
本文给出当前前沿研究的课题推荐,基于大量的数据整合、识别、归纳和一些个人的想法。试图在导航、定位的方向研究中提供有价值的研究问题,为项目选题奠定基础。
个人观点,仅供参考,也欢迎大家共同讨论
文章目录
基于视觉(像素坐标)与IMU的目标/自身运动估计是一个经典的多传感器融合问题,结合了图像处理和惯性测量单元(IMU)数据,用于估计目标或自身的运动轨迹。下面是一个课题和相应的MATLAB代码示例,可以作为参考。
课题背景
随着无人驾驶、机器人导航等领域的发展,基于视觉与IMU的运动估计方法(Visual-Inertial Odometry, VIO)受到了广泛关注。该方法结合了图像处理与惯性测量单元(IMU)数据,通过传感器融合实现对目标或自身运动的实时估计。视觉传感器提供的是二维像素坐标数据,IMU则提供三维加速度和角速度数据。
通过对视频流数据(如相机图像)与IMU传感器数据的融合,实时估计机器人或目标的运动状态(位置、速度、姿态等)。
课题要求参考
- 使用相机和IMU数据进行联合运动估计。
- 估计目标或自身在三维空间中的位置、速度和姿态。
- 使用滤波方法(如扩展卡尔曼滤波,EKF)进行状态估计与融合。
- 提供一个模拟或实际的视觉和IMU数据集,使用MATLAB进行处理与分析。
- 可视化估计结果,例如路径轨迹、姿态变化等。
课题实现思路
-
数据预处理:
- 对输入的图像数据进行特征提取和匹配(如使用SIFT、SURF、ORB等方法)。
- 通过IMU数据获取加速度、角速度,并进行积分得到速度和姿态变化。
-
状态估计与融合:
- 使用视觉信息(图像特征匹配)来计算相机的运动(位置、方向)。
- 使用IMU信息(加速度和角速度)来估计相机的速度和姿态变化。
- 利用扩展卡尔曼滤波(EKF)进行视觉和IMU数据的融合。
-
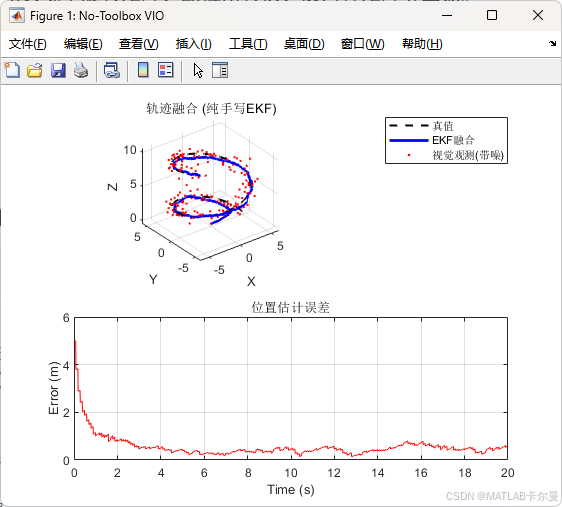
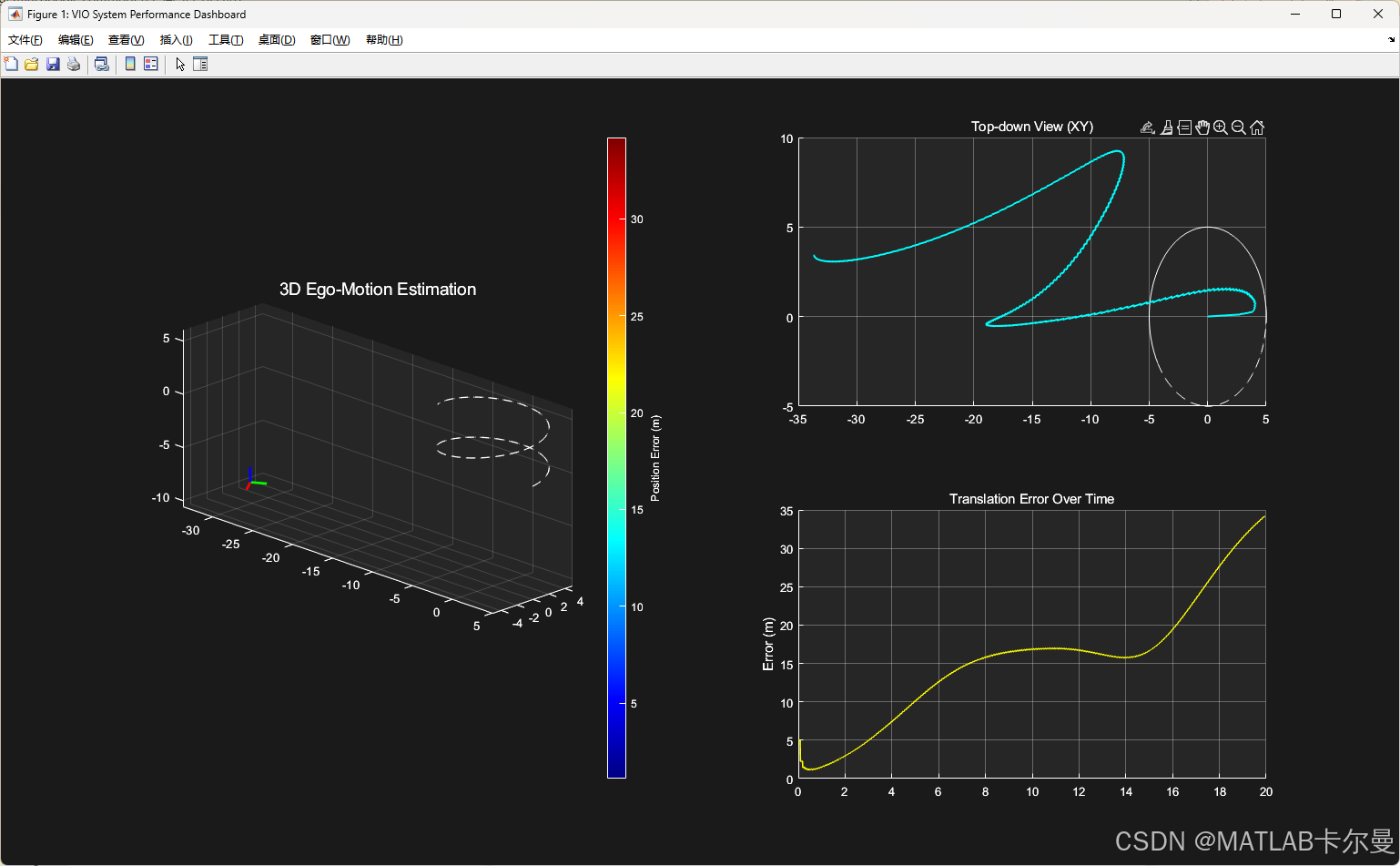
轨迹估计与结果可视化:
- 根据滤波后的估计结果,绘制目标的运动轨迹图。
- 计算与真实轨迹的误差,并进行评估。
算法代码
输入: * 高频 IMU 数据:加速度 ,角速度
- 低频视觉数据:位置 ,姿态
输出: * 最优估计状态向量
代码逻辑分层说明
| 模块 | 对应数学概念 | 在 MATLAB 代码中的位置 |
|---|---|---|
| 运动模型 | 非线性微分方程积分 | X_est(1:3) = X_est(1:3) + X_est(4:6)*dt |
| 坐标变换 | 旋转矩阵 | euler2rot 函数 |
| 误差动力学 | 雅可比矩阵 | 决定了 阵如何在没有视觉时"膨胀" |
| 数据关联 | 时间戳对齐 | if mod(k, vis_ratio) == 0 |
代码解读
-
数据初始化:
初始化状态变量(位置、速度、姿态)并设定时间步长。
-
IMU数据处理:
使用IMU的加速度和角速度数据更新速度和姿态。
-
视觉数据处理:
使用图像匹配点(假设已经得到图像数据)来估计位置变化。这个步骤可以通过求解PnP问题(从图像中估计相机位姿)来实现。
-
状态更新与融合:
使用扩展卡尔曼滤波器(EKF)对IMU和视觉数据进行融合,预测与更新状态。
-
可视化结果:
绘制目标或自身的三维运动轨迹。
运行结果
拓展选项
- 更复杂的传感器融合: 可以结合其他传感器,如GPS,进行更精确的定位。
- 优化算法: 使用非线性优化方法(如Bundle Adjustment)进一步提高运动估计精度。
如需帮助,或有导航、定位滤波相关的代码定制需求,可通过下方卡片联系作者