SparseWorld-TC 论文总结(理想)
关键图标说明
一、相关工作及劣势 (Related Work & Limitations)
1. 3D占用预测相关工作
传统方法
- 基于VAE的方法 :使用变分自编码器(VAE)生成离散的占用标记
- 代表性工作:OccWorld, OccLLaMA, Occ-LLM等
- 劣势:离散化过程限制了模型的表示能力,无法捕捉连续的空间信息
基于BEV投影的方法
- BEV-based方法 :采用鸟瞰图(BEV)投影及其显式的几何先验
- 代表性工作:DOME, I2World, COME, Occ3D, OccSora等
- 劣势 :
- 依赖显式几何先验,限制了模型对空间和时间依赖性的有效捕捉
- BEV投影过程可能丢失重要的空间细节信息
- 难以处理复杂的3D场景结构
其他相关方法
- RenderWorld:基于渲染的世界模型
- PreWorld:预测性世界模型
- OccVar:变分占用预测
- DFit-OccWorld:扩散拟合占用世界模型
- GaussianAD:基于3D高斯的方法
- DynamicCity:动态城市场景建模
2. 主要劣势总结
- 离散化限制:基于VAE的方法使用离散标记,限制了连续空间表示能力
- 几何先验依赖:BEV投影方法过度依赖显式几何先验,限制了模型的灵活性
- 时空依赖性捕捉不足:传统方法难以有效捕捉复杂的时空依赖关系
- 多帧预测能力有限:现有方法在预测多帧未来占用时表现不佳
二、核心思想 (Core Idea)
1. 问题动机
- 现有3D占用预测方法主要依赖离散标记或BEV投影,限制了模型的表示能力
- 需要一种能够直接端到端预测多帧未来占用的方法
- 需要更好地捕捉时空依赖性,而不依赖显式几何先验
2. 核心方法
稀疏占用表示 (Sparse Occupancy Representation)
- 绕过BEV投影:直接从原始图像特征端到端预测多帧未来占用
- 避免离散化:采用连续表示,提升模型的表示能力
- 稀疏性优势:只关注有意义的占用区域,提高计算效率
轨迹条件预测 (Trajectory-Conditioned Prediction)
- 条件生成:在给定未来轨迹的条件下预测占用
- 灵活的场景理解:能够根据不同的未来轨迹生成相应的占用预测
- 动态适应:适应不同的驾驶场景和轨迹规划需求
基于Transformer的架构
- 受GPT和VGGT启发:借鉴基础视觉和语言模型中基于注意力的Transformer架构
- 时空注意力机制:有效捕捉空间和时间依赖性
- 端到端学习:直接从图像特征到占用预测的端到端训练
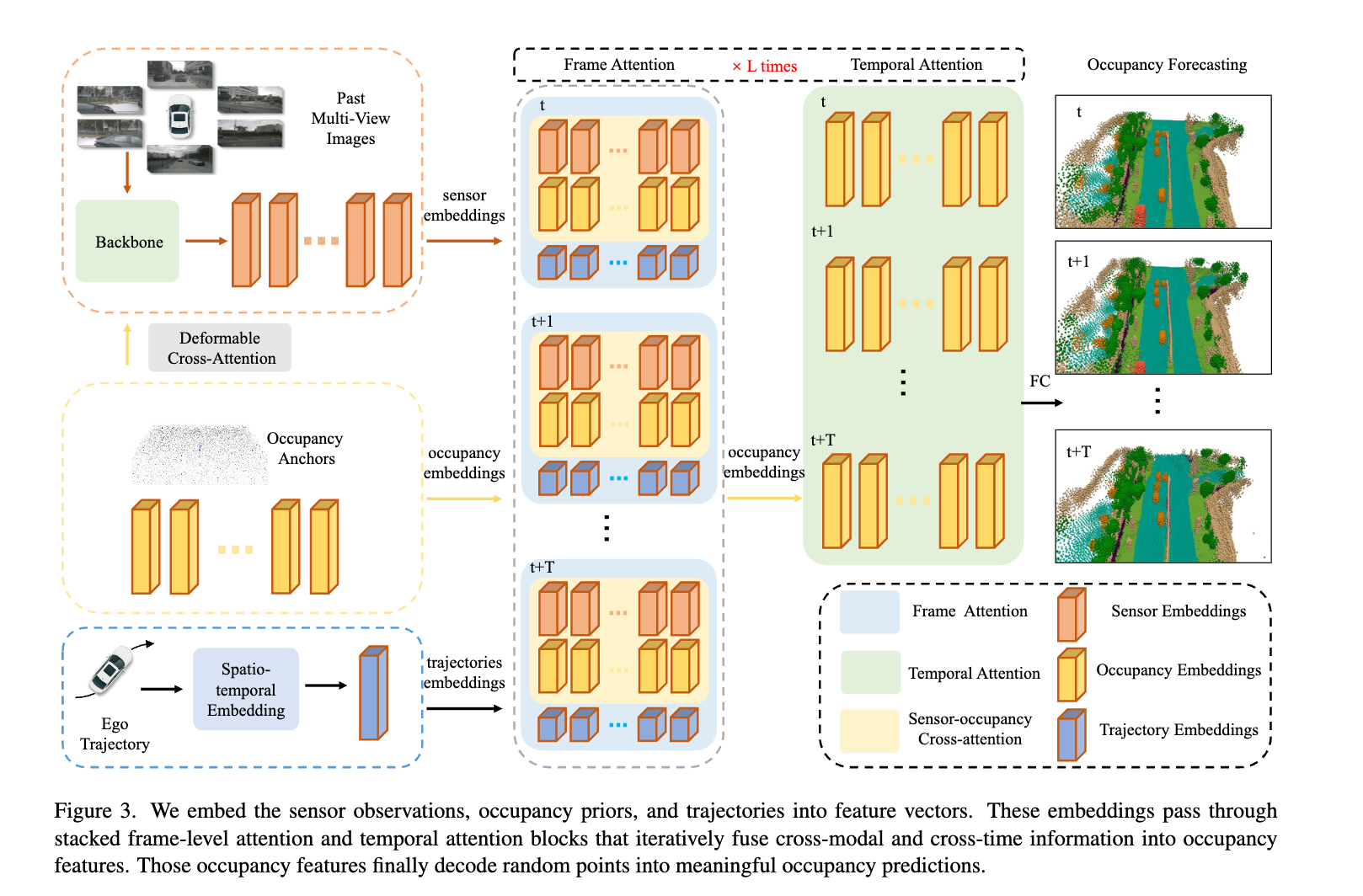
3. 技术架构
输入图像特征 → Transformer编码器 → 轨迹条件编码 →
稀疏占用解码器 → 多帧未来占用预测关键组件:
- 图像特征提取器:从多视角图像中提取特征
- 轨迹条件编码器:将未来轨迹编码为条件信息
- 稀疏占用解码器:基于条件信息生成稀疏占用表示
- 多帧预测模块:预测多个未来时间步的占用情况
三、创新点 (Contributions)
1. 方法创新
直接多帧预测
- 端到端架构:直接从原始图像特征端到端预测多帧未来占用
- 避免中间表示:绕过BEV投影和离散化过程
- 连续表示:使用连续的空间表示,提升模型表达能力
稀疏占用表示
- 稀疏性设计:只表示有意义的占用区域,提高计算和存储效率
- 动态稀疏化:根据场景动态调整稀疏表示
- 内存效率:相比密集占用表示,显著降低内存需求
轨迹条件机制
- 条件生成:在给定未来轨迹的条件下进行占用预测
- 灵活适应:能够适应不同的轨迹规划需求
- 场景理解增强:通过轨迹条件增强对场景动态的理解
2. 架构创新
Transformer-based设计
- 时空注意力:有效捕捉空间和时间依赖性
- 无需显式几何先验:通过注意力机制学习空间关系
- 可扩展性:易于扩展到更复杂的场景和更长的预测时间
端到端学习
- 联合优化:图像特征提取、轨迹编码和占用预测联合优化
- 梯度传播:端到端的梯度传播,提升训练效率
- 表示学习:自动学习最优的特征表示
3. 实验验证
- 在nuScenes基准测试上实现最先进的性能
- 在1-3秒的占用预测任务上显著优于现有方法
- 在任意未来轨迹条件下表现出稳健的场景动态理解能力
四、实验结论 (Experimental Results)
1. 性能表现
nuScenes基准测试
- 数据集:nuScenes自动驾驶数据集
- 评估指标:占用预测精度、IoU等
- 时间范围:1-3秒的未来占用预测
- 结果:在多个评估指标上达到最先进(SOTA)性能
定量结果
- 预测精度:相比基线方法显著提升
- IoU指标:在多个时间步上保持高IoU值
- 计算效率:通过稀疏表示实现高效推理
2. 主要优势
预测质量
- ✅ 高精度预测:在1-3秒预测范围内保持高精度
- ✅ 多帧一致性:预测的多帧占用在时间上保持一致性
- ✅ 细节保留:相比BEV方法,更好地保留空间细节
轨迹条件能力
- ✅ 灵活适应:能够根据不同的未来轨迹生成相应的占用预测
- ✅ 场景理解:在任意轨迹条件下表现出稳健的场景动态理解
- ✅ 规划支持:为轨迹规划提供准确的占用信息
计算效率
- ✅ 稀疏表示:通过稀疏占用表示提高计算效率
- ✅ 内存优化:相比密集表示,显著降低内存需求
- ✅ 实时性:满足实时应用的需求
3. 消融实验
关键组件验证
- 稀疏表示:验证稀疏表示相比密集表示的优势
- 轨迹条件:验证轨迹条件机制的有效性
- Transformer架构:验证基于注意力的架构优势
设计选择分析
- 不同稀疏度:分析不同稀疏度对性能的影响
- 时间步数:分析预测时间步数对性能的影响
- 轨迹编码方式:分析不同轨迹编码方式的效果
4. 定性分析
可视化结果
- 展示了不同场景下的占用预测结果
- 对比了不同方法在复杂场景中的表现
- 验证了轨迹条件机制在不同轨迹下的适应性
失败案例分析
- 分析了模型在极端场景下的表现
- 识别了需要改进的方向
5. 整体结论
- 方法有效性:SparseWorld-TC在3D占用预测任务上实现了最先进的性能
- 创新价值:通过稀疏占用表示和轨迹条件机制,提供了新的研究思路
- 实用价值:方法具有实际应用价值,能够支持自动驾驶等应用场景
- 未来方向:为进一步研究提供了基础,包括更长的预测时间、更复杂的场景等
论文信息
- 标题:SparseWorld-TC: Trajectory-Conditioned Sparse Occupancy World Model
- arXiv:https://arxiv.org/abs/2511.22039v2
- 作者:Jiayuan Du, Yiming Zhao, Zhenglong Guo, Yong Pan, Wenbo Hou, Zhihui Hao, Kun Zhan, Qijun Chen
- 代码:https://github.com/MrPicklesGG/SparseWorld-TC
关键贡献总结
- 首次提出轨迹条件的稀疏占用世界模型,实现了端到端的多帧未来占用预测
- 绕过BEV投影和离散化,采用稀疏占用表示,提升了模型的表示能力和计算效率
- 基于Transformer的架构,有效捕捉时空依赖性,无需显式几何先验
- 在nuScenes基准测试上达到SOTA性能,验证了方法的有效性