这是一个非常具体且具有挑战性的嵌入式系统移植问题。将APM飞控 移植到RK3506G 平台上,是一个在技术上可行,但工程上极具挑战的任务。
核心结论
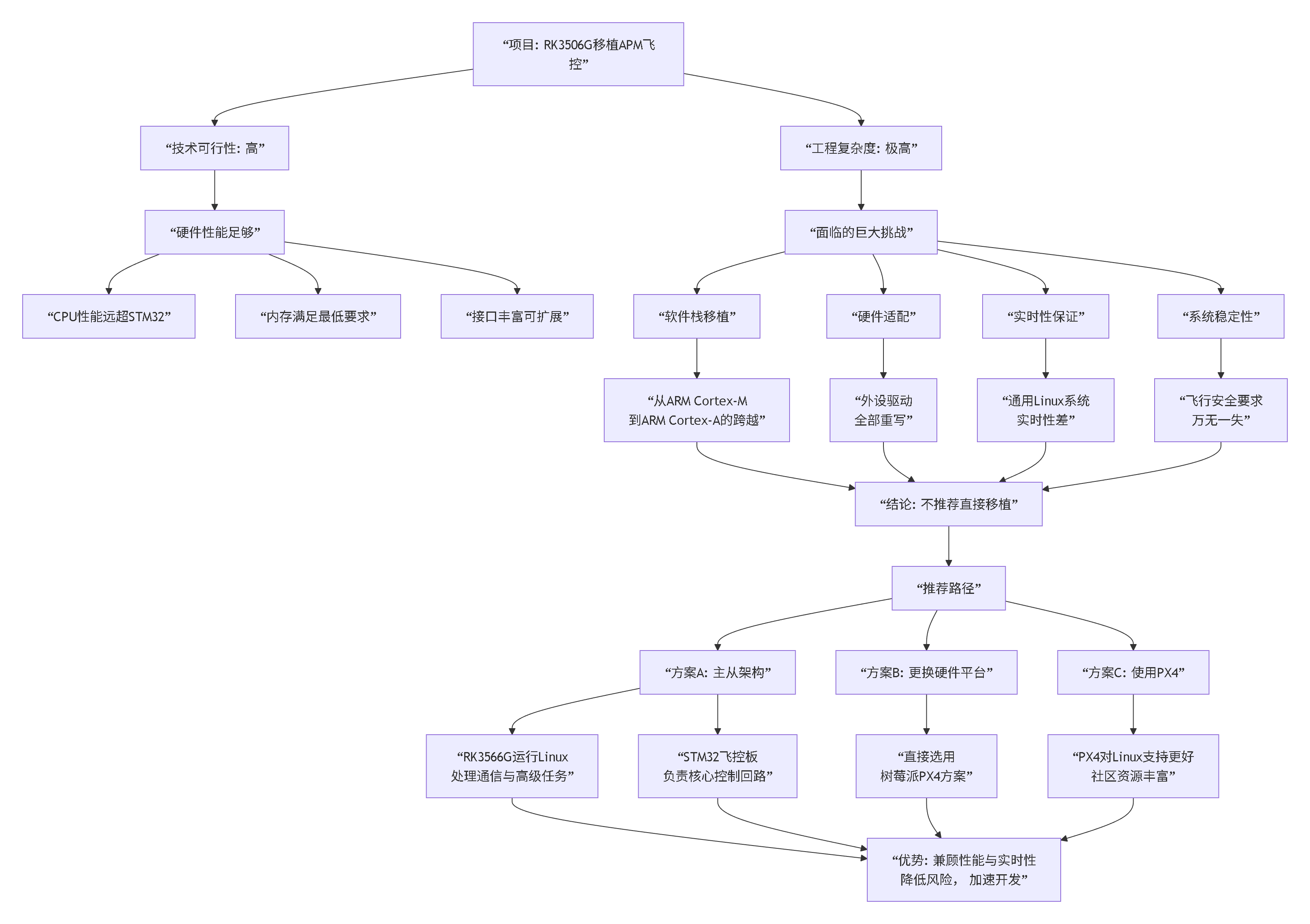
技术上完全可行,但工程复杂度极高,不推荐作为首个嵌入式项目。 这相当于"将一台为高性能计算机设计的专业工业软件,移植到一台资源极度受限的嵌入式设备上运行"。
下图清晰地展示了此次移植项目的技术可行性、面临的巨大挑战以及推荐的实施路径:
一、可行性分析(为什么说"可行"?)
| 组件 | APM飞控最低要求 | RK3506G 能力 | 是否满足 |
|---|---|---|---|
| CPU架构 | ARM Cortex-M4(如STM32F4) | ARM Cortex-A7 | ✅ 远超要求(A7性能远强于M4) |
| 主频 | ~150 MHz | 1.5 GHz (3核) | ✅ 远超要求 (10倍性能) |
| RAM | ~256 KB | 256 MB | ✅ 远超要求 (1000倍容量) |
| Flash | ~1 MB | 板载256MB, 可SD卡扩展 | ✅ 满足 |
| 数学运算 | 硬件FPU | 有VFPv4 FPU | ✅ 满足 |
从纯硬件性能看,RK3506G是"杀鸡用牛刀"。
二、巨大挑战(为什么说"艰难"?)
挑战不在于硬件性能,而在于软件生态、实时性和系统架构的根本性差异。
挑战1:软件栈的跨越
| 平台 | APM(传统飞控) | RK3506G(潜在方案) |
|---|---|---|
| 操作系统 | 裸机 或 实时操作系统 | 标准Linux |
| 开发环境 | ARM GCC, 裸机编程 | GCC, Linux应用编程 |
| 程序类型 | 单一固件, 完全控制硬件 | 用户空间应用程序 |
| 调度方式 | 基于优先级的抢占式调度 | Linux CFS(完全公平调度) |
核心矛盾 :APM是为微控制器和实时操作系统 设计的,它假设自己可以完全独占硬件 。而RK3506G通常运行非实时的通用Linux。
挑战2:实时性------飞控的生命线
飞控的控制循环 (如姿态解算、PID控制器)必须在毫秒甚至数百微秒 内完成,并且时间必须精确可预测。
| 任务 | 要求周期 | 在通用Linux上的风险 |
|---|---|---|
| 传感器读取 | 1-10 KHz | 可能被高优先级系统任务打断 |
| 姿态解算 | 1-4 KHz | 计算延迟抖动导致控制不稳定 |
| 电机控制 | 50-500 Hz | 输出信号时间不精确, 可能引发振荡 |
在标准Linux上,你无法保证一个用户态进程能精确地每2毫秒执行一次。
挑战3:硬件接口驱动
| 硬件接口 | APM(STM32) | RK3506G(Linux) |
|---|---|---|
| PWM输出 | 直接操作寄存器 | 需要通过内核PWM子系统 |
| 串口 | 直接操作UART寄存器 | 需要通过/dev/ttySx设备文件 |
| I2C/SPI | 直接读写 | 通过/dev/i2c-x, 有延迟 |
| GPIO | 直接位操作, 纳秒级响应 | 通过sysfs或libgpiod, 毫秒级延迟 |
你需要为RK3566G重写所有硬件抽象层,并确保其延迟和可靠性满足要求。
三、技术实现路径
如果坚持要移植,有以下三种技术路线,按难度排序:
路径1:主从模式(推荐,可行性最高)
这是最稳妥的方案,也是很多高端无人机采用的架构。
c
// RK3506G(主机,运行Linux)
// - 运行高级算法:视频流、目标识别、4G通信
// - 通过UART/SPI与飞控板通信
// STM32(从机,运行APM)
// - 专负责实时飞控:传感器读取、姿态解算、电机控制
// - 接收来自RK3566G的航点指令
// 优点:实时性有保障,开发风险低
// 缺点:需要两块板子,成本增加路径2:双核隔离+实时内核补丁
利用RK3506G的多核特性,但技术难度极大。
- CPU隔离:将其中一个CPU核心完全隔离出来。
- 打上PREEMPT_RT补丁:编译实时Linux内核。
- 线程绑定:将飞控关键线程绑定到隔离的CPU核,并设置为最高实时优先级。
bash
# 示例:设置实时任务
sudo chrt -f 99 taskset -c 2 ./arducopter
# 含义:以SCHED_FIFO优先级99, 运行在CPU2上即使这样,Linux的实时性仍不如专业的RTOS。
路径3:裸机移植(最困难)
完全不用Linux,在RK3506G上直接运行裸机程序 或轻量级RTOS。
- 从零开始编写启动代码 、时钟初始化 、内存管理。
- 为RK3506G的每个外设编写驱动程序。
- 将APM的硬件抽象层替换为针对RK3506G的实现。
这是工程量最大的方案,需要对芯片手册和编译工具链有极深的了解。
四、与PX4的对比
强烈建议考虑PX4,因为它对Linux的支持要好得多。
| 特性 | APM | PX4 |
|---|---|---|
| Linux支持 | 社区支持弱, 非官方 | 官方支持, 有Linux版本 |
| 架构 | 主要为裸机/RTOS设计 | 天生支持多机(机载计算机+协处理器) |
| 社区 | 活跃度下降 | 非常活跃, 更新快 |
| 文档 | 较老旧 | 更现代, 更完善 |
在RK3506G上运行PX4的Linux版本会比移植APM容易一个数量级。
五、具体步骤(如果坚持要移植APM)
-
环境准备
- 获取RK3506G的数据手册 和参考代码。
- 搭建交叉编译工具链。
- 编译或获取可启动的固件。
-
基础系统
- 先让RK3506G能运行起来, 实现串口输出 、LED控制。
- 移植或实现基础驱动:GPIO、PWM、UART、I2C、SPI。
-
APM代码分析
- 下载APM代码, 重点分析
libraries/AP_HAL(硬件抽象层)。 - 理解APM的调度机制 (
hal.scheduler)。
- 下载APM代码, 重点分析
-
实现HAL层
- 在
libraries/AP_HAL下创建AP_HAL_RK35XX目录。 - 实现
AnalogIn、GPIO、RCInput、RCOutput、Scheduler等关键虚函数。
- 在
-
测试与调试
- 先让代码能编译通过。
- 逐个模块测试:先调试UART, 再调试I2C传感器, 最后调试PWM输出。
- 务必使用无人机调试架进行实物测试!
六、总结与建议
| 方案 | 可行性 | 风险 | 推荐指数 | 适合人群 |
|---|---|---|---|---|
| 主从模式 | ✅✅✅ | 低 | ⭐⭐⭐⭐⭐ | 所有人 |
| PX4移植 | ✅✅ | 中 | ⭐⭐⭐⭐ | 有Linux经验者 |
| APM移植 | ✅ | 高 | ⭐ | 芯片原厂工程师 |
最终建议:
-
如果你是学生或爱好者 :采用主从模式。用RK3506G做机载计算机处理视频、AI等高级任务,用现成的Pixhawk飞控板负责飞行控制。这是最安全、最快捷的方案。
-
如果你是企业或资深开发者 :考虑移植PX4 到RK3506G,并搭配PREEMPT_RT实时内核补丁。PX4对Linux的支持更好,社区更活跃。
-
如果你想挑战技术极限 :可以从为RK3506G编写一个简单的裸机飞控开始,而不是直接移植庞大的APM。这样能更好地理解底层硬件和飞控原理。
记住,在无人机开发中,稳定性永远高于性能。 一个200MHz的Cortex-M4飞控如果稳定可靠,远胜于一个1.5GHz的Cortex-A7但存在随机延迟的飞控。