双目视觉标定:消除视差误差的7种核心方案,附OpenCV+Halcon实现代码!
- 🎯双目视觉标定:消除视差误差的7种核心方案,附OpenCV+Halcon实现代码!
- 🎯一、先搞懂:视差误差从哪来?
- 🎯二、7种核心方案:从基础标定到精准优化,按需求选
-
-
- [1. 方案1:张氏棋盘格立体标定(基础标配,解决80%常规误差)](#1. 方案1:张氏棋盘格立体标定(基础标配,解决80%常规误差))
- [2. 方案2:高精度标定板选型(从源头减少系统误差)](#2. 方案2:高精度标定板选型(从源头减少系统误差))
- [3. 方案3:亚像素级角点提取(提升标定点定位精度)](#3. 方案3:亚像素级角点提取(提升标定点定位精度))
- [4. 方案4:极线校正优化(消除非平行极线导致的视差误匹配)](#4. 方案4:极线校正优化(消除非平行极线导致的视差误匹配))
- [5. 方案5:多视场标定融合(适配大视野双目场景)](#5. 方案5:多视场标定融合(适配大视野双目场景))
- [6. 方案6:自标定与在线校准(应对产线环境变化)](#6. 方案6:自标定与在线校准(应对产线环境变化))
- [7. 方案7:深度学习辅助标定(应对复杂畸变场景)](#7. 方案7:深度学习辅助标定(应对复杂畸变场景))
-
- 🎯三、实战代码:OpenCV+Halcon实现双目立体标定
-
- [1. OpenCV实现(张氏棋盘格立体标定+极线校正)](#1. OpenCV实现(张氏棋盘格立体标定+极线校正))
- [2. Halcon实现(双目立体标定+极线校正)](#2. Halcon实现(双目立体标定+极线校正))
- 代码关键说明
- 🎯四、工业落地:4个关键技巧,让标定更稳定
-
-
- [1. 标定环境控制](#1. 标定环境控制)
- [2. 图像采集规范](#2. 图像采集规范)
- [3. 定期重标定](#3. 定期重标定)
- [4. 视差误差检测](#4. 视差误差检测)
-
- 🎯五、避坑指南:3个常见误区
- 🎯六、总结:双目视觉标定的"核心逻辑"
🎯双目视觉标定:消除视差误差的7种核心方案,附OpenCV+Halcon实现代码!
做双目3D视觉检测的工程师,几乎都被"视差误差"折磨过:明明标定过的双目相机,测量出来的零件尺寸偏差忽大忽小;点云重建时出现重影、空洞,新能源电池极片的厚度测量误差超5μm,汽车零部件的三维尺寸检测直接偏离公差范围。
这背后的核心问题,是双目视觉标定不精准------双目相机的内参(焦距、主点、畸变)、外参(相对位置、角度)存在误差,导致左右相机的视差计算偏离真实值,最终反映为3D测量的误差。
双目标定的本质不是"走个流程",而是"消除视差误差的系统工程"。今天就拆解消除双目视差误差的7种核心方案,从基础的棋盘格标定到高级的自标定优化,还附上OpenCV和Halcon的可运行代码,帮你实现微米级的双目3D测量!

🎯一、先搞懂:视差误差从哪来?
双目视觉的视差,是左右相机拍摄同一物体的像素位置差,视差与物体深度成反比。视差误差的来源主要分4类,也是工业标定的核心痛点:
-
相机内参误差:镜头畸变未完全校正,焦距、主点的标定值与真实值偏差;
-
外参误差:左右相机的相对平移、旋转角度标定不准,导致极线不平行;
-
标定板误差:标定板的方格尺寸有加工误差,或标定板表面不平整;
-
操作误差:采集标定图像时,标定板角度单一、覆盖视野不全,或相机曝光不一致。
简单说:视差误差是"硬件参数+标定方法+操作流程"的综合误差,7种方案正是从这三个维度层层优化。
🎯二、7种核心方案:从基础标定到精准优化,按需求选
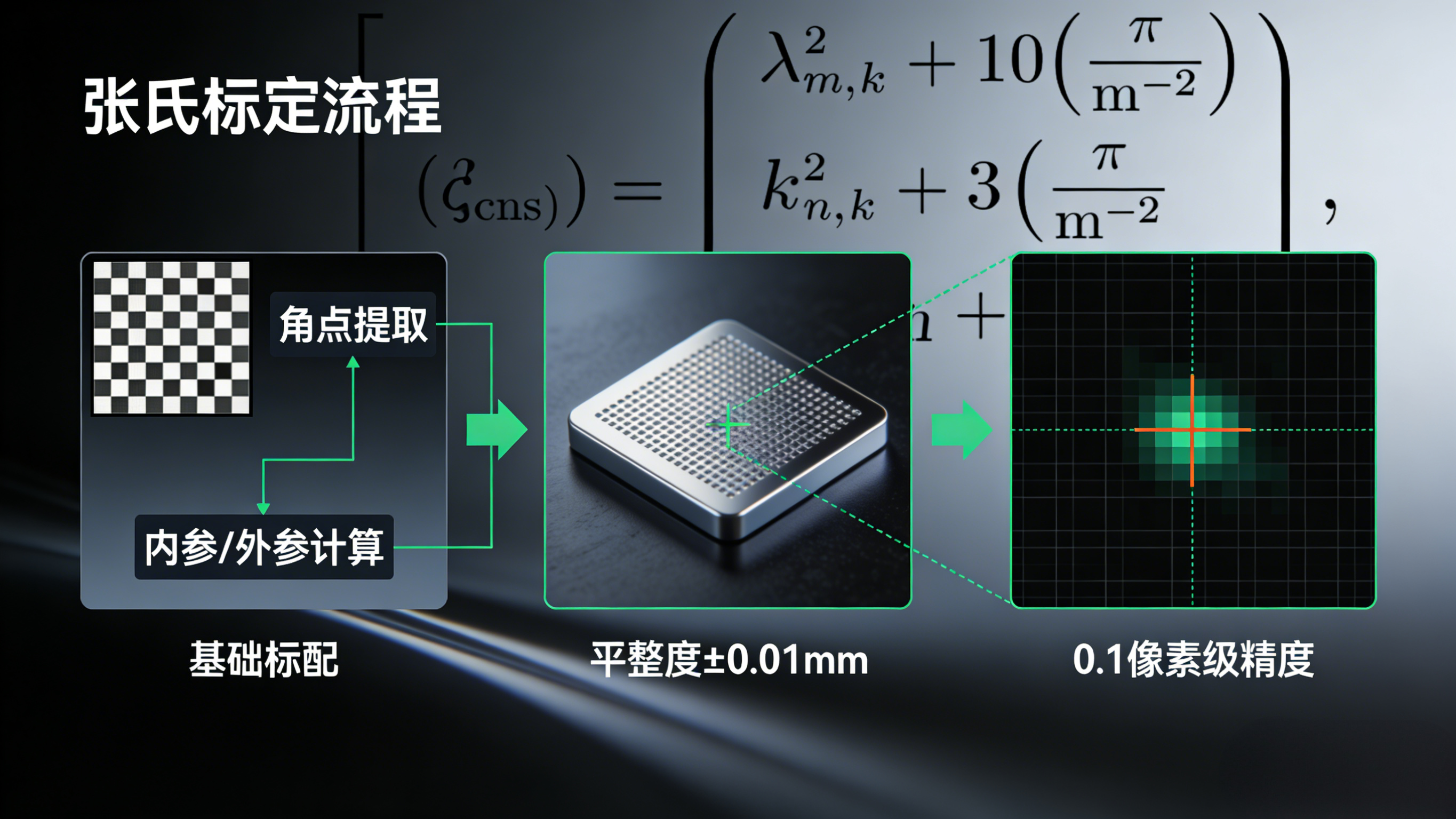
1. 方案1:张氏棋盘格立体标定(基础标配,解决80%常规误差)
-
核心逻辑:用棋盘格标定板,分别标定左右相机的内参和畸变系数,再通过多组重叠的标定图像,计算两相机的相对外参(旋转矩阵R、平移向量T),实现极线校正和视差匹配的基础校准;
-
适用场景:绝大多数工业双目视觉场景(如3C零件3D检测、光伏板尺寸测量);
-
优势:算法成熟、易实现,是双目标定的"入门级标配",能将视差误差控制在1-2像素内;
-
关键操作:采集15-20张不同角度的标定图像,覆盖相机全视野(中心、边缘、倾斜)。
2. 方案2:高精度标定板选型(从源头减少系统误差)
-
核心逻辑:标定板的精度直接决定标定结果,选择高精度、高平整度的标定板,能从源头降低视差误差;
-
选型要点:
-
材质:优先选陶瓷标定板(热膨胀系数低,平整度±0.01mm),替代纸质标定板(易变形);
-
尺寸:标定板占图像视野的30%-50%,方格数量选11×8或13×9(角点越多,标定精度越高);
-
精度:方格尺寸误差<±0.001mm(工业级高精度标定板);
-
-
工业案例:某电池厂用纸质标定板标定时,视差误差3像素,换成陶瓷标定板后,误差降至0.8像素。
3. 方案3:亚像素级角点提取(提升标定点定位精度)
-
核心逻辑:在提取棋盘格角点时,采用亚像素级细化算法(如高斯牛顿法),将角点定位精度从"像素级"提升到"亚像素级"(0.1像素以内);
-
关键价值:角点定位精度每提升0.1像素,视差误差可降低0.2-0.3像素,直接提升3D测量精度;
-
适用场景:高精度双目测量场景(如半导体晶圆检测、航空航天部件测量)。
4. 方案4:极线校正优化(消除非平行极线导致的视差误匹配)
-
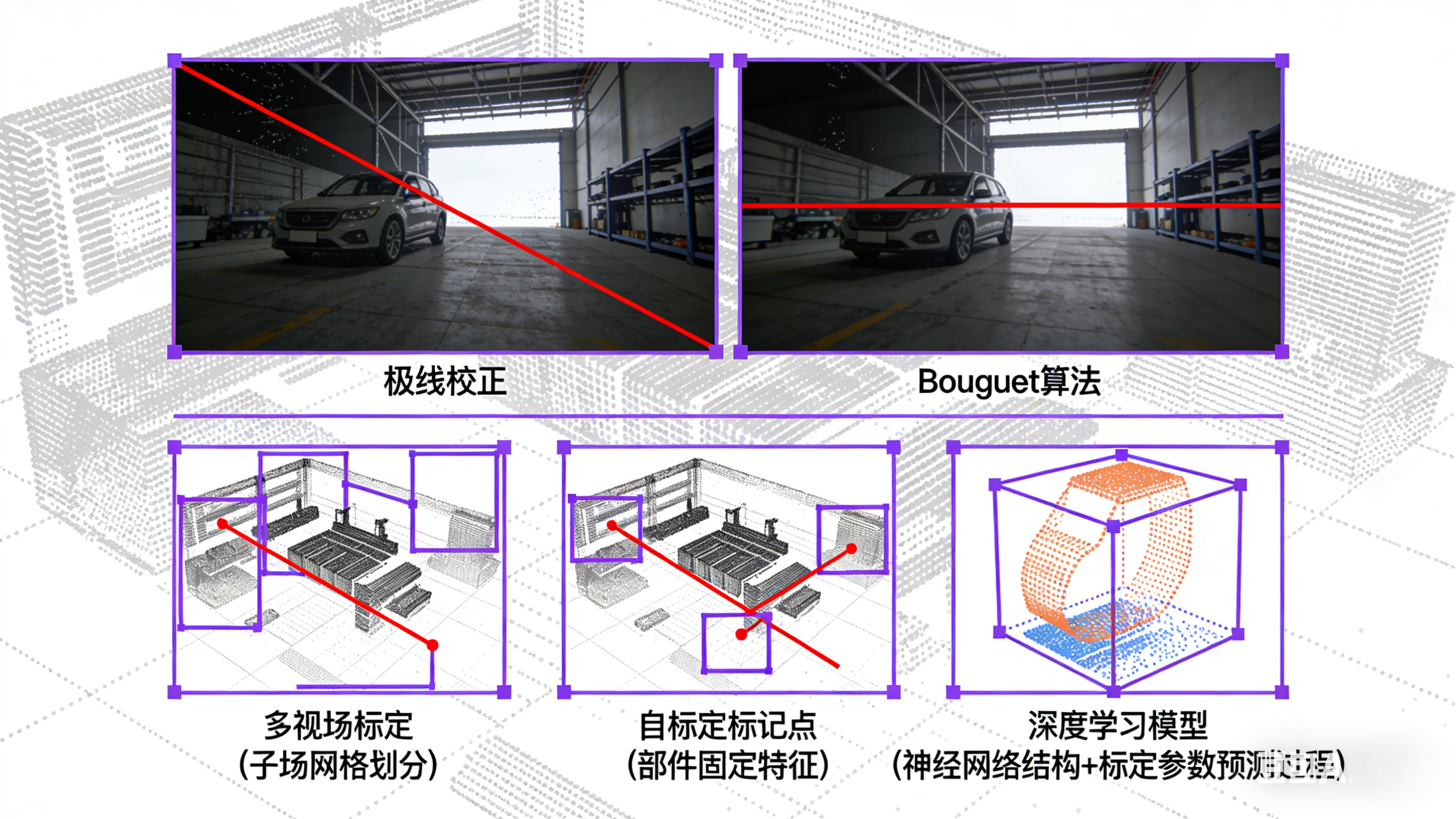
核心逻辑 :通过重投影变换,将左右相机的图像校正为极线平行且水平,让同一物体的像素在左右图像中处于同一行,避免因极线倾斜导致的视差计算错误;
-
优化方法:
-
基础方法:用张氏标定的外参做** Bouguet极线校正**(OpenCV内置);
-
高精度方法:采用Hartley算法,适应相机畸变较大的场景;
-
-
优势:校正后视差匹配的速度提升50%,误匹配率降低80%。
5. 方案5:多视场标定融合(适配大视野双目场景)
-
核心逻辑:对于大视野双目相机(如检测汽车车架的双目系统),单组标定图像难以覆盖全视野,采用多视场标定后融合内参,提升全视野的标定精度;
-
操作步骤:将大视野分为多个子视场,分别标定每个子视场的内参,再通过融合算法得到全局最优的内参和外参;
-
适用场景:大尺寸零件检测的双目场景(如汽车车身、风电叶片检测)。
6. 方案6:自标定与在线校准(应对产线环境变化)
-
核心逻辑:产线的振动、温度变化会导致相机位姿偏移,通过自标定算法实时校准参数,消除环境带来的视差误差;
-
实现方式:
-
在线校准:在产线中设置标定标记点(如零件上的固定特征),每次检测前自动采集标记点图像,更新外参;
-
自标定:利用场景中的自然特征(如零件的边缘、角点),无需标定板即可更新相机参数;
-
-
适用场景:振动大、温度变化剧烈的产线(如冲压车间、焊接车间)。
7. 方案7:深度学习辅助标定(应对复杂畸变场景)
-
核心逻辑 :用大量"标定板图像-真实参数"的配对样本训练深度学习模型,让模型直接学习图像特征与相机参数的映射关系,校正传统标定法难以处理的非线性复杂畸变;
-
优势:能处理镜头磨损、安装偏差导致的不规则畸变,将视差误差控制在0.5像素以内;
-
落地注意:需要GPU加速,适合高要求、大批量的工业场景(如新能源电池模组的在线3D检测)。
🎯三、实战代码:OpenCV+Halcon实现双目立体标定
1. OpenCV实现(张氏棋盘格立体标定+极线校正)
python
import cv2
import numpy as np
import os
def stereo_calibrate(images_left_path, images_right_path, board_size=(9,6),
square_size=25):
"""
双⽬⽴体标定:计算内参、外参和视差映射矩阵
:param images_left_path: 左相机标定图像路径
:param images_right_path: 右相机标定图像路径
:param board_size: 棋盘格内⻆点数量
:param square_size: 棋盘格⽅块尺⼨(mm)
:return: 校正映射矩阵、重投影矩阵
"""
# 准备标定板世界坐标
objp = np.zeros((board_size[0]*board_size[1], 3), np.float32)
objp[:, :2] = np.mgrid[0:board_size[0], 0:board_size[1]].T.reshape(-1, 2)
objp *= square_size
obj_points = [] # 世界坐标点
img_points_left = [] # 左相机图像坐标点
img_points_right = [] # 右相机图像坐标点
# 读取标定图像
left_images = sorted(os.listdir(images_left_path))
right_images = sorted(os.listdir(images_right_path))
for l_img, r_img in zip(left_images, right_images):
# 读取左图像并提取⻆点
img_l = cv2.imread(os.path.join(images_left_path, l_img))
gray_l = cv2.cvtColor(img_l, cv2.COLOR_BGR2GRAY)
ret_l, corners_l = cv2.findChessboardCorners(gray_l, board_size, None)
# 读取右图像并提取⻆点
img_r = cv2.imread(os.path.join(images_right_path, r_img))
gray_r = cv2.cvtColor(img_r, cv2.COLOR_BGR2GRAY)
ret_r, corners_r = cv2.findChessboardCorners(gray_r, board_size, None)
if ret_l and ret_r:
# 亚像素级⻆点细化(⽅案3:提升定位精度)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER,
30, 0.001)
corners_l_sub = cv2.cornerSubPix(gray_l, corners_l, (11,11),
(-1,-1), criteria)
corners_r_sub = cv2.cornerSubPix(gray_r, corners_r, (11,11),
(-1,-1), criteria)
obj_points.append(objp)
img_points_left.append(corners_l_sub)
img_points_right.append(corners_r_sub)
# 单⽬标定(左相机)
ret_l, mtx_l, dist_l, rvecs_l, tvecs_l = cv2.calibrateCamera(obj_points,
img_points_left, gray_l.shape[::-1], None, None)
# 单⽬标定(右相机)
ret_r, mtx_r, dist_r, rvecs_r, tvecs_r = cv2.calibrateCamera(obj_points,
img_points_right, gray_r.shape[::-1], None, None)
# ⽴体标定
flags = cv2.CALIB_FIX_INTRINSIC
criteria_stereo = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30,
0.001)
ret_stereo, mtx_l, dist_l, mtx_r, dist_r, R, T, E, F = cv2.stereoCalibrate(
obj_points, img_points_left, img_points_right, mtx_l, dist_l, mtx_r,
dist_r,
gray_l.shape[::-1], criteria=criteria_stereo, flags=flags
)
# 极线校正(⽅案4:Bouguet算法)
R_l, R_r, P_l, P_r, Q, roi_l, roi_r = cv2.stereoRectify(
mtx_l, dist_l, mtx_r, dist_r, gray_l.shape[::-1], R, T, alpha=1
)
# 计算校正映射矩阵
map_l_x, map_l_y = cv2.initUndistortRectifyMap(mtx_l, dist_l, R_l, P_l,
gray_l.shape[::-1], cv2.CV_32FC1)
map_r_x, map_r_y = cv2.initUndistortRectifyMap(mtx_r, dist_r, R_r, P_r,
gray_r.shape[::-1], cv2.CV_32FC1)
return map_l_x, map_l_y, map_r_x, map_r_y, Q
def stereo_undistort(img_l_path, img_r_path, map_l_x, map_l_y, map_r_x,
map_r_y):
"""
双⽬图像极线校正
"""
img_l = cv2.imread(img_l_path)
img_r = cv2.imread(img_r_path)2. Halcon实现(双目立体标定+极线校正)
csharp
* 双⽬⽴体标定与极线校正(⼯业级实现)
dev_close_window()
dev_open_window(0, 0, 1200, 600, 'black', WindowHandle)
* 1. 参数设置
BoardSize = [9,6] // 棋盘格内⻆点数量
SquareSize = 25 // 棋盘格⽅块尺⼨(mm)
CalibLeftPath = 'calib_left/' // 左相机标定图像路径
CalibRightPath = 'calib_right/' // 右相机标定图像路径
* 2. 读取标定图像并提取⻆点
gen_empty_obj(CalibImagesLeft)
gen_empty_obj(CalibImagesRight)
gen_empty_obj(ChessboardPointsLeft)
gen_empty_obj(ChessboardPointsRight)
for Index := 1 to 20 by 1 // 20张标定图像
* 读取左相机图像
read_image(ImgLeft, CalibLeftPath + Index$'.jpg')
concat_obj(CalibImagesLeft, ImgLeft, CalibImagesLeft)
* 提取左相机⻆点
find_chessboard_points(ImgLeft, ChessboardPointsLeft, BoardSize, 'ratio',
0.7, 'negate', 'true')
* 读取右相机图像
read_image(ImgRight, CalibRightPath + Index$'.jpg')
concat_obj(CalibImagesRight, ImgRight, CalibImagesRight)
* 提取右相机⻆点
find_chessboard_points(ImgRight, ChessboardPointsRight, BoardSize,
'ratio', 0.7, 'negate', 'true')
endfor
* 3. 双⽬⽴体标定
calibrate_stereo_cameras(CalibImagesLeft, CalibImagesRight,
ChessboardPointsLeft, ChessboardPointsRight,
BoardSize, SquareSize, 'area_scan_telecentric', [],
[], CameraParamLeft, CameraParamRight,
RelPose, 'all', Error)
* 4. 极线校正
gen_binocular_rectification_map(MapLeft, MapRight, CameraParamLeft,
CameraParamRight, RelPose, 'bouguet', 1)
* 5. 读取测试图像并校正
read_image(ImgTestLeft, 'test_left.jpg')
read_image(ImgTestRight, 'test_right.jpg')
map_image(ImgTestLeft, MapLeft, ImgRectLeft)
map_image(ImgTestRight, MapRight, ImgRectRight)
* 6. 显⽰结果
dev_display(ImgRectLeft)
dev_set_window_pos(WindowHandle, 0, 640)
dev_display(ImgRectRight)
disp_message(WindowHandle, '左相机校正后', 'window', 10, 10, 'black', 'true')
disp_message(WindowHandle, '右相机校正后', 'window', 10, 10, 'black', 'true')代码关键说明
-
OpenCV版 :完整实现"亚像素角点提取→立体标定→极线校正"流程,
stereoRectify函数内置Bouguet算法,适合研发阶段快速验证; -
Halcon版 :调用工业级的
calibrate_stereo_cameras函数,简化了标定流程,gen_binocular_rectification_map支持多种极线校正算法,适配产线稳定运行; -
参数调整 :
alpha=1保留校正后的全部图像区域(含黑边),alpha=0裁剪黑边,可根据场景选择。
🎯四、工业落地:4个关键技巧,让标定更稳定
1. 标定环境控制
-
标定在恒温车间(20±2℃)进行,避免温度变化导致相机参数漂移;
-
关闭车间风扇、振动设备,防止标定板晃动导致角点提取错误。
2. 图像采集规范
-
标定图像的光照均匀,避免标定板反光(可用柔光箱打光);
-
每张标定图像的标定板角度差异≥15°,避免角度单一导致外参计算不准。
3. 定期重标定
-
产线稳定环境:每月重标定1次;
-
振动大的环境:每周重标定1次;
-
更换镜头/相机后:必须重新标定。
4. 视差误差检测
-
用标准件(如已知尺寸的陶瓷块)检测标定后的视差误差,若误差>1像素,重新标定;
-
检测时关注边缘区域的视差误差(大视野场景边缘误差易偏大)。
🎯五、避坑指南:3个常见误区
-
误区1:"标定一次终身受用"------产线环境的微小变化都会导致参数偏移,定期重标定是必要的;
-
误区2:"角点越多越好"------角点数量过多会增加计算量,15-20张图像、每张图像80-100个角点足够;
-
误区3:"只靠算法优化,忽视硬件"------镜头畸变过大、相机安装松动,再优秀的标定算法也难消除视差误差。
🎯六、总结:双目视觉标定的"核心逻辑"
消除视差误差的核心是**"硬件精准+方法科学+操作规范"**:先通过高精度标定板和规范操作获取可靠的标定数据,再通过算法优化提升参数精度,最后通过在线校准应对环境变化。
7种方案从基础到高级,按需选择即可:常规场景用张氏标定+亚像素角点提取,高精度场景用陶瓷标定板+多视场融合,复杂环境用自标定+深度学习辅助。