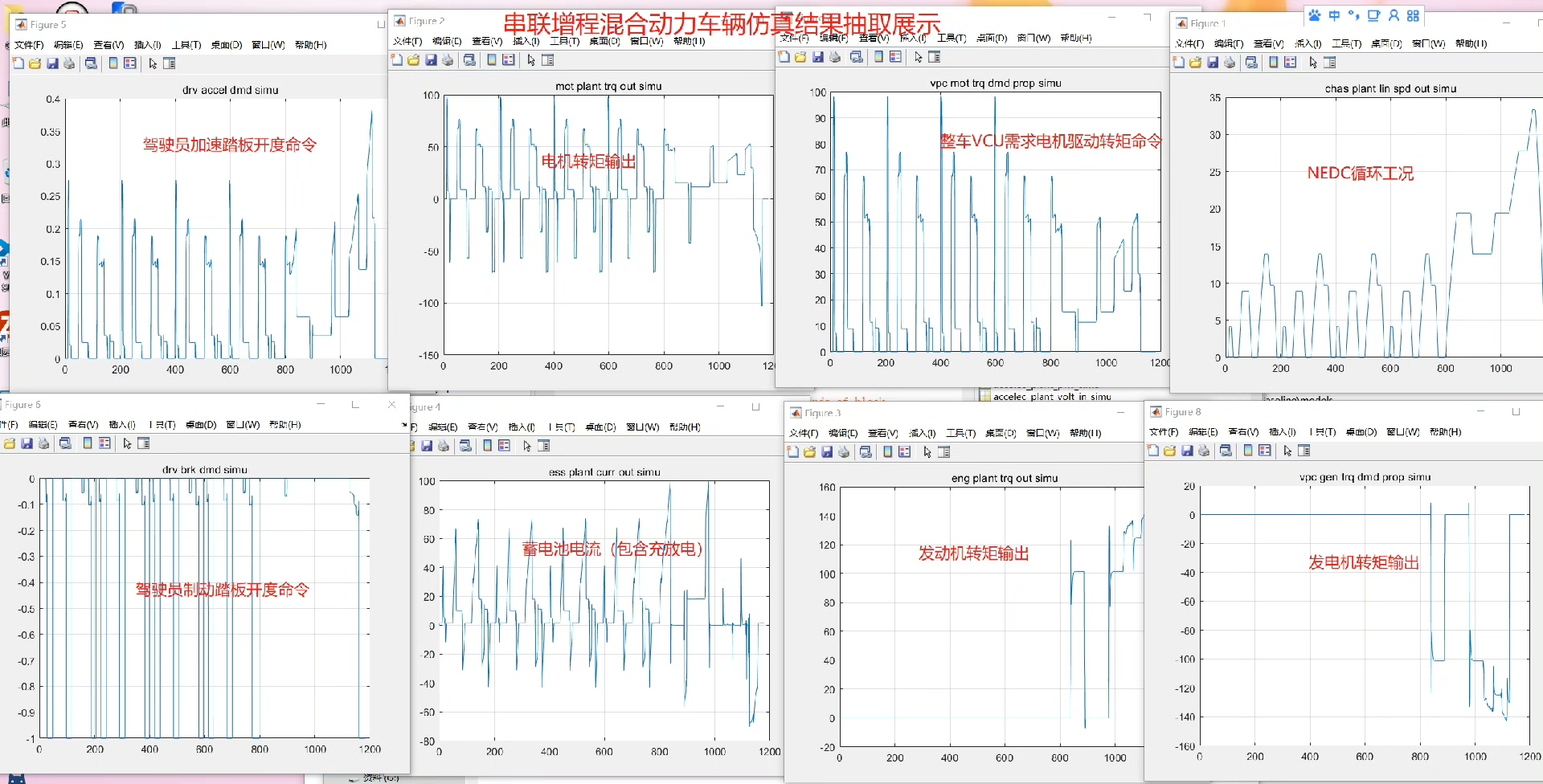
串联构型混合动力汽车Simulink仿真模型建模,正向仿真模型,采用成熟人车路软件架构,基于功率跟随控制策略,包含完整的初始化文件,整车模型,以及说明文档,可进行适当。 也可提供其他变种构型,不考虑热管理建模,例如p1,p2,p4,p1+p3,p1+p2,p1+p2带档位,p1+p3带档位,evt,ser串联,传统车,前后轴双电机驱动,液压驱动,燃料电池汽车,纯电动汽车,前后轴不同驱动形式等,具体可技术沟通。 保证每个模型能够顺利运行,能够修改任何模块的仿真初始化参数,仿真设置,仿真工况(可提供仿真工况库),加速性测试,最大爬坡度测试,经济性测试等。
搞混合动力仿真总得有个趁手的模型吧?今天咱们就盘盘手头这个基于Simulink的串联构型混动平台。这模型最香的地方在于它把整车控制、动力分配、工况测试都打包好了,特别适合拿来当二次开发的母版。
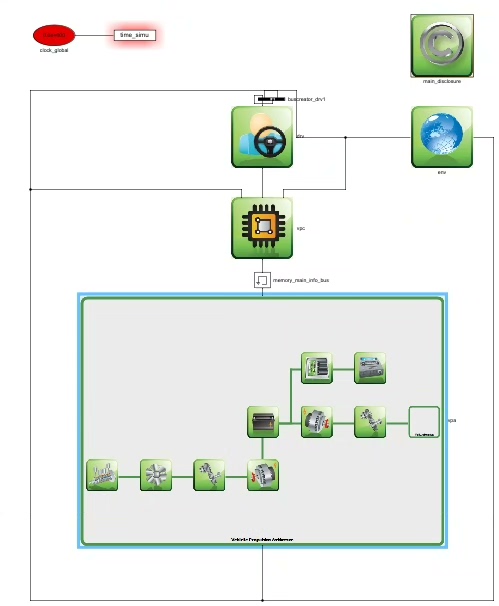
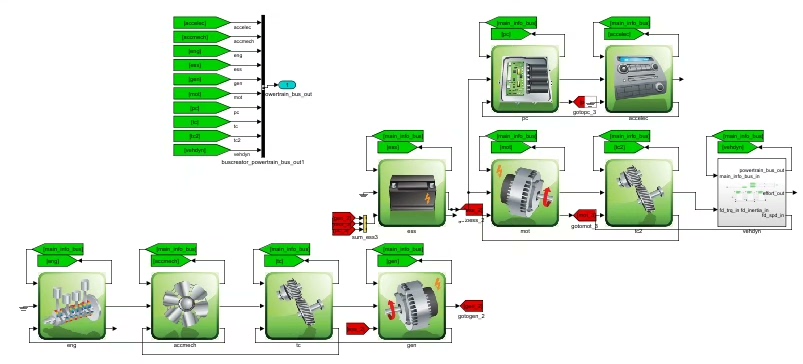
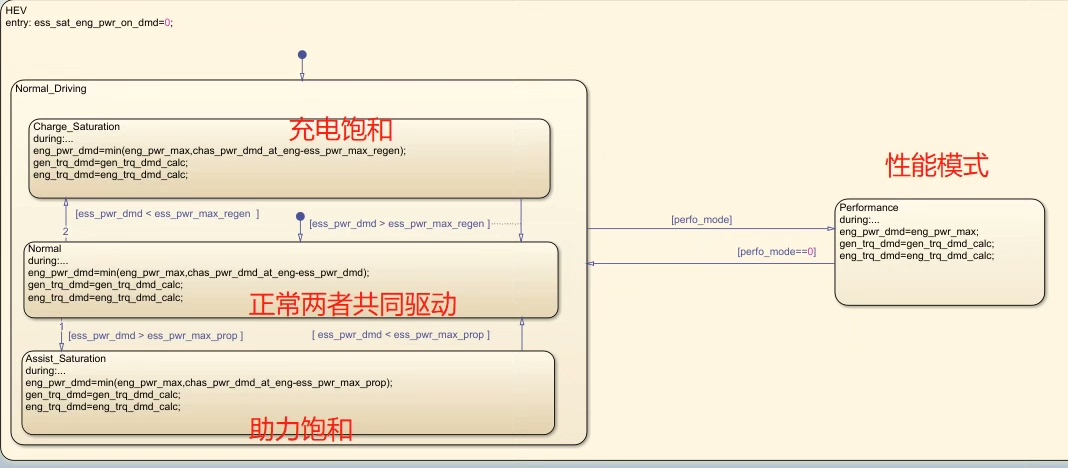
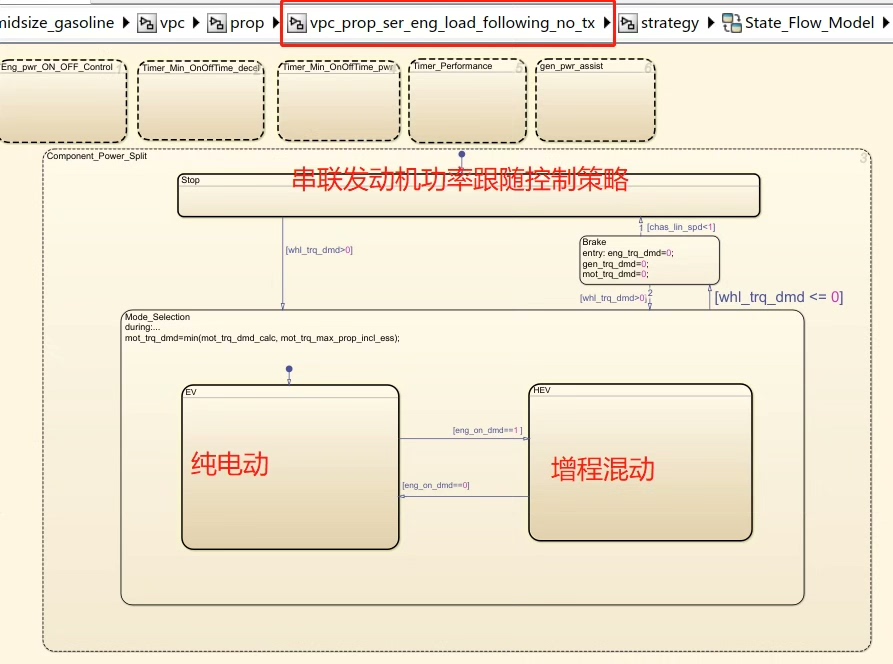
模型架构分得挺明白:整车控制器(HCU)坐在最上层,底下挂着发动机-发电机组、驱动电机、动力电池三大件。道路环境模块里预置了CLTC-P和NEDC工况,要是想自己搞个山路十八弯的测试工况,直接把.mat文件往Drive_Cycle库里一扔就能调用。看这段动力请求处理的核心代码:
matlab
function [Engine_Pwr, Motor_Pwr] = PowerSplit(SOC, Veh_Spd)
persistent Last_Mode;
if isempty(Last_Mode)
Last_Mode = 'EV';
end
if SOC > 0.3 && Veh_Spd < 60
Mode = 'EV';
else
Mode = 'CS';
end
if ~strcmp(Mode, Last_Mode)
% 模式切换时执行斜坡过渡
Engine_Pwr = linspace(0, Target_EngPwr, 10);
Motor_Pwr = linspace(Current_MotorPwr, Target_MotorPwr, 10);
end
% ...后续功率分配逻辑
end这段代码实现了功率跟随策略里的状态机切换,重点看那个linspace斜坡函数------直接避免了动力模式突变导致的扭矩冲击。很多新手会在模式切换时直接跳变功率请求,结果仿真曲线出现不连续的阶跃,实测车速能给你抖成筛子。
初始化文件也别小看,Veh_Params.m里藏着乾坤:
matlab
% 动力系统参数
Motor.PeakPower = 120; % kW 这个值改到150就变高功率版
Batt.Capacity = 18.9; % kWh
Gen.RatedRPM = 2800; % 发电机组转速阈值
% 经济性权重系数
Cost.Electricity = 0.8; % 电费系数
Cost.Fuel = 6.5; % 油价系数改参数比改图形界面快多了,特别是做参数扫掠的时候,直接脚本循环跑起来,一晚上能把上百组配置仿真全跑完。上次帮客户做P1+P3构型优化,就是靠这个自动化脚本找到的最佳燃效点。
说到变种构型,模型库里备着十几种动力模块。想从串联切到P2混动?直接调用P2_Drivetrain模块替换现有动力链就行,注意同步修改传动比参数。看这个构型切换函数:
matlab
function Switch_Configuration(new_config)
% 先备份当前配置
save('Last_Config.slx', 'Current_Model');
% 动态加载目标模块
load_system('Component_Library');
replace_block('Current_Model/Drivetrain', ...
'LookUnderMasks', 'all', ...
'Name', 'Current_Drive', ...
'Component_Library/'+new_config, ...
'noprompt');
% 刷新信号连接
Simulink.BlockDiagram.arrangeSystem;
end测试环节才是重头戏,模型自带的工况库支持0-100kph加速测试。跑完仿真别急着看结果,先检查总线信号有没有断链。曾经有个兄弟仿真结果异常,最后发现是CAN总线上的车速信号单位混用了mph和kph...
经济性测试记得打开能耗统计模块:
matlab
Energy_Recorder = find_system('Main_Model', 'Name','Energy_Logger');
set_param(Energy_Recorder{1}, 'Logging','on');
sim('Main_Model');
fuel_consumption = Energy_Logs.get('Fuel_Used').Values.Data;这组数据配合Simulink Design Optimization工具包,能自动优化控制策略参数。上次用这个功能硬是把某方案的NEDC油耗从5.8L/100km压到了5.2L。
模型现在支持燃料电池和纯电架构的快速切换,秘诀在于动力源接口标准化。想加个液压驱动?只要新模块的输入输出端口符合Energy_Port标准,插上就能用。不过得注意动力特性曲线的拟合精度------上次有个液压模块因为扭矩曲线用三次多项式拟合,高速段出现了负扭矩的鬼畜现象...
最后说个避坑指南:仿真步长千万别无脑用auto。建议车速相关模块用0.01s固定步长,热力学模块可以用变步长,这样既保证实时性又不会算到天荒地老。有次用变步长跑高速工况,结果ABS控制逻辑出问题,就是因为步长突然变大导致轮速信号采样丢失。