代码实现了一个多无人机协同攻击的模拟系统,适用于分析和优化无人机群在时间同步和角度约束下的攻击任务。通过贝塞尔曲线进行路径规划,并通过动态仿真展示了无人机群的协同飞行过程,提供了对无人机群体协同任务的可视化和评估。
文章目录
代码简介
这段MATLAB代码实现了一个基于时间同步和角度约束的无人机群协同攻击算法。以下是详细的功能介绍:
代码功能
-
无人机初始化与参数设置:
- 设定了无人机的数量、目标位置以及每架无人机的初始位置。每架无人机的初始位置是随机生成的。
- 为每架无人机指定一个攻击角度,这些角度均匀分布在目标周围。
-
计算攻击进入点:
- 根据指定的攻击角度,计算每架无人机的进入点。攻击进入点是从目标出发,沿攻击角度方向一定距离计算的点。
-
路径规划:
- 使用贝塞尔曲线进行路径规划,确保每架无人机从起始点飞行到攻击进入点,并最终到达目标位置。每条路径由多个控制点构成,以确保飞行轨迹平滑且适应无人机的转弯能力。
- 代码生成每架无人机的飞行轨迹,并计算路径长度。
-
速度调整与时间同步:
- 根据每架无人机的路径长度和最大速度,计算出每架无人机需要的飞行时间。
- 所有无人机的飞行时间被同步,确保它们同时到达目标。根据飞行时间调整每架无人机的速度,并确保其速度在允许的范围内。
-
动态仿真:
- 使用动画方式动态展示无人机的飞行过程。仿真中,时间以步长进行更新,每架无人机的位置随着时间变化而更新,直到所有无人机到达目标。
- 仿真展示了每架无人机的飞行轨迹、当前位置以及与目标的距离变化。
-
结果输出与可视化:
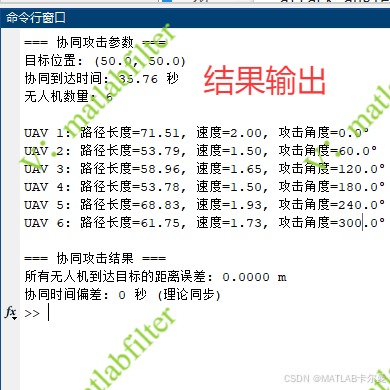
- 输出每架无人机的路径长度、速度和攻击角度。
- 最终仿真结果展示了每架无人机到达目标的距离误差和协同攻击的时间偏差。
- 通过图形界面展示无人机的飞行轨迹、攻击进入点、目标位置以及各无人机的距离变化。
结果与分析
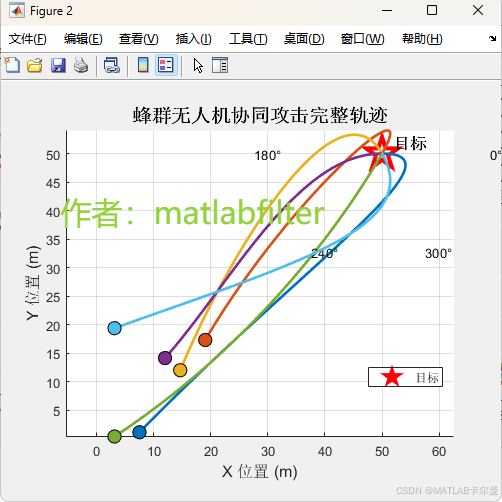
- 通过动态仿真,能够直观地观察到每架无人机的飞行轨迹以及它们与目标之间的距离随时间变化的情况。
- 代码通过实时更新无人机的位置和轨迹,模拟了一个多无人机在时间和角度约束下协同攻击的过程。
运行结果
轨迹:
距离曲线:
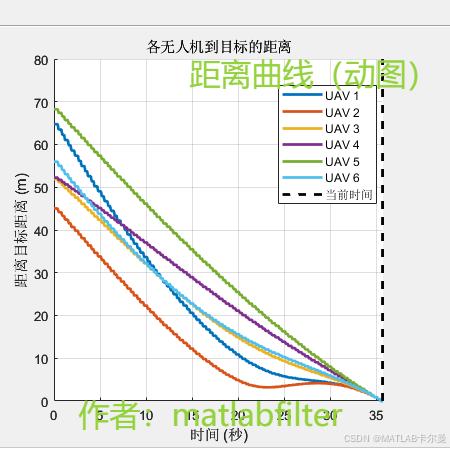
实际为动图:
【MATLAB代码】多无人机,集群多角度打击目标,时间与角度
命令行截图:
MATLAB源代码
代码功能
- 通过贝塞尔曲线规划无人机的攻击轨迹,并且在目标周围确保每架无人机按照指定的攻击角度进攻。
- 无人机之间通过时间同步和速度调整实现协同攻击,确保所有无人机在相同时间到达目标。
- 通过动态仿真展示无人机从起始位置到目标的飞行过程,并实时更新每架无人机的路径和距离目标的变化。
结果介绍
- 输出每架无人机的路径长度、速度和攻击角度。
- 动态仿真展示了所有无人机的运动轨迹,并且实时更新无人机与目标之间的距离变化。
- 最终结果包括所有无人机到达目标的距离误差和协同攻击的时间偏差。
代码下载链接:https://github.com/evandworld/free_multiAttack
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者