文章目录
-
- 一、决策树基本概念
- 二、决策树分类算法
-
- [1. ID3算法](#1. ID3算法)
- [2. C4.5算法](#2. C4.5算法)
- [3. CART决策树](#3. CART决策树)
- 三、决策树回归模型
-
- [1. 回归树特点](#1. 回归树特点)
- [2. 回归树计算示例](#2. 回归树计算示例)
- 四、Scikit-learn中的决策树实现
-
- [1. 分类决策树参数](#1. 分类决策树参数)
- [2. 回归决策树参数](#2. 回归决策树参数)
- 五、Python实现示例
-
- [1. 分类决策树实现](#1. 分类决策树实现)
- 六、决策树剪枝
-
- [1. 剪枝的目的](#1. 剪枝的目的)
- [2. 剪枝方法](#2. 剪枝方法)
- [3. 预剪枝策略](#3. 预剪枝策略)
- 七、模型评估指标
-
- [1. AUC-ROC曲线](#1. AUC-ROC曲线)
- [2. AUC的优点](#2. AUC的优点)
一、决策树基本概念
决策树是一种有监督学习算法,通过对训练样本的学习建立分类或回归规则,并依据这些规则对新样本进行预测。它的核心思想是将数据从根节点逐步划分到叶子节点,形成一个树状结构。
决策树的组成
- 根节点:第一个节点,包含所有数据
- 非叶子节点(中间节点):进行数据划分的节点
- 叶子节点:最终结果节点,不再继续划分
二、决策树分类算法
决策树主要有三种分类标准:
1. ID3算法
使用信息增益作为分裂标准,基于熵值衡量节点的不确定性。
熵值计算公式 :
H ( U ) = − ∑ i = 1 n p i log 2 p i H(U) = -\sum_{i=1}^n p_i \log_2 p_i H(U)=−∑i=1npilog2pi
熵值越小,节点越"纯",包含的类别越单一。
2. C4.5算法
使用信息增益率作为分裂标准,解决了ID3算法倾向于选择取值较多的特征的问题。
3. CART决策树
使用基尼系数作为分裂标准,可以用于分类和回归问题。
基尼系数计算公式(二分类) :
G i n i ( p ) = 2 p ( 1 − p ) Gini(p) = 2p(1-p) Gini(p)=2p(1−p)
三、决策树回归模型
1. 回归树特点
- 解决回归问题的决策树模型
- 必须是二叉树结构
- 节点分裂依据是使均方误差(MSE)最小化
2. 回归树计算示例
以简单数据集为例:
| x | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| y | 5.56 | 5.7 | 5.91 | 6.4 | 6.8 | 7.05 | 8.9 | 8.7 | 9 | 9.05 |
通过计算不同切分点的损失函数,找到最优切分点,逐步构建回归树。
损失函数 :
L ( j , s ) = ∑ x i ∈ R 1 ( j , s ) ( y i − c ^ 1 ) 2 + ∑ x i ∈ R 2 ( j , s ) ( y i − c ^ 2 ) 2 L(j, s) = \sum_{x_i \in R_1(j, s)} (y_i - \hat{c}1)^2 + \sum{x_i \in R_2(j, s)} (y_i - \hat{c}_2)^2 L(j,s)=∑xi∈R1(j,s)(yi−c^1)2+∑xi∈R2(j,s)(yi−c^2)2
其中 c ^ 1 \hat{c}_1 c^1和 c ^ 2 \hat{c}_2 c^2 分别是两个区域的样本均值。
四、Scikit-learn中的决策树实现
1. 分类决策树参数
python
from sklearn.tree import DecisionTreeClassifier主要参数说明:
- criterion: 分裂标准,'gini'(基尼系数)或 'entropy'(信息熵)
- max_depth: 树的最大深度,防止过拟合
- min_samples_split: 分裂内部节点所需的最小样本数
- min_samples_leaf: 叶子节点最少样本数
- max_leaf_nodes: 最大叶子节点数
- random_state: 随机种子,保证结果可重复
2. 回归决策树参数
python
from sklearn.tree import DecisionTreeRegressor主要参数说明:
- criterion: 分裂标准,'mse'(均方误差)或 'mae'(平均绝对误差)
- 其他参数与分类树类似
五、Python实现示例
1. 分类决策树实现
python
import pandas as pd
from sklearn import tree
from sklearn.model_selection import train_test_split
from sklearn import metrics
import matplotlib.pyplot as plt
from sklearn.metrics import confusion_matrix
# 可视化混淆矩阵函数
def cm_plot(y, yp):
cm = confusion_matrix(y, yp)
plt.matshow(cm, cmap=plt.cm.Blues)
plt.colorbar()
for x in range(len(cm)):
for y_ in range(len(cm)):
plt.annotate(cm[x, y_], xy=(y_, x), horizontalalignment='center',
verticalalignment='center')
plt.ylabel('True label')
plt.xlabel('Predicted label')
return plt
# 导入数据
datas = pd.read_excel("电信客户流失数据.xlsx")
# 划分特征和标签
data = datas.iloc[:, :-1]
target = datas.iloc[:, -1]
# 划分训练集和测试集
data_train, data_test, target_train, target_test = \
train_test_split(data, target, test_size=0.2, random_state=42)
# 创建决策树分类器
dtr = tree.DecisionTreeClassifier(criterion='gini', max_depth=5, random_state=60)
# 训练模型
dtr.fit(data_train, target_train)
# 训练集预测
train_predicted = dtr.predict(data_train)
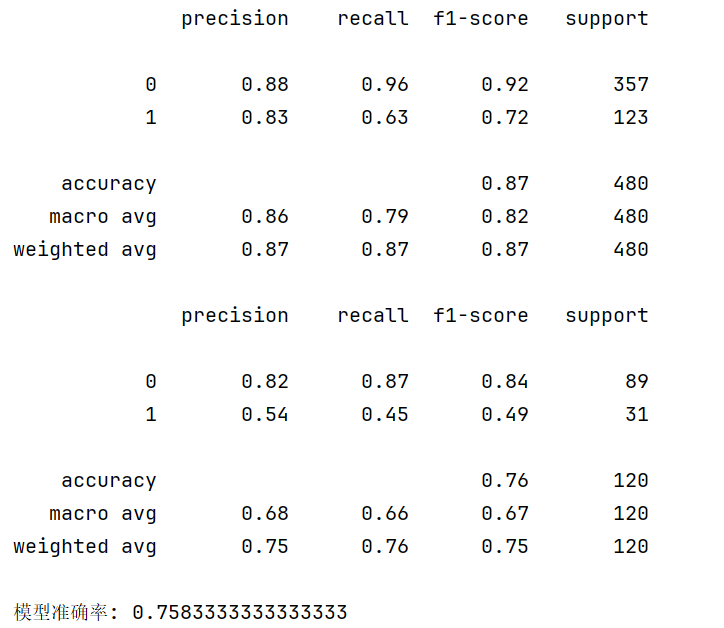
# 评估训练集
print(metrics.classification_report(target_train, train_predicted))
cm_plot(target_train, train_predicted).show()
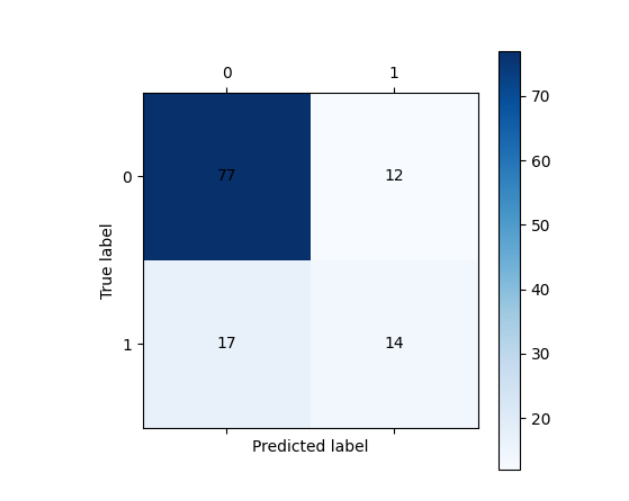
# 测试集预测
test_predicted = dtr.predict(data_test)
# 评估测试集
print(metrics.classification_report(target_test, test_predicted))
cm_plot(target_test, test_predicted).show()
# 模型评分
score = dtr.score(data_test, target_test)
print(f"模型准确率: {score}")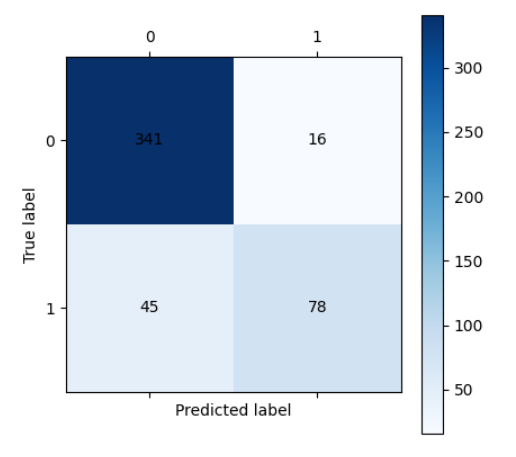
六、决策树剪枝
1. 剪枝的目的
防止过拟合,提高模型泛化能力。
2. 剪枝方法
- 预剪枝 :在树构建过程中提前停止生长
- 限制树的深度
- 限制叶子节点的个数
- 限制叶子节点的样本数
- 后剪枝:先构建完整的树,然后自底向上进行剪枝
3. 预剪枝策略
- 限制树的深度(max_depth)
- 限制叶子节点的个数(max_leaf_nodes)
- 限制分裂节点的最小样本数(min_samples_split)
- 限制叶子节点的最小样本数(min_samples_leaf)
七、模型评估指标
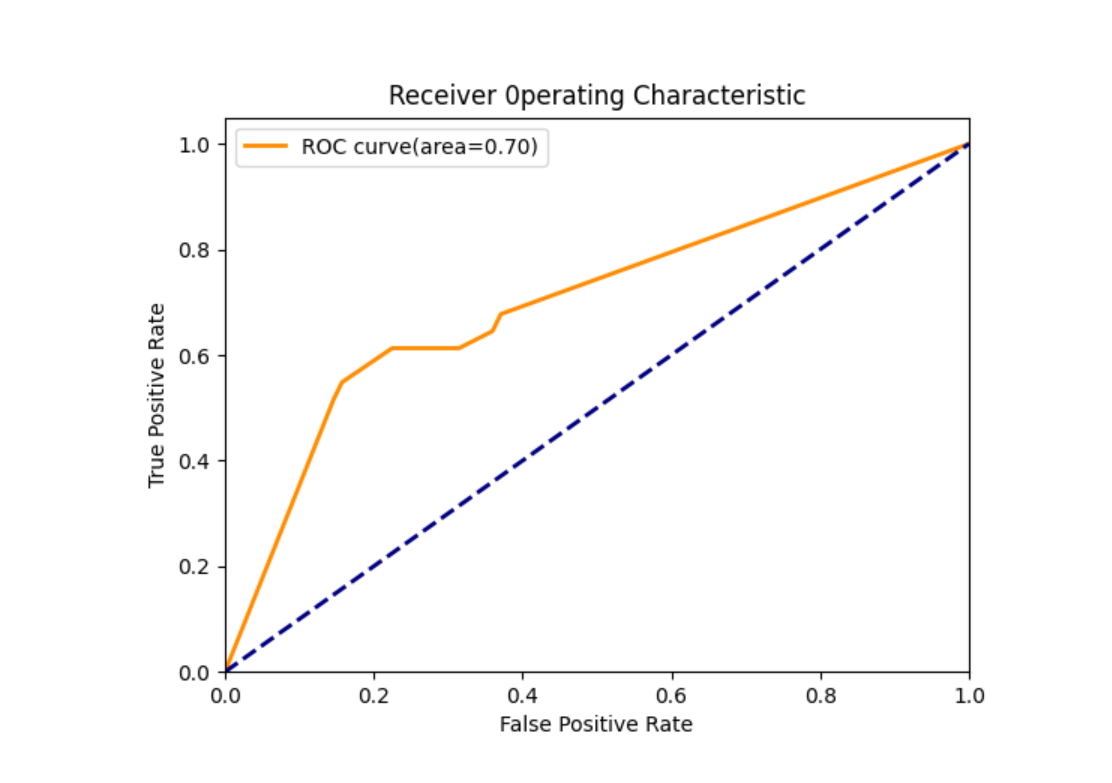
1. AUC-ROC曲线
- AUC:曲线下面积,衡量模型对正负样本的区分能力
- ROC:接收者操作特征曲线,显示不同阈值下真正例率和假正例率的关系
2. AUC的优点
- 考虑了分类器对正例和负例的分类能力
- 在样本不平衡的情况下依然有效
- 不受样本不平衡问题影响,是相对稳健的评价指标
python
# AUC值计算
y_pred_proba = dtr.predict_proba(data_test)
a = y_pred_proba[:, 1]
auc_result = metrics.roc_auc_score(target_test, a)
print(f"AUC值: {auc_result}")
# 绘制ROC曲线
from sklearn.metrics import roc_curve
fpr, tpr, thresholds = roc_curve(target_test, a)
plt.figure()
plt.plot(fpr, tpr, color='darkorange', lw=2, label=f'ROC curve (area={auc_result:.2f})')
plt.plot([0, 1], [0, 1], color='navy', lw=2, linestyle='--')
plt.xlim([0.0, 1.0])
plt.ylim([0.0, 1.05])
plt.xlabel('False Positive Rate')
plt.ylabel('True Positive Rate')
plt.title('Receiver Operating Characteristic')
plt.legend()
plt.show()