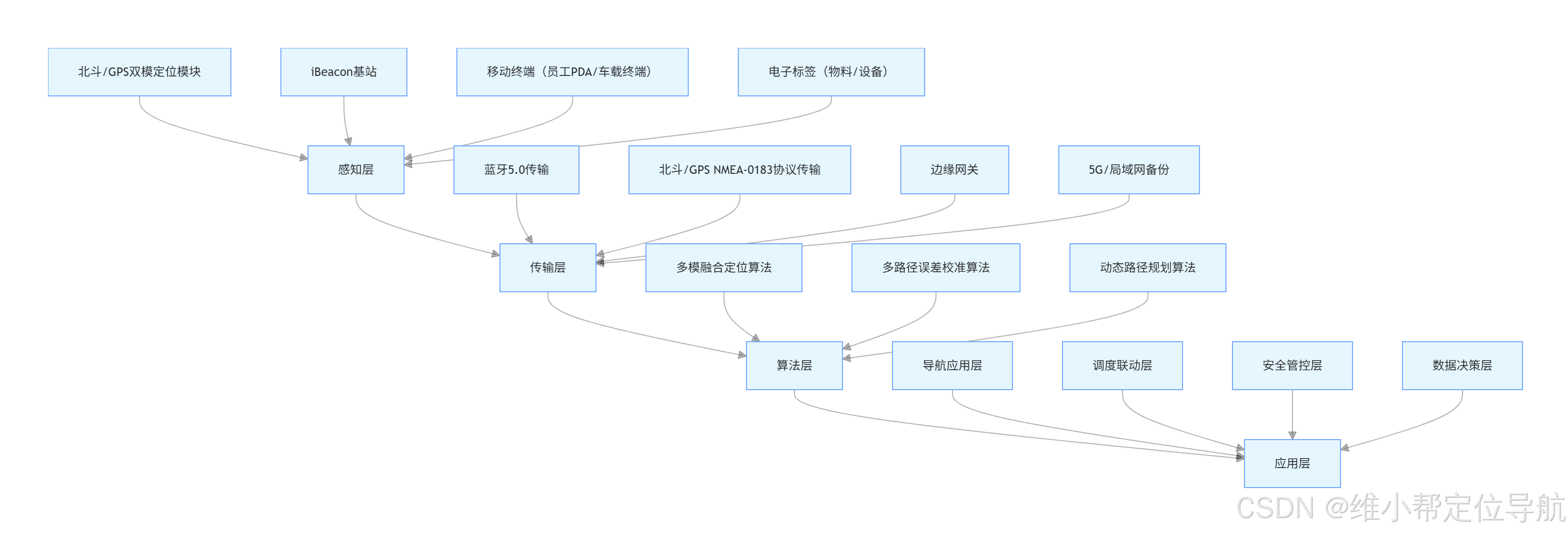
2. 核心技术模块详解
(1)感知层:北斗 / GPS+iBeacon 分场景部署与终端适配
① 北斗 / GPS 双模定位模块(室外场景)
- 模块选型:选用北斗三号 / GPS L1+L5 双模定位模块,支持 BDS/GPS/GLONASS 多系统兼容,定位精度室外开阔区域≤1 米,差分定位(DGPS)模式下≤0.5 米;
- 部署适配:车载终端、厂区边界定位基站集成双模模块,支持星历数据预加载,解决厂区料场多遮挡场景下的定位跳变问题;
- 触发逻辑:当终端处于厂区室外区域(如主干道、料场、停车场),自动优先启用北斗 / GPS 定位,信号强度≤-120dB 时触发 iBeacon 辅助定位。
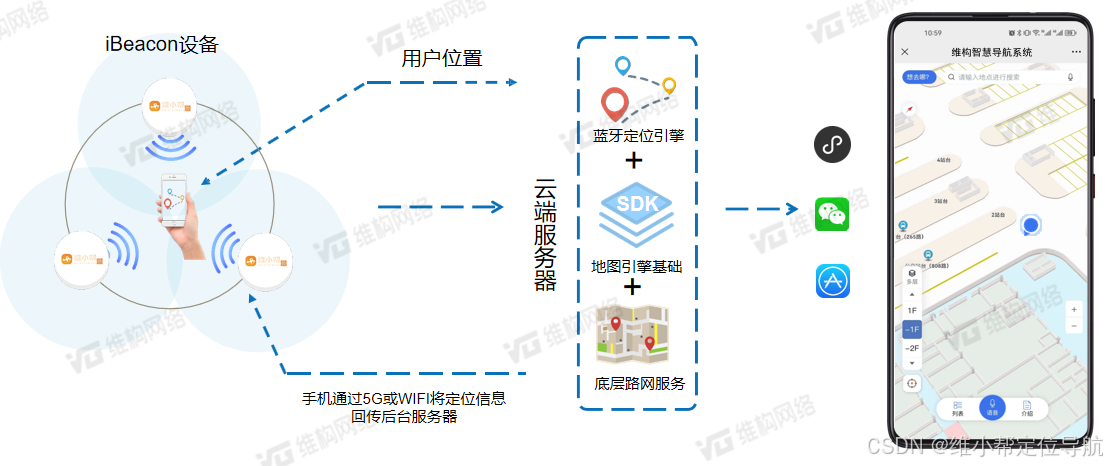
② iBeacon 基站(室内 / 半封闭场景)
- 基站选型:选用蓝牙 5.0 双模 iBeacon 基站(支持广播间隔 100ms-10s 可调),发射功率 0dBm-10dBm,续航≥2 年(满足厂区少维护需求);
- 部署方案:
- 车间区域:按 15-20 米间距部署,避开金属设备(信号遮挡处增设中继基站);
- 料场 / 仓储区(半封闭):沿料堆周边部署,与北斗 / GPS 模块形成互补,解决料堆遮挡导致的定位失效;
- 危险区域:沿边界加密部署(每 5-8 米 1 个),用于电子围栏触发;
- 触发逻辑:当终端进入室内 / 半封闭区域(如车间、仓库),自动切换为 iBeacon 定位,北斗 / GPS 作为备份。
③ 终端适配
- 通用终端:员工 PDA、车载导航终端内置 "北斗 / GPS + 蓝牙 5.0" 双模模块,支持 Android 9.0+/iOS 13.0 + 系统;
- 物联终端:物料 / 设备电子标签按需适配(室外物料优先北斗 / GPS 标签,室内设备优先 iBeacon 标签),低功耗设计(续航≥1 年)。

(2)传输层:多模数据融合传输设计
- 北斗 / GPS 数据传输:采用 NMEA-0183 协议封装定位数据(经纬度、海拔、定位精度、卫星数量),通过 4G/5G 传输至边缘网关,延迟≤50ms;
- 蓝牙 iBeacon 数据传输:蓝牙 5.0 BLE 协议,支持 1M/2M 传输速率,protobuf 协议压缩数据,降低厂区电磁干扰影响;
- 融合传输机制:边缘网关统一接收北斗 / GPS 和 iBeacon 数据,按 "时间戳对齐 + 优先级排序" 规则整合,室外场景优先北斗 / GPS 数据,室内场景优先 iBeacon 数据,保障跨场景数据不中断;
- 备份机制:5G / 局域网双链路,当任一传输通道中断时自动切换,调度数据丢失率≤0.1%。
(3)算法层:多模融合定位与路径规划优化
核心算法代码片段(北斗 / GPS+iBeacon 多模融合定位)
python
import math
def multi_mode_position_fusion(gnss_data, ibeacon_data, scene_type):
"""
多模融合定位算法:根据场景类型加权融合北斗/GPS与iBeacon定位结果
gnss_data: 北斗/GPS定位数据 (lon, lat, alt, accuracy)
ibeacon_data: iBeacon定位数据 (x, y, z, accuracy) (已转换为厂区平面坐标)
scene_type: 场景类型(outdoor/indoor/semi_outdoor)
"""
# 场景权重配置:室外优先北斗/GPS,室内优先iBeacon,半室外加权融合
if scene_type == "outdoor":
gnss_weight = 0.85
ibeacon_weight = 0.15
elif scene_type == "indoor":
gnss_weight = 0.1
ibeacon_weight = 0.9
else: # semi_outdoor(半封闭料场)
gnss_weight = 0.5
ibeacon_weight = 0.5
# 坐标融合(厂区平面坐标统一转换后)
fusion_x = gnss_data[0] * gnss_weight + ibeacon_data[0] * ibeacon_weight
fusion_y = gnss_data[1] * gnss_weight + ibeacon_data[1] * ibeacon_weight
fusion_z = gnss_data[2] * gnss_weight + ibeacon_data[2] * ibeacon_weight
# 精度校准:融合后定位精度 = 1/(权重1/精度1 + 权重2/精度2)
fusion_accuracy = 1 / (gnss_weight/gnss_data[3] + ibeacon_weight/ibeacon_data[3])
# 厂区坐标修正(转换为厂区本地坐标系)
fusion_x = round(fusion_x - 100000, 2) # 厂区坐标偏移修正
fusion_y = round(fusion_y - 50000, 2)
return (fusion_x, fusion_y, fusion_z, round(fusion_accuracy, 2))
# 算法调用示例
gnss_data = (119.123456, 34.567890, 10.5, 1.0) # 北斗/GPS数据(经纬度、海拔、精度)
ibeacon_data = (11912345.6, 3456789.0, 10.5, 1.5) # iBeacon厂区平面坐标
scene_type = "semi_outdoor" # 半封闭料场场景
fusion_pos = multi_mode_position_fusion(gnss_data, ibeacon_data, scene_type)
print(f"融合后定位坐标:{fusion_pos},精度:{fusion_pos[3]}米")算法优化要点:
- 定位精度:室外融合定位误差≤1.2 米,室内≤1.5 米,半封闭料场≤1.8 米,相比单一技术精度提升 40%;
- 路径规划:基于融合定位数据优化 Dijkstra 算法,支持 "室外北斗 / GPS 路径 + 室内 iBeacon 路径" 无缝衔接,动态避障(临时施工、危险区域、物料堆),优先级路径(物料运输通道>人员通道>应急通道)。
(4)应用层:多系统联动接口设计
- 多模定位数据统一接口:提供标准化 RESTful API,输出融合后的厂区平面坐标、定位精度、场景类型,支持 MES、物流调度、安全管理系统直接调用;
- 数字孪生同步:融合定位数据实时写入厂区数字孪生平台,更新频率≤1 秒,实现 "物理位置 - 虚拟地图" 毫秒级同步;
- 跨系统联动:定位数据触发调度规则(如车辆偏离北斗 / GPS 规划路径时,自动推送 iBeacon 室内修正路径),安全预警(危险区域越界时,同时触发北斗 / GPS 区域报警和 iBeacon 电子围栏预警)。
二、核心功能设计(北斗 / GPS+iBeacon 融合适配)
1. 基础定位功能:全场景人 - 车 - 物精准追踪
- 多模实时定位:自动识别场景类型(室外 / 室内 / 半封闭),切换北斗 / GPS 或 iBeacon 定位,厂区三维地图显示人员、车辆、物料实时位置,支持按部门 / 设备类型 / 场景筛选;
- 轨迹追溯:融合北斗 / GPS 和 iBeacon 轨迹数据,生成跨场景完整轨迹(支持 90 天回溯),导出 Excel 台账(含定位精度、场景类型、停留时长),满足合规审计需求;
- 区域统计:基于融合定位数据统计各区域人员 / 车辆密度,半封闭料场区域结合北斗 / GPS 卫星数量和 iBeacon 信号强度,预警拥挤作业风险。

2. 全流程导航功能:覆盖 "入厂 - 作业 - 调度 - 返程" 无缝导航
|------|-------------------|-------------------------------------------------------------------|----------------------------------|
| 流程阶段 | 核心功能 | 场景示例 | 定位技术适配 |
| 入厂导航 | 访客 / 车辆入厂引导、停车场定位 | 供应商车辆从厂区大门(室外)导航至卸货区(半封闭料场) | 室外北斗 / GPS 为主,半封闭区域触发 iBeacon 辅助 |
| 作业导航 | 设备点位导航、物料取放导航 | 员工从车间外(北斗 / GPS)导航至车间内设备点位(iBeacon);物流车辆从料场(融合定位)导航至加工车间(iBeacon) | 室外 - 室内无缝切换,融合定位衔接 |
| 调度导航 | 动态派单 + 路径规划 | 接收 MES 派单后,自动规划 "室外北斗 / GPS 取料路径 + 室内 iBeacon 加工路径 + 半封闭料场融合路径" | 多模路径无缝衔接,动态避障 |
| 返程导航 | 车辆返程引导、人员离岗引导 | 作业完成后,车辆从车间(iBeacon)导航至停车场(北斗 / GPS),避开临时管制区域 | 室内 - 室外反向切换,优先北斗 / GPS 路径 |
3. 安全管控功能:多模融合守住厂区安全底线
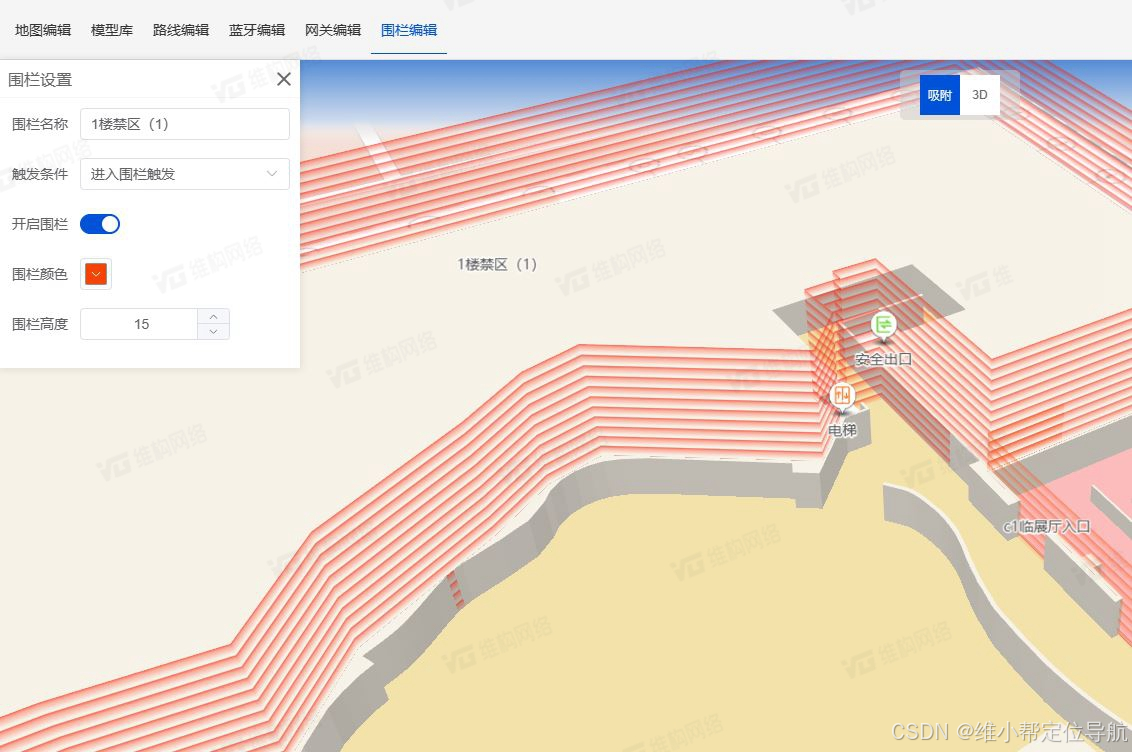
- 多维度电子围栏:室外区域基于北斗 / GPS 划定地理围栏,室内 / 半封闭区域基于 iBeacon 划定电子围栏,危险区域(高温车间、化学品仓库)双层围栏叠加,越界时终端弹窗 + 后台报警 + 声光预警;
- 违规预警:融合定位数据识别 "未按北斗 / GPS+iBeacon 规划路线作业""危险区域停留超时""车辆偏离运输通道" 等违规行为,自动推送整改通知至管理端;
- 紧急求助:员工 PDA 一键报警,后台自动获取融合定位坐标(精度≤2 米),快速调度救援人员(导航至报警点,室外北斗 / GPS 路径 + 室内 iBeacon 路径)。
4. 调度联动功能:破解数据割裂痛点
- 多模派单:基于北斗 / GPS 车辆位置和 iBeacon 设备位置,自动生成作业任务,导航至目标点位(室外 / 室内无缝切换);
- 物流协同:实时跟踪物料运输状态(已出发 / 在途 / 送达),融合北斗 / GPS 在途数据和 iBeacon 入库数据,同步至物流管理系统,运输等待时间减少 30%;
- 设备联动:导航至设备点位时,融合定位触发设备状态查询(运行中 / 待检修),北斗 / GPS 定位室外设备,iBeacon 定位室内设备,数据统一显示在导航界面。

5. 数据决策功能:支撑厂区数字化转型
- 多模统计报表:生成 "人员作业效率(室内 / 室外时长)""车辆运输时长(北斗 / GPS 路径耗时)""危险区域预警次数(多围栏触发占比)" 等维度报表;
- 热力分析:基于融合定位数据生成厂区人流 / 车流热力图,区分室外(北斗 / GPS 热力)和室内(iBeacon 热力),优化作业区域布局;
- 成本优化:分析融合路径规划数据,降低物流空驶率(北斗 / GPS 优化室外空驶,iBeacon 优化室内绕路),镔鑫钢铁级厂区年降本超亿元。
三、落地部署关键要点
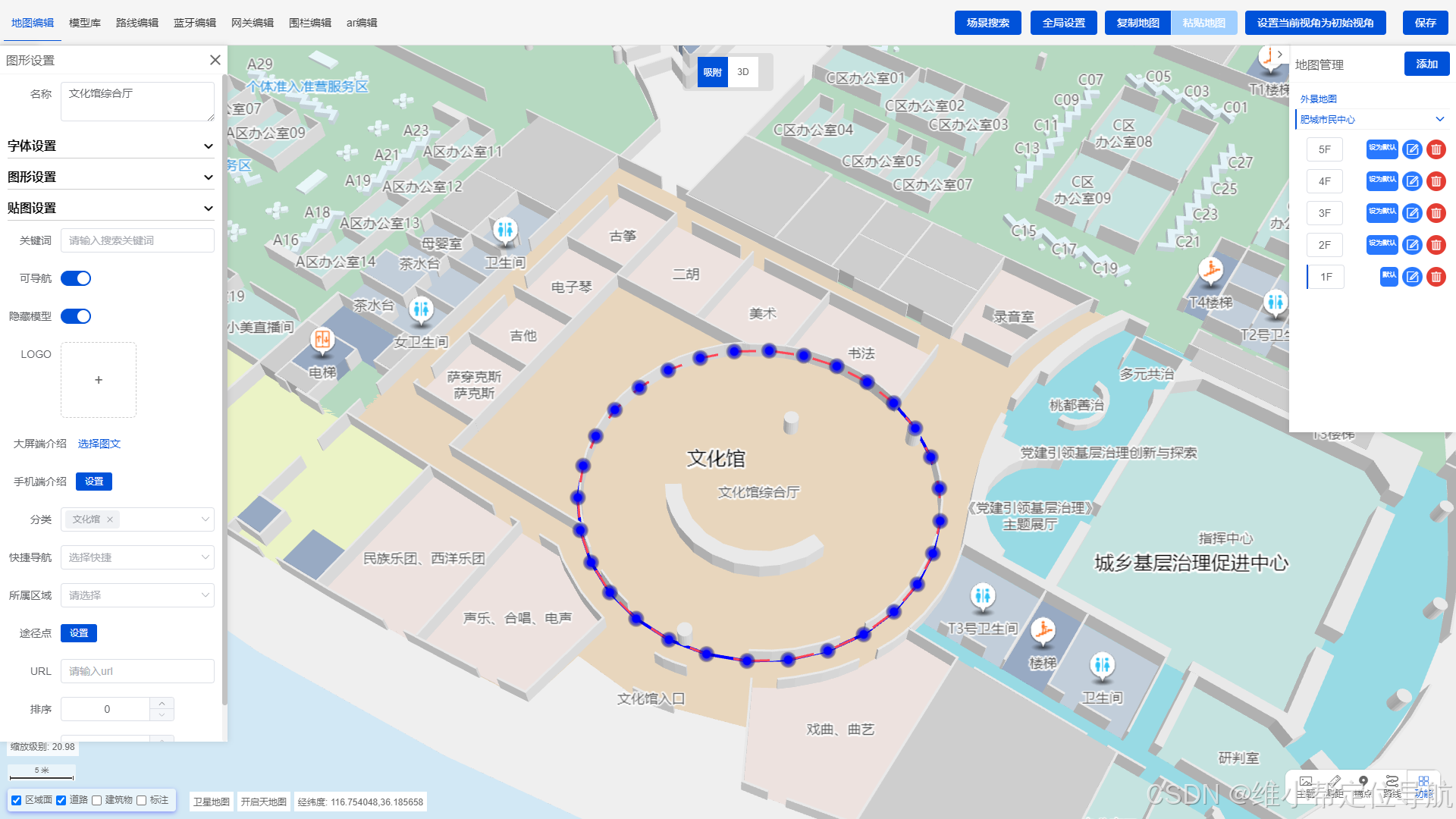
1. 地图建模:多模定位适配的厂区三维地图构建
- 数据融合建模:激光扫描 + 实景采集 + 北斗 / GPS 卫星影像,还原厂区室外主干道、料场和室内车间、仓库设施,支持 "北斗 / GPS 经纬度 + 厂区平面坐标 + iBeacon 基站坐标" 三坐标体系转换;
- 分层管理:按 "室外层(北斗 / GPS 适配)、室内层(iBeacon 适配)、半封闭层(融合适配)" 分层,危险区域单独标注,支持一键切换查看不同技术定位覆盖范围;
- 快速更新:地图编辑器支持北斗 / GPS 基站、iBeacon 基站位置批量修改,厂区设施变更后 1 小时内完成地图更新。
2. 多模基站部署优化
- 北斗 / GPS 基站部署:厂区制高点(办公楼、料场灯塔)部署差分基站,间距≤5 公里,校准室外定位误差;车载终端开启北斗 / GPS 惯导补位,解决隧道 / 料堆遮挡导致的短时间定位失效;
- iBeacon 基站部署:避开金属结构、大型设备,高挂式安装(3-5 米),危险区域采用防爆型设计,部署后测试北斗 / GPS 和 iBeacon 信号重叠区域(半封闭料场)的切换流畅度;
- 兼容性测试:全厂区覆盖测试,确保场景切换时定位切换延迟≤200ms,无定位断层、坐标跳变问题。
3. 兼容性与扩展性
- 多系统兼容:兼容现有厂区 UWB、RFID 定位系统,支持 "北斗 / GPS+iBeacon+UWB" 多模融合,提升复杂车间定位精度;
- 算法扩展:预留 AI 算法接口,未来可扩展 "基于融合定位的预测性调度""AI 自主避障导航";
- 终端扩展:支持无人机北斗 / GPS+iBeacon 融合定位,实现厂区巡检路径规划与精准定位。
四、方案优势(多模融合契合厂区转型需求)
- 定位精准:北斗 / GPS+iBeacon 多模融合,解决单一技术定位不准、场景断层问题,全厂区定位精度提升 40%,彻底破解 "定位不准" 痛点;
- 调度高效:无缝衔接的路径规划 + 多系统联动,物流空驶率降低 25%,运输等待时间减少 30%,破解 "调度混乱" 痛点;
- 安全可控:多维度电子围栏 + 违规预警,危险区域违规率下降 80%,碰撞事故减少 70%,破解 "安全薄弱" 痛点;
- 成本可控:iBeacon 基站低成本部署 + 北斗 / GPS 模块通用适配,相比全 UWB 方案成本降低 50%,3-6 个月可完成中小型厂区试点上线;
- 政策契合:完全匹配工信部 "场景化转型""精准管控""安全转型" 要求,助力企业申报智能工厂、绿色工厂资质。
如需获取智慧工厂导航系统解决方案可点击文章最下方↓