一. 产品介绍
安路科技 SALDRAGON®(以下简称 DR1)系列器件延续安路 FPSoC® 家族,集成了硬
核处理器系统双核 ARM Cortex-A35 或 64 位 RISC-V、FPGA 可编程逻辑和可编程加速引擎,
形成了硬核高性能 ARM v8 处理器产品或高性能 RISC-V 64bit 处理器
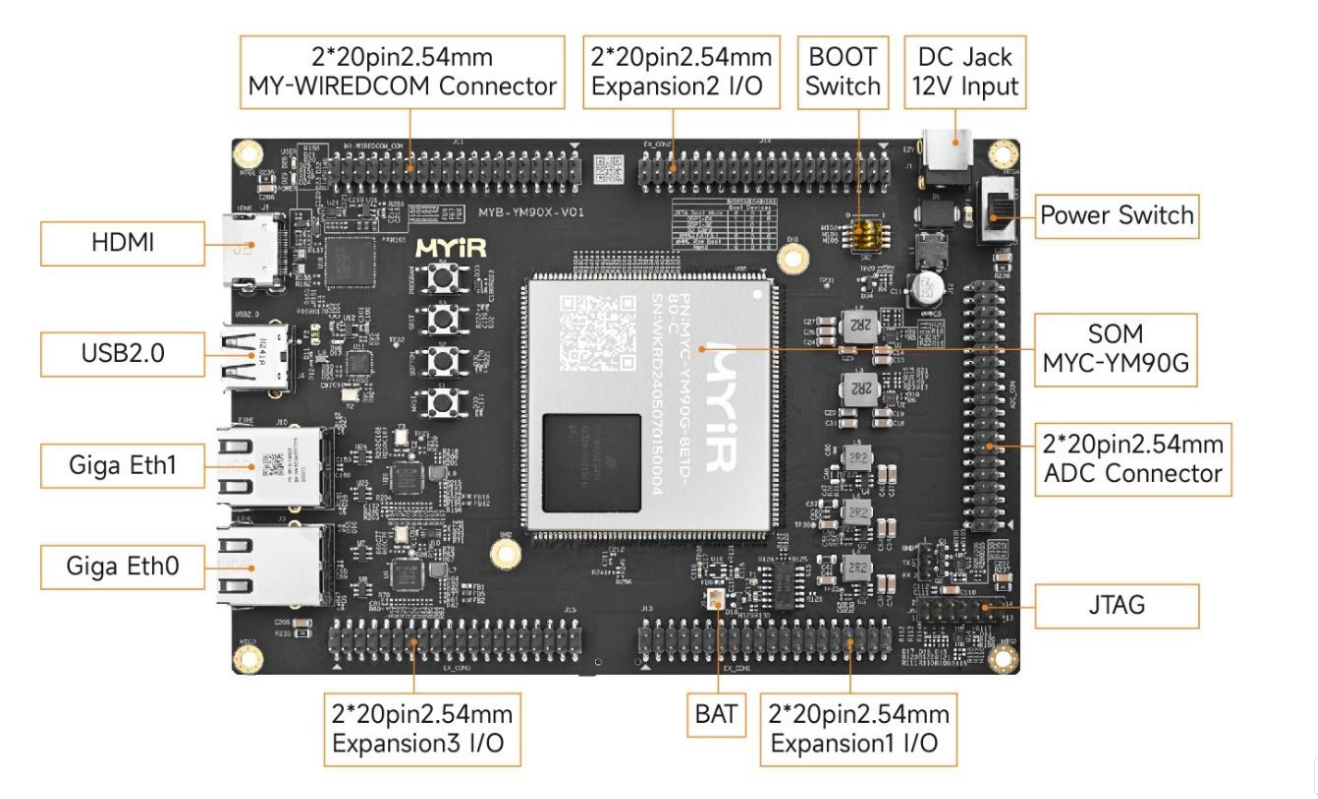
板子的外观图:
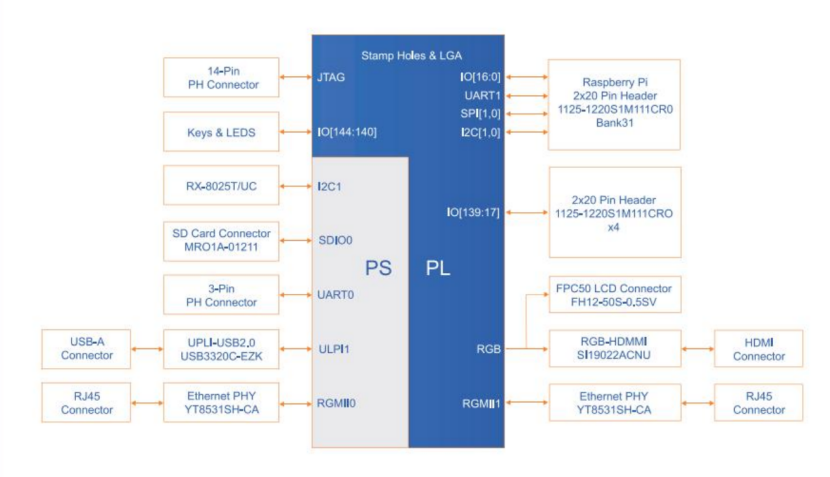
二.芯片介绍(DR1M90GEG484)
拥有1GB DDR3内存,8GB eMMC 存储器,QSPL 32MB
PL部分:可编程逻辑 95k LEs,10K DFF,5.4Mb Bram,240 DSP48
可编程 IO:支持 LVCMOS1.5V-3.3V I/O LVDS_18 LVDS 25,200xIC
PS部分:2xCortex-A35@1GHz
集成 0.4 TOPS NPU,完整端侧部署工具链
集成 JPU,支持 JPEG 压缩解压缩
2xCAN-FD,2xUART,2xSPI,2x12C
2x 三速以太网,2xUSB2.0,2xSD/SDIO/Emmc5.1 控制器
三. 软件资源
米尔官方提供了大量的资源可以参考,可以获取全部的 Baremetal 开发程序,BSP 源码及丰富的软件开发手册。
多套操作系统镜像文件
myir-image-core:米尔定义的一个精简的,启动快速,稳定,实时的系统,它是以 Yocto
构建的不包括 GUI 界面的镜像,但包含完整的硬件驱动,常用的系统工具,调
试工具等。
myir-image-full:以 Yocto 构建的全功能的镜像,包含所有的完整的硬件驱动,常用的
系统工具,调试工具等,支持使用 Shell, C/C++,QML, Python 等应用开发环境。
四. 快速入门
4.1 软件的准备
因为之前我也是接触过ZYNQ的芯片,所以他们都是有各自芯片的开发环境的,所以我们现在要安装安路的TD和FD工具
TD开发工具只包含FPGA工程开发,新版本TD_5.9.1_DR1_ES1.1既包含普通FPGA芯片开发也包含DR1系列芯片开发,如果使用的是DR1器件,最好下载TD_5.9.1_DR1_ES1.1版本或者更高的版本
FD工具为ARM端的裸机开发工具,主要使用裸机来测试PS端的外设接口,比如
UART,IIC,SPI,CAN接口等,对于DR1芯片来说,主要用于PL和PS交互使用
4.2 TD/FD软件的安装
TD/FD软件的安装可以在安路的官方网站上注册帐号https://www.anlogic.com,也可以在我自己找到的这个网站下直接下载,安装的步骤都很简单,这个就不细说了
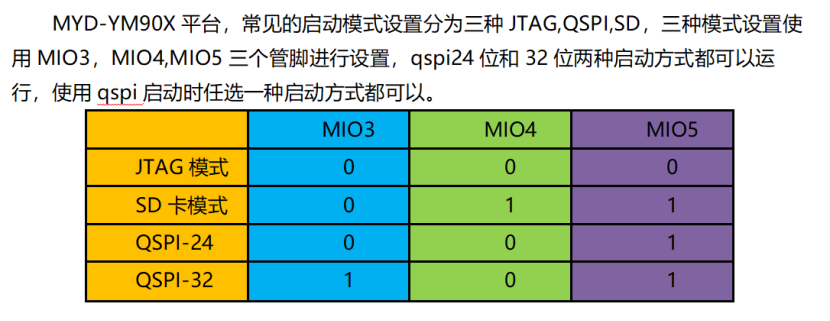
4.3 启动方式介绍
4.4 PS部分ARM的串口输出打印测试
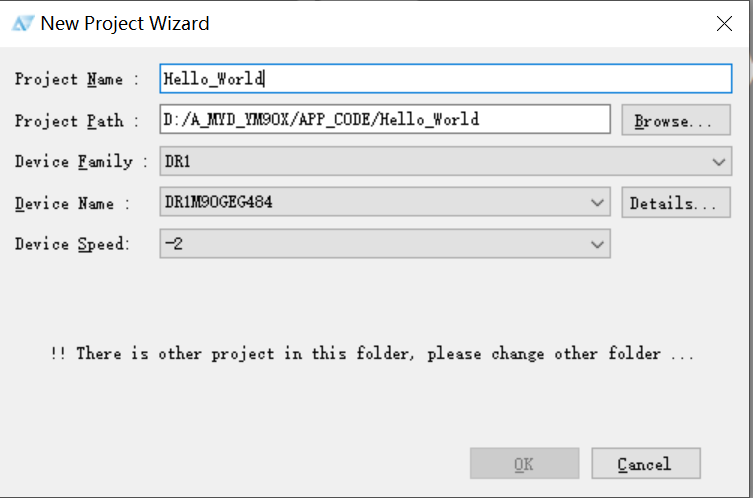
- 新建Hello_World 工程,在TD软件下创建
①新建的工程名
②工程存储路径,也就是我们上面新建的hello_world空白文件夹路径
③芯片系列,我们这个开发板属于DR1系列
④芯片型号,开发板型号为DR1M90GEG484
⑤芯片速度等级为-2
(2)创建好的工程界面
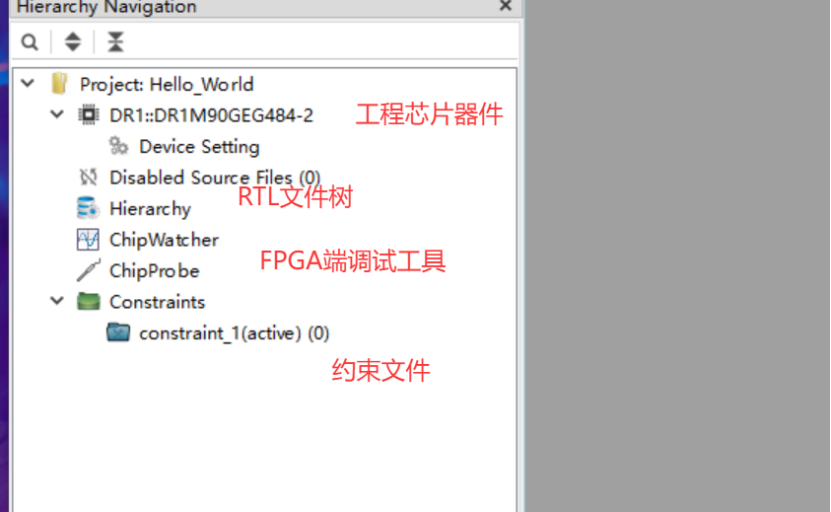
(3)新建Design Integrator工程
方便用户在TD中使用IP,避免手写IP端扣间连接的重复操作,开发了Design Integrator工具,其主要功能是:根据用户定制的ip以及端口,在连线后生成对应RTL代码)
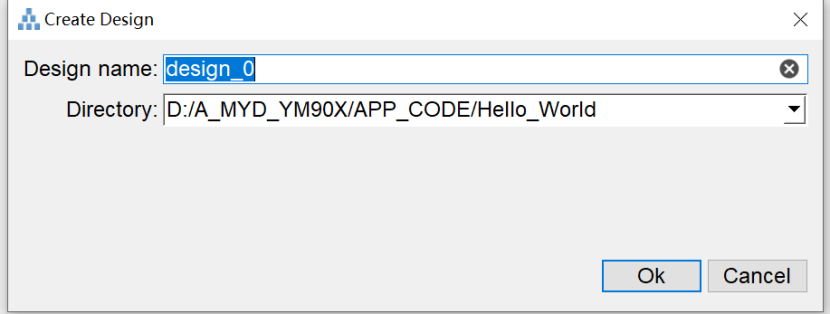
- 新建Design 工作区
- 在新界面点击点击Flow-->Create Design新建Design工作区
- 填写填写Design工作区名称和存储路径。要选择一致
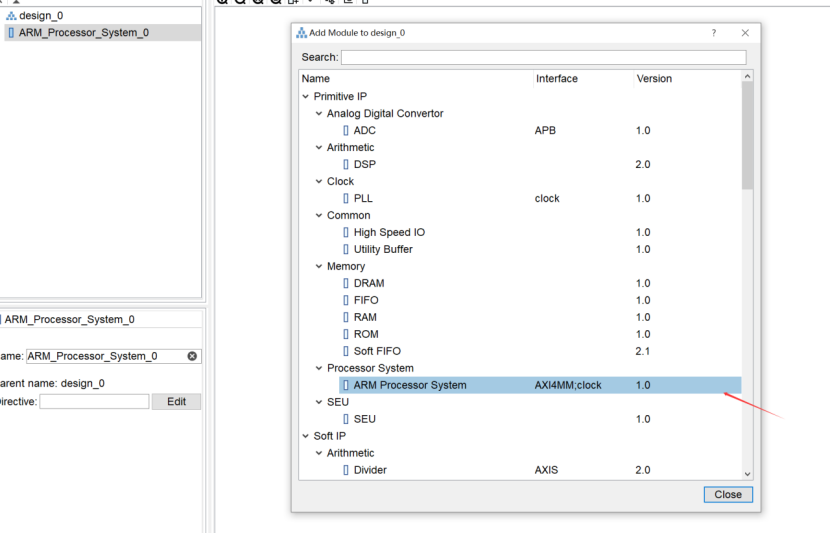
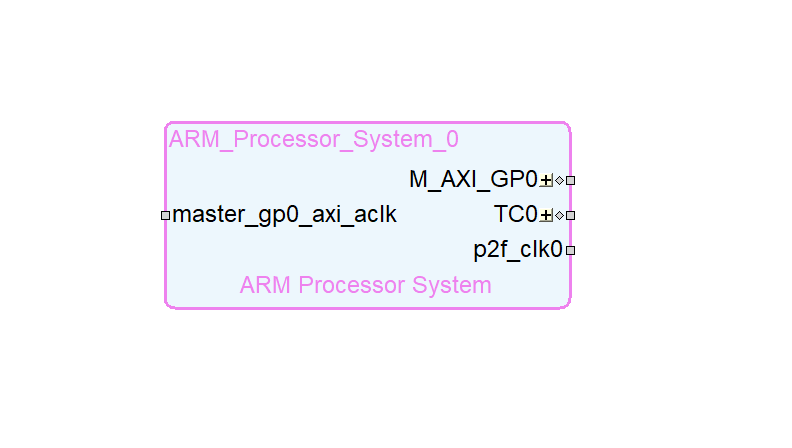
添加ARM的CPU模块
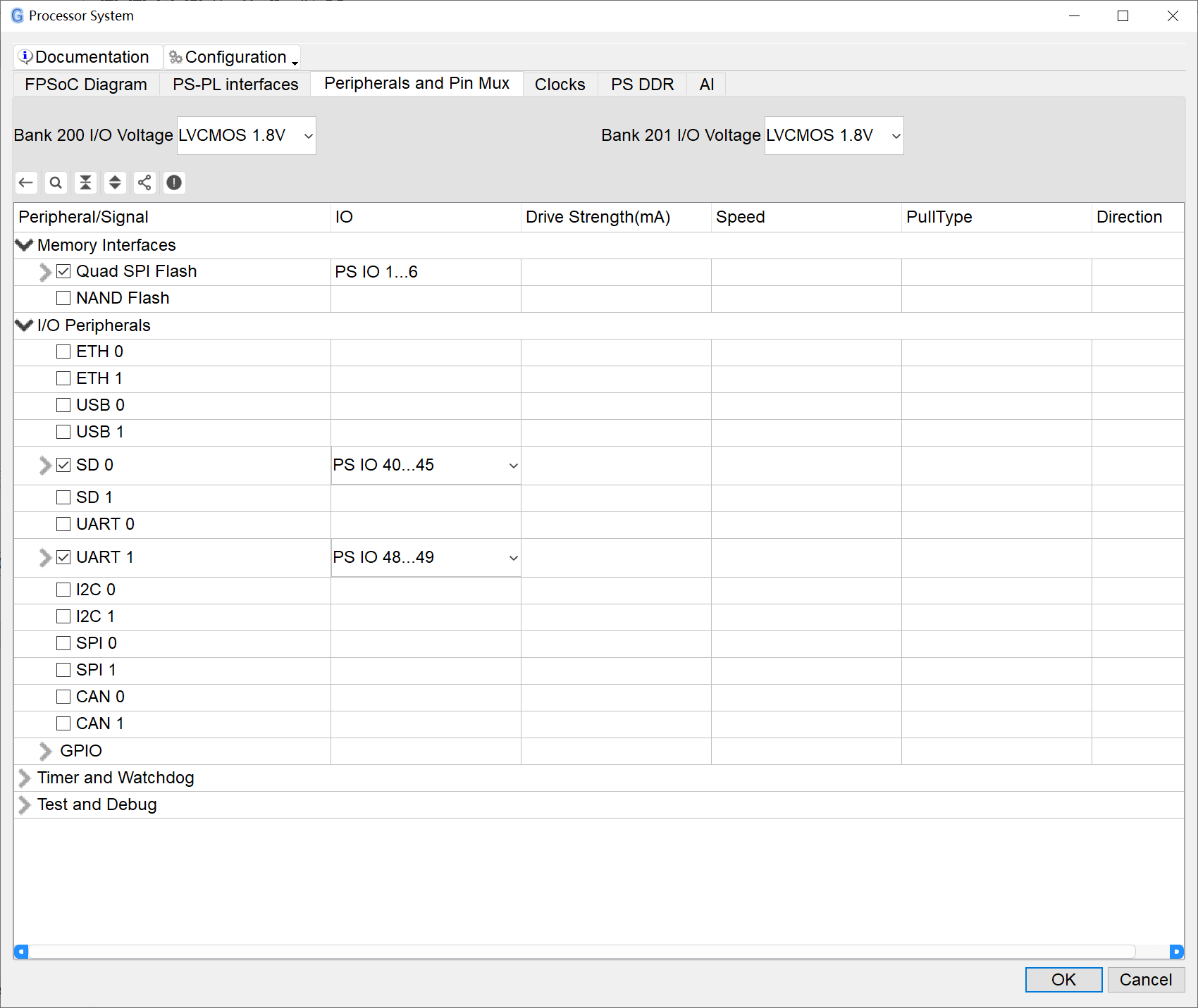
添加arm端配置
①设置arm端bank200电源为1.8V
②设置arm端bank201电源为1.8V
③使能Quad SPI Flash,工程添加qspi设备
④使能SD_0,工程添加sd卡接口
⑤使能uart,工程添加uart串口
因开发板有JTAG,SD,QSPI三种启动方式,我们添加sd和qspi,后续可以使用这两种启动方式启动
创建好的RAM核心
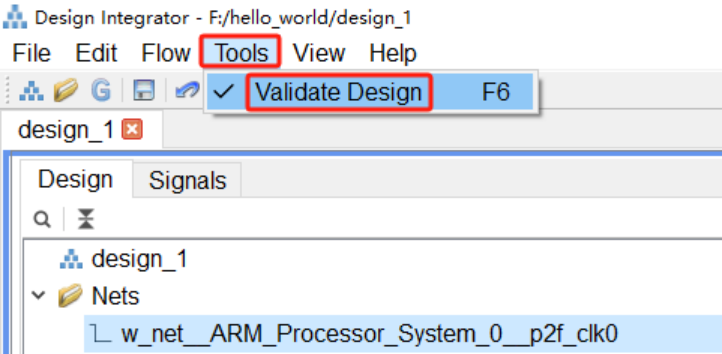
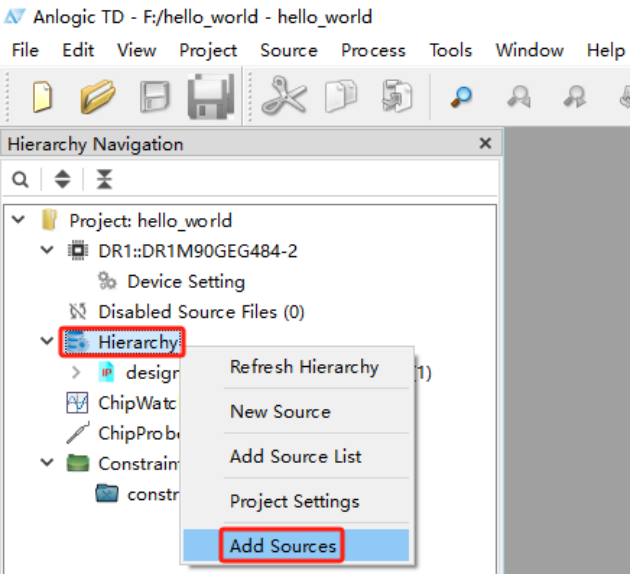
导入PS端的配置,检查PS端工程设计是否正确
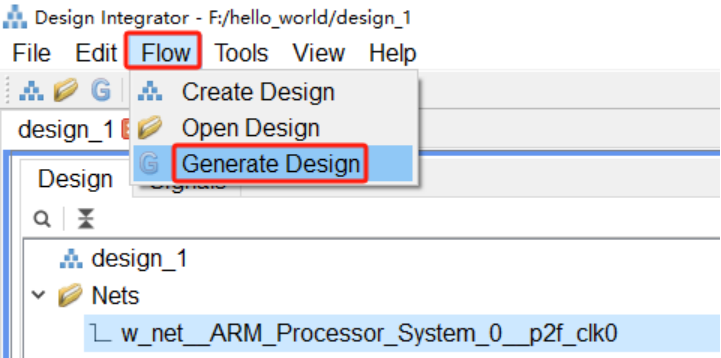
将PS的配置生成IP
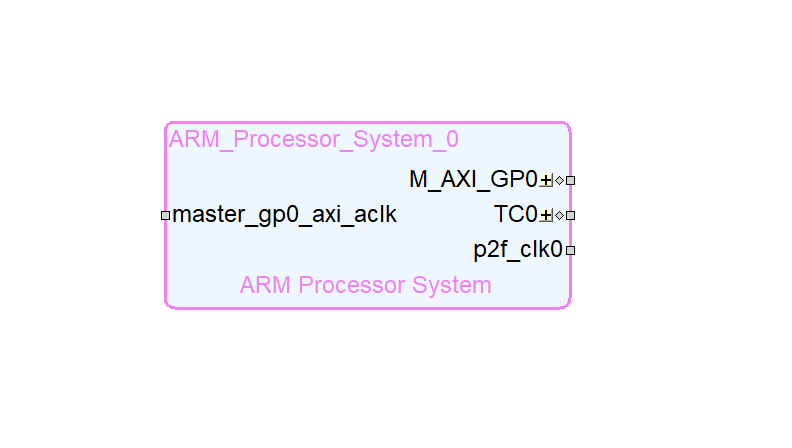
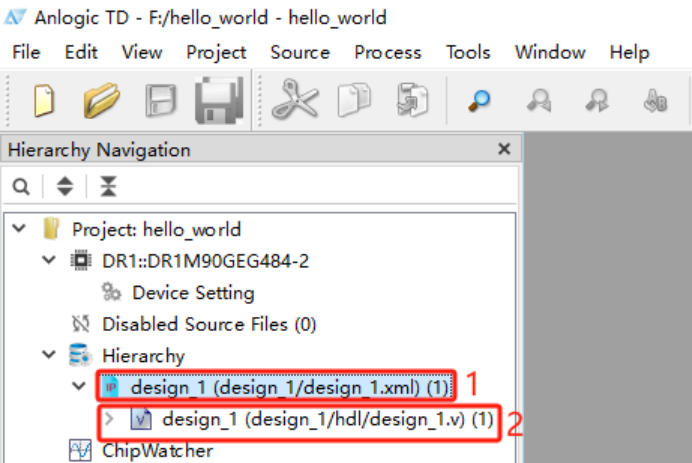
- arm端生成的ip模块
①arm端综合后生成的ip模块
②arm端ip模块的.v文件,fpga可以例化arm模块,从而和arm端进行数据交互
添加顶层文件
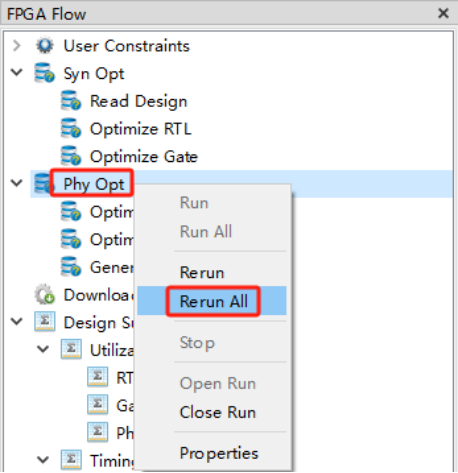
生成bit文件
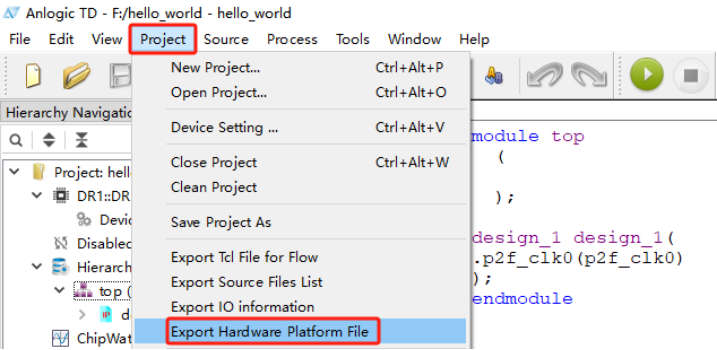
导出hpf文件
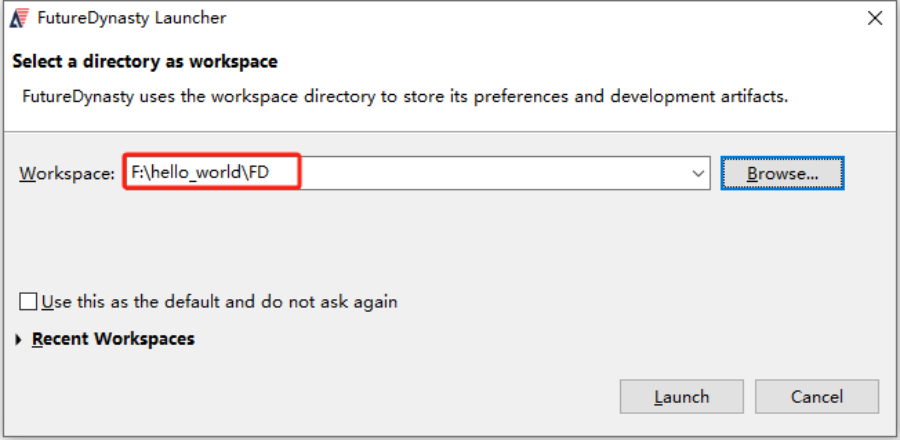
新建FD工程文件夹
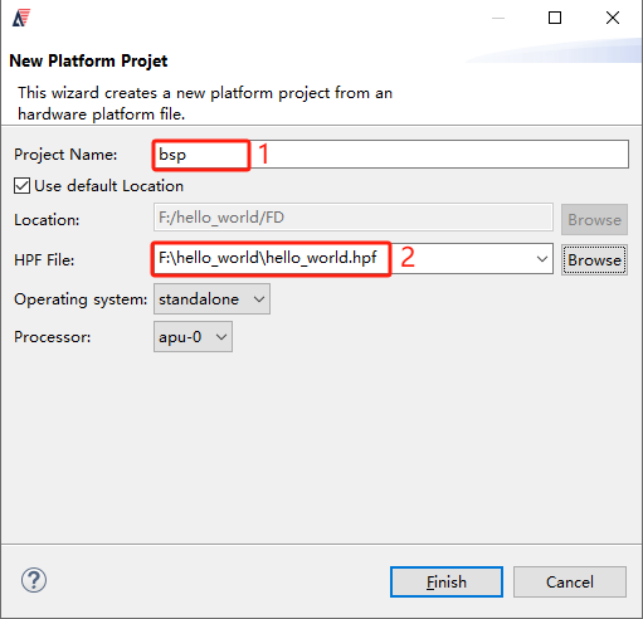
新建BSP文件
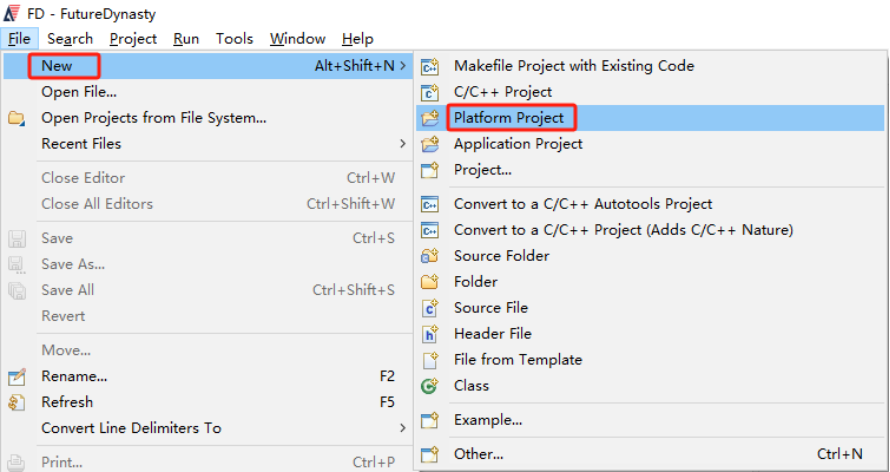
①填写工程名为bsp
②添加hpf文件
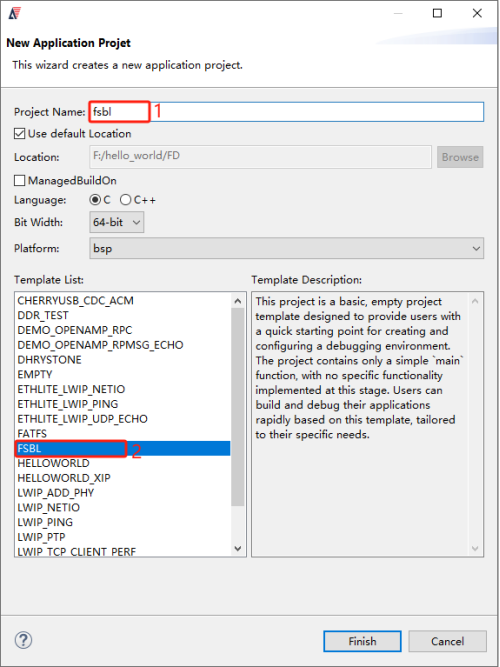
新建 fsbl文件
①填写工程名为fsbl
②选择FSBL模板
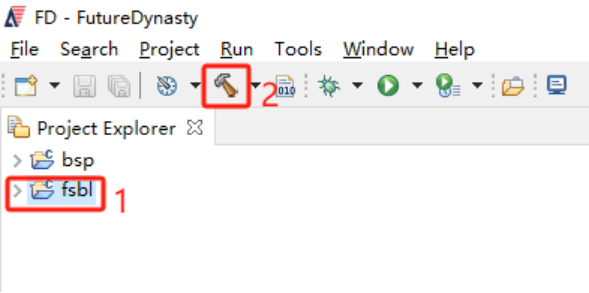
编译fsbl文件
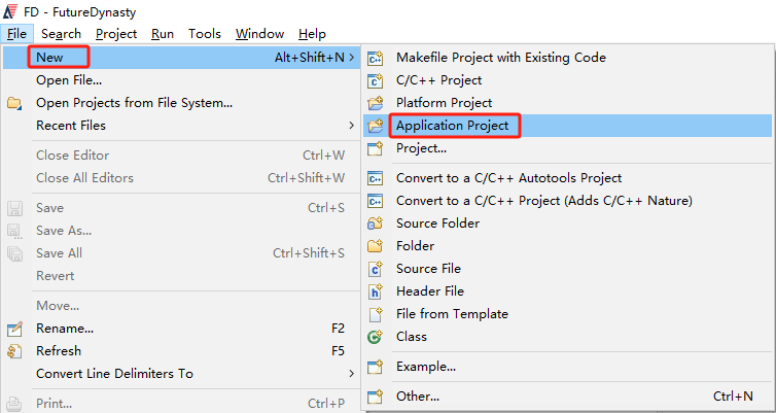
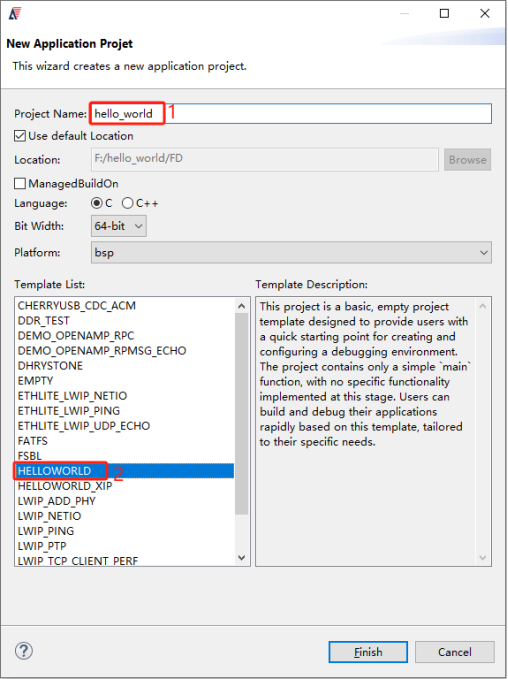
新建 Hello_world工程
①填写工程名为hello_world
②选择HELLOWORLD模板
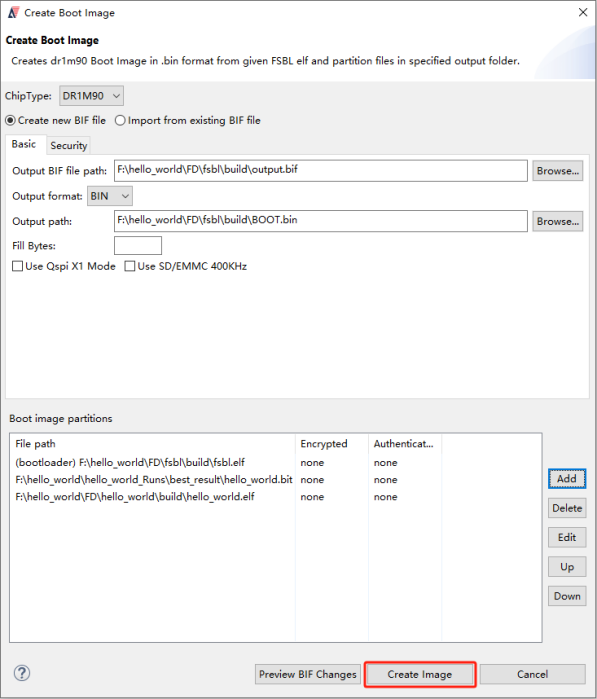
生成bin文件设置
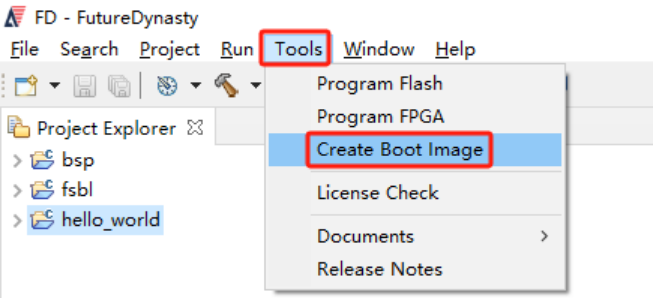
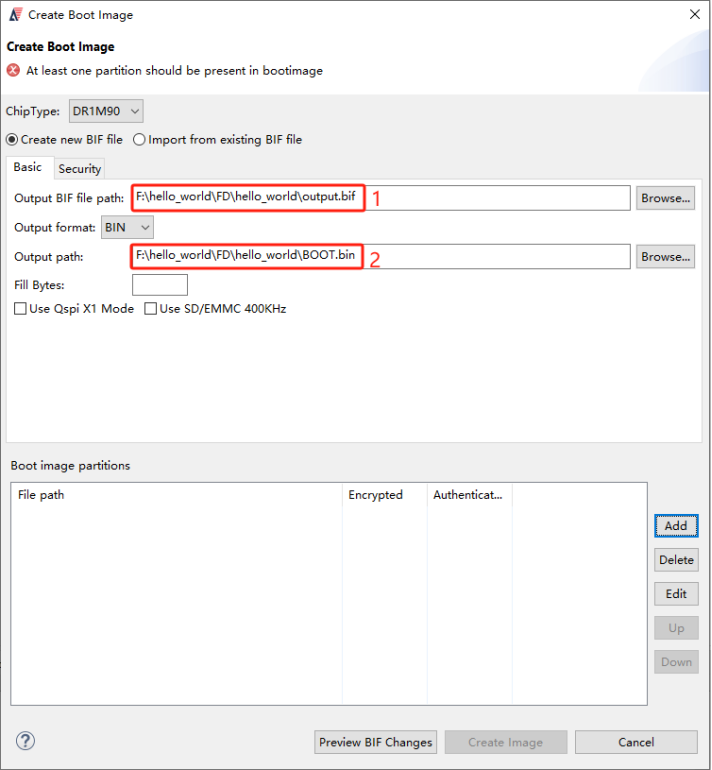
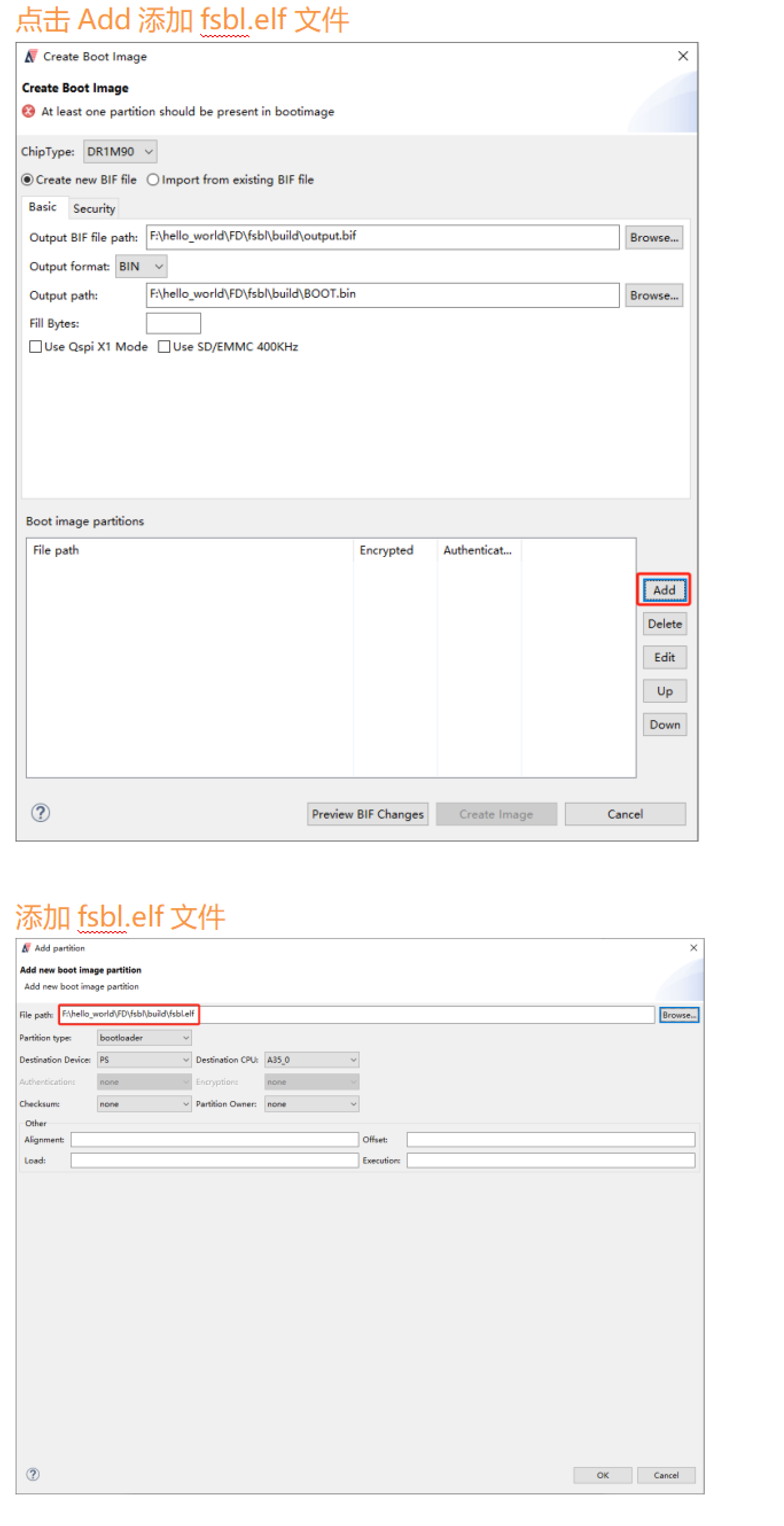
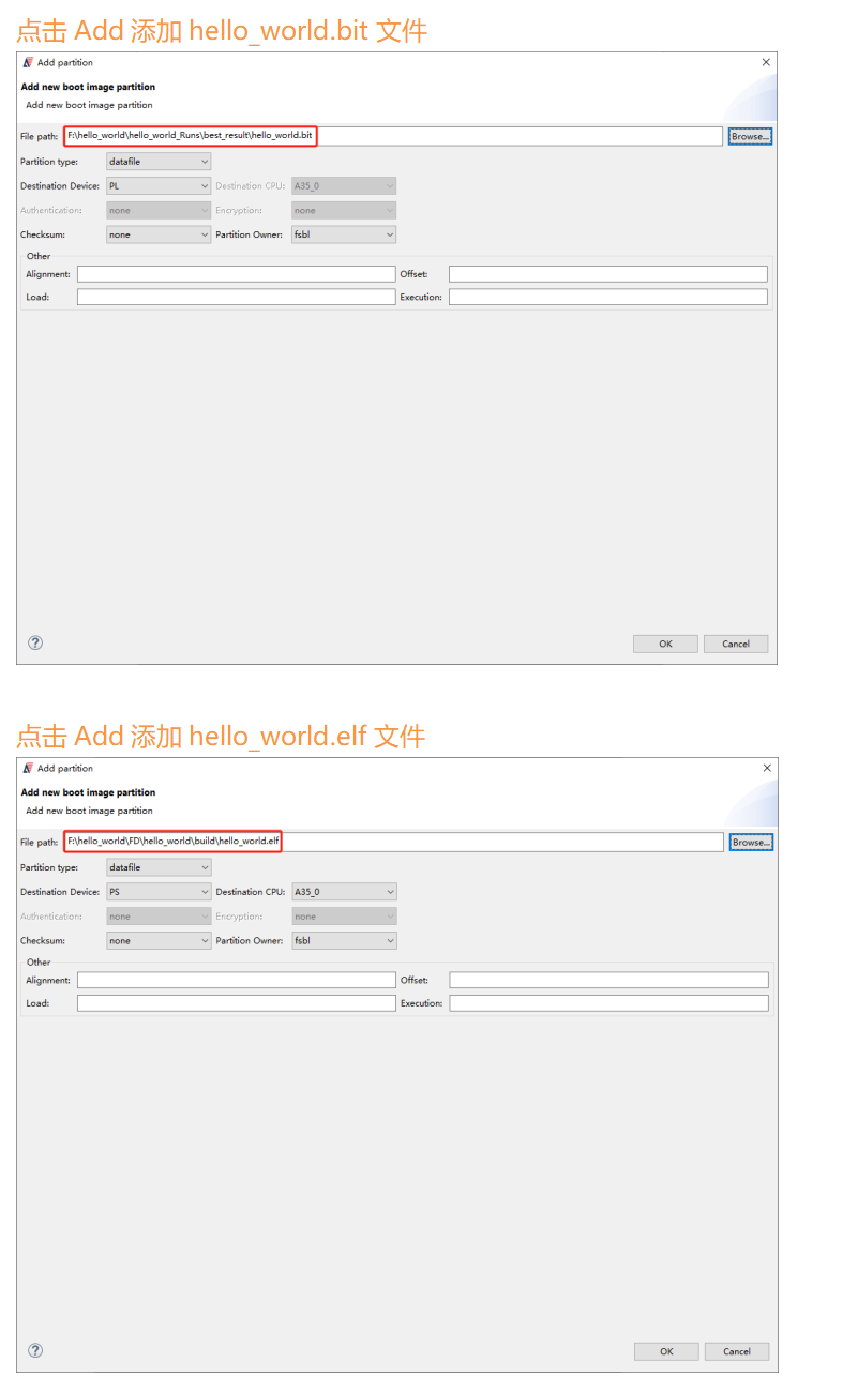
输出bin文件
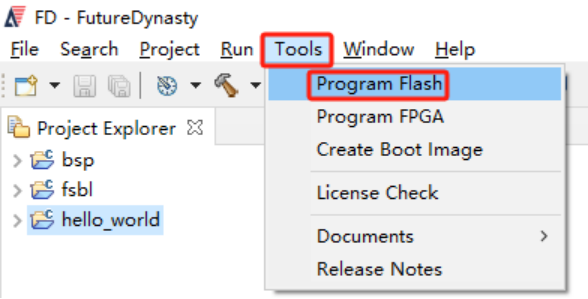
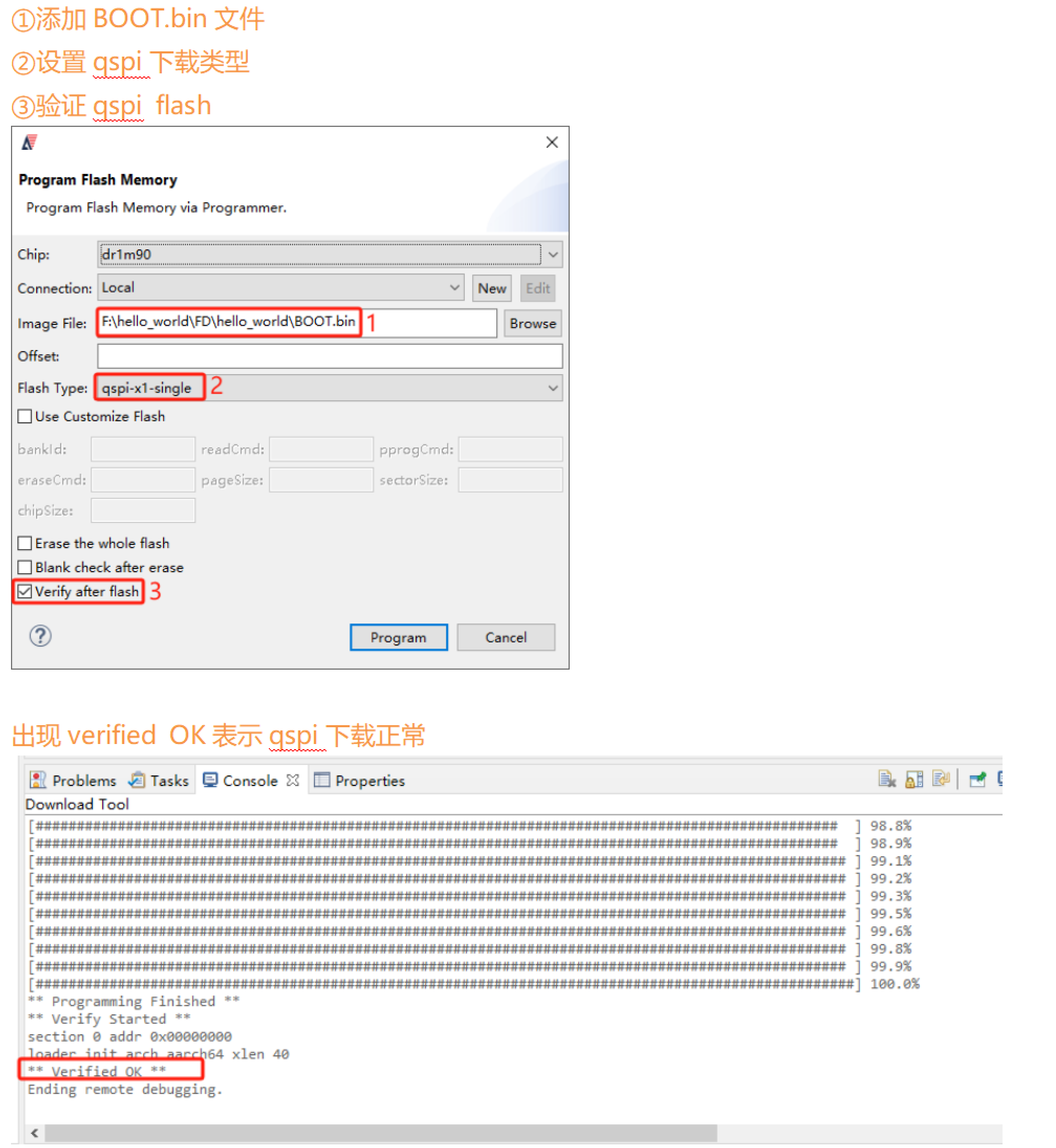
程序固化
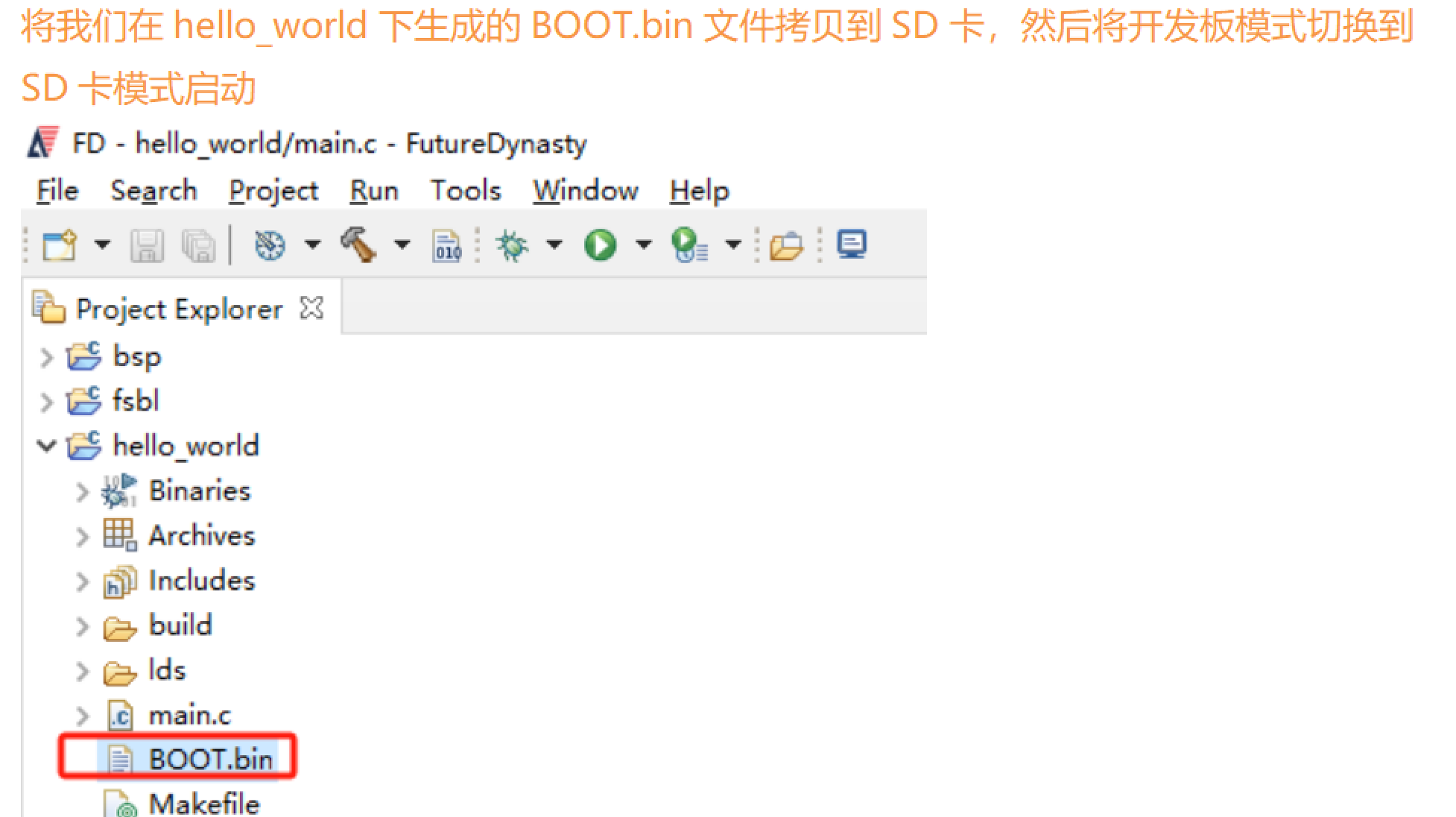
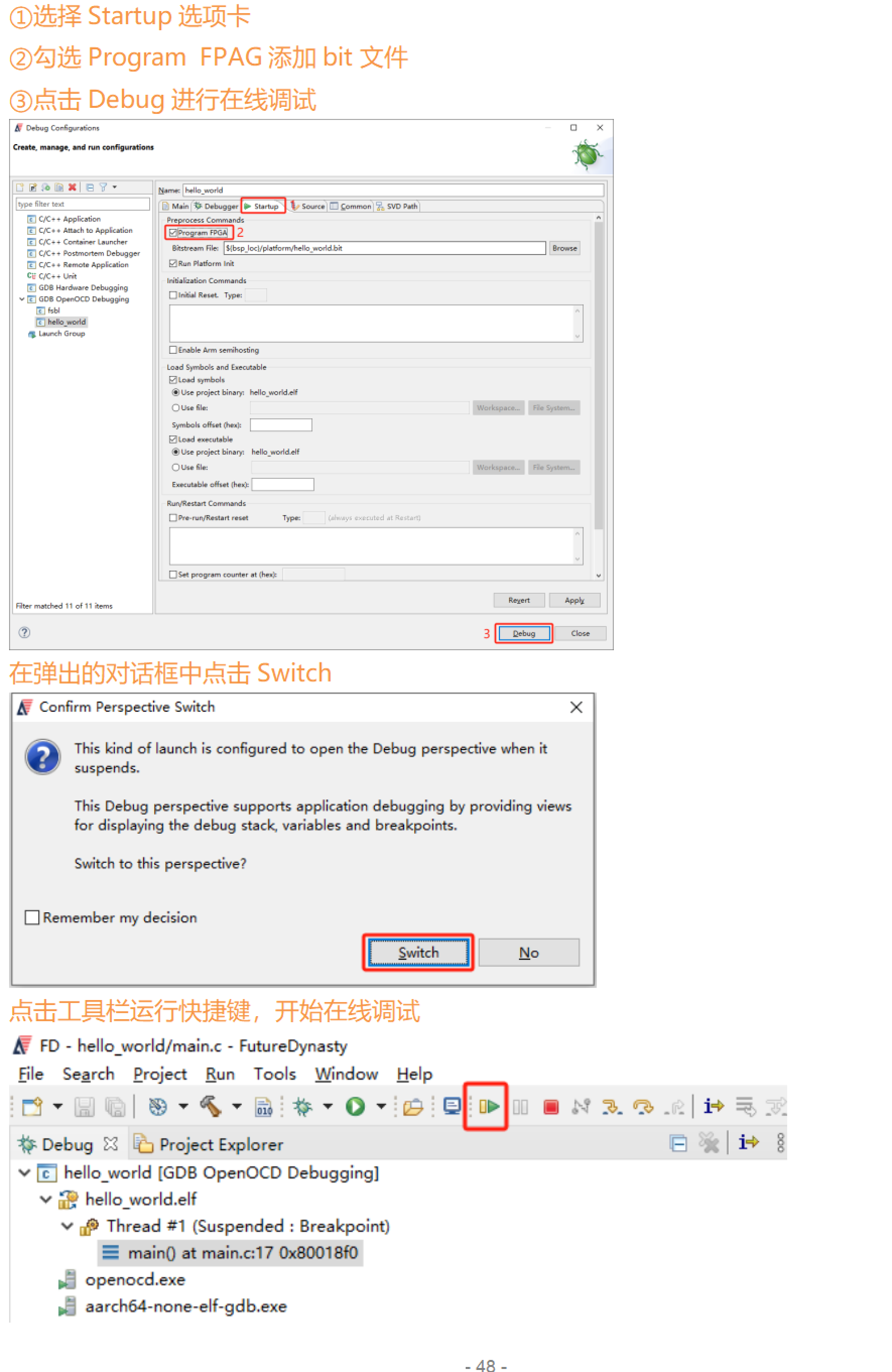
SD卡启动
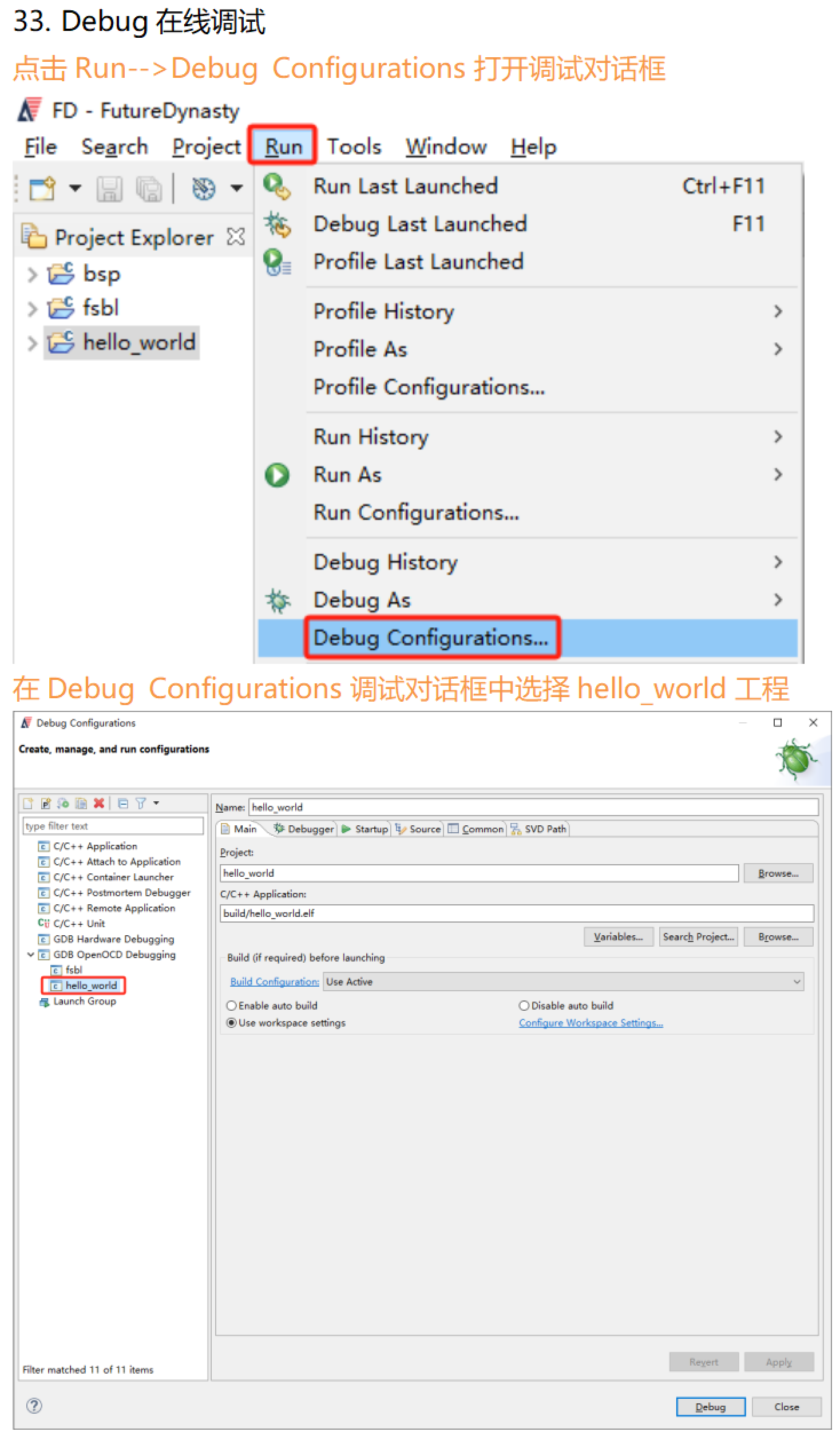
调试结果

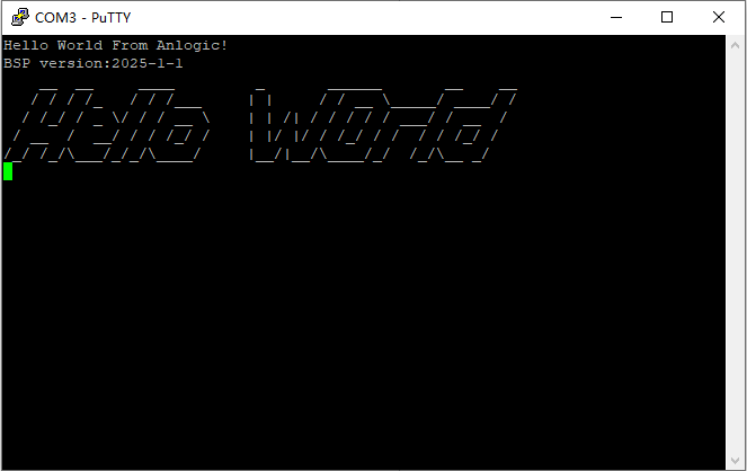
putty串口输出打印hello_world
总结:
本次的开发板调试之旅比较艰难,在找资料和开始学习都不是很顺利,但是好在米尔官方的资料比较明确和齐全,帮我踩了很多坑,总体来说入门还是很简单的,以上就是我对这个开发板的串口调试,技术有限,仅供参考。