cv2.sqrBoxFilter 是 OpenCV 中用于计算像素邻域平方和的盒式滤波函数
代码
bash
# -*- coding:utf-8 -*-
import cv2 as cv
import numpy as np
import sys
if __name__ == '__main__':
# 读取图像并判断是否读取成功
img = cv.imread('./images/eq.png', cv.IMREAD_ANYDEPTH)
if img is None:
print('Failed to read eq.png.')
sys.exit()
# 验证方框滤波算法的数组矩阵
points = np.array([[1, 2, 3, 4, 5],
[6, 7, 8, 9, 10],
[11, 12, 13, 14, 15],
[16, 17, 18, 19, 20],
[21, 22, 23, 24, 25]], dtype='float32')
# 将图像转为float32类型的数据
img_32 = img.astype('float32')
print("img_orign=.{}".format(img))
img_32 /= 255.0
print("img_32=.{}".format(img_32))
# 方框滤波cv.boxFilter()和cv.sqrBoxFilter()
# 进行归一化
img_box_norm = cv.boxFilter(img, -1, (3, 3), anchor=(-1, -1), normalize=True)
# 不进行归一化
img_box = cv.boxFilter(img, -1, (3, 3), anchor=(-1, -1), normalize=False)
# 进行归一化
points_sqr_norm = cv.sqrBoxFilter(points, -1, (3, 3), anchor=(-1, -1),
normalize=True, borderType=cv.BORDER_CONSTANT)
img_sqr_norm = cv.sqrBoxFilter(img, -1, (3, 3), anchor=(-1, -1),
normalize=True, borderType=cv.BORDER_CONSTANT)
# 不进行归一化
points_sqr = cv.sqrBoxFilter(points, -1, (3, 3), anchor=(-1, -1),
normalize=False, borderType=cv.BORDER_CONSTANT)
print("points_sqr=.{}".format(points_sqr))
# 展示图像处理结果
cv.imshow('Result(cv.boxFilter() NORM)', img_box_norm)
cv.imshow('Result(cv.boxFilter()', img_box)
cv.imshow('Result(cv.sqrBoxFilter() NORM', img_sqr_norm / np.max(img_sqr_norm))
cv.imshow('Result(cv.sqrBoxFilter()', points_sqr / np.max(points_sqr))
cv.waitKey(0)
cv.destroyAllWindows()cv2.sqrBoxFilter 是 OpenCV 中用于计算像素邻域平方和的盒式滤波函数,核心作用是快速统计图像局部区域的像素值平方和,常作为方差滤波、边缘检测、图像梯度计算等高级操作的基础(例如推导局部方差、标准差)。
函数基本语法
cv2.sqrBoxFilter(src, ddepth, ksize, dst=None, anchor=None, normalize=None, borderType=None)

返回值
返回与输入图像尺寸、通道数一致的输出图像(ndarray 格式),像素值为对应邻域的平方和(或归一化后的平方均值)。
核心原理
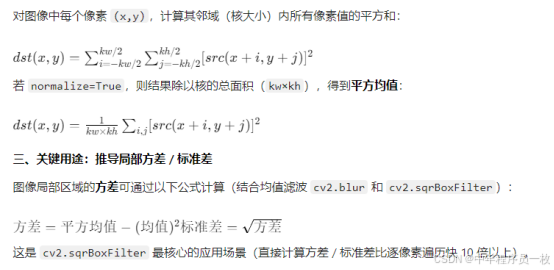
标准差图像中,亮区表示局部像素值波动大(边缘 / 纹理),暗区表示像素值均匀(平滑区域)。
关键注意事项
数据类型与溢出问题
输入为 uint8(0-255)时,像素平方最大值为 255²=65025,若核尺寸为 5×5,平方和最大值为 25×65025=1,625,625,远超 uint8 范围(0-255);
必须将 ddepth 设为 cv2.CV_32F/cv2.CV_64F,否则会导致值截断、结果错误。
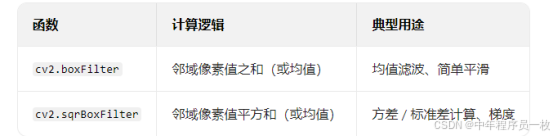
与 cv2.boxFilter 的区别
边缘填充方式
默认 cv2.BORDER_DEFAULT(镜像填充)适合大多数场景;若需边缘用固定值填充(如黑色),可指定 borderType=cv2.BORDER_CONSTANT:
sqr_sum = cv2.sqrBoxFilter(img_float, cv2.CV_32F, (3,3), borderType=cv2.BORDER_CONSTANT)
非正方形核
核尺寸支持矩形(如 (7,3)),适用于定向统计(如水平方向平方和):
bash
# 3(宽)×7(高)核,侧重水平方向的平方和统计
sqr_sum_rect = cv2.sqrBoxFilter(img_float, cv2.CV_32F, (3, 7))