Drone-DIC
本视频展示了使用Drone-DIC系统测量预应力混凝土轨枕承受四点弯曲载荷从加载直至破坏的整体过程。
以下是论文正文:
摘要
背景:数字图像相关法(DIC)广泛应用于基础设施的远程无损结构健康评估。当前DIC应用仅限于结构的小范围区域,且需使用固定式立体视觉相机系统,这些系统在偏远地区不易转移与部署。
目标:本文阐述了搭载机载立体视觉系统的无人机(Unmanned Aircraft System:UAS)的开发与验证过程。该系统可采集、存储并传输图像数据进行分析,从而获取全场三维位移与应变测量结果。
方法:研究团队成功研发并测试了配备有立体DIC(Stereo-DIC)系统的无人机平台。该系统(命名为Drone-DIC)可自主悬停于受压预应力轨枕前方采集DIC数据,同时采用固定式DIC系统同步采集该轨枕数据,用于与Drone-DIC系统结果进行对比验证。
结果:本文展示了对两套系统所获结果的分析,研究表明,Drone-DIC系统获得的结果与固定式DIC系统采集的数据高度一致。
结论:本研究成功验证了将DIC技术与无人机技术集成于Drone-DIC系统的可行性。Drone-DIC融合了传统固定式DIC系统的高精度检测能力与无人机平台的机动性优势,为难以通过常规方法进入的结构部位实现自主DIC检测迈出了重要一步。
关键词:数字图像相关 · 无人机 · 远程结构健康监测 · Drone-DIC

引言
为确保桥梁、公共建筑和铁路等基础设施的安全运行,对其构件进行系统性检测至关重要。目前主要采用由专业检测人员执行的目视检查作为评估手段。这种检测方式不仅耗时长、成本高昂,还存在安全隐患,且常因检测过程的重复性和主观性导致结果不稳定1。
近年来,数码相机和计算机视觉技术的发展,推动了基于视觉的结构健康监测(SHM)技术的进步。此类方法具有无损、非接触的特点,所需硬件设备少且安装简便,因此提供了相对低成本且侵入性极小的替代方案。点跟踪2、运动恢复结构(SfM)3以及基于相位的视频运动处理4,都是已广泛应用的一些方法。在过去二十年间,立体数字图像相关(Stereo-DIC,以下简称立体DIC)5已成为实验力学领域全球首选的高分辨率、高精度变形测量方法,其应用范围涵盖从微观尺度材料研究,到承受复杂载荷条件的飞机结构检测等领域6-8。典型的立体DIC应用聚焦于结构中相对较小的区域,此时采用固定式立体视觉相机系统即可满足高分辨率、全场测量的需求。
另一个快速发展的领域是无人航空系统(Unmanned Aircraft Systems, UAS),通常被称为"无人机"。无人机,尤其是垂直起降(VTOL)微型飞行器(Micro Aerial Vehicles, MAV),是开展远程检测的理想平台。由于其体积小且具备悬停能力,它们能够轻松部署到传统方法难以到达的区域进行数据采集,同时对结构的正常运行干扰极小9。这类系统还为大型结构(如桥梁、油气储罐)的结构健康评估提供了创新平台,包括位于偏远地区的设施。为实现高效检测,移动式无人机平台需具备强大的成像能力,并支持远程操作,尽可能减少现场人工干预。在大多数情况下,部署的系统用于获取结构中感兴趣区域(Areas Of Interest)的高分辨率图像。在某些系统中,借助专用软件,检测过程可实现自动化,从而识别诸如裂纹或腐蚀等静态缺陷,有效降低传统目视检测所带来的成本和风险10,11。而在另一些场景下,系统会采集一系列相互重叠的图像,并利用图像拼接技术和SfM算法,构建出结构的详细地图或三维重建模型12。不过,多数情况下,无人机在部署及数据采集过程中的控制仍需人工操作,需要一名操作员手动遥控无人机完成任务。
本研究通过Drone-DIC(一种基于无人机的立体数字图像相关系统)的开发及实验室验证,成功实现了DIC技术与无人机技术的集成。该系统旨在充分利用无人机系统的自主能力,突破传统三脚架式DIC系统的局限性,为传统手段难以触及的结构部位提供自主检测解决方案。
关于无人机与DIC技术结合的早期研究,Reagan等人13首次提出使用搭载定制相机系统的无人机监测桥梁裂缝的扩展情况。尽管作者们开发了这套无人机系统,但部分测量数据是在成像系统手持固定而非无人机飞行状态下获取的。作者观察到,在GPS信号受限的环境中,视觉系统的假装加剧了飞行不稳定性,使得操作难度对专业操作员而言都颇具挑战。
为提升系统稳定性和载荷能力,Catt等人14采用了一种载荷能力更大的八旋翼无人机。由此,他们的平台能够悬停于目标前方并获取所需数据。为简化系统并实现单人操作,研究者增配了激光雷达与微控制器,当无人机到达目标预设距离时自动触发相机拍摄。实验设置中,利用一把标尺来使一个简单的目标发生变形,以此验证DIC测量结果与独立测量指标的一致性。
从这些初步研究可以看出,此类系统的挑战之一在于平台控制。在我们先前的工作15中,作者介绍了我们的Drone-DIC系统,并证明该系统能够在数据采集过程中实现自主飞行。通过开发基于视觉的位置估算框架及高级位置控制器,该无人机系统无需配备激光雷达或更大功率平台,即可将立体DIC系统稳定维持在目标位置。由此,Drone-DIC系统实现了更高自主性,即使在GPS信号受限环境下仍能保持稳定的自主飞行。
本研究在文献15提出的Drone-DIC开发工作的基础上进一步扩展,重点在于在实验室环境下对机载立体DIC系统的实验验证。首先,我们介绍了搭载立体DIC系统的无人机开发过程,详细阐述了组件选型与材料选用方案,同时概述了系统的自主运行能力,并列举了为提升Drone-DIC测量精度与一致性而实施的原始设计改进措施。其次,作者在全尺寸预应力钢筋混凝土梁上开展系列控制实验,采用多种测量方法验证改进后的Drone-DIC系统所获数据。第三,通过不同测量方法的数据对比,清晰证明无人机Drone-DIC数据的准确性。最后,对实验结果进行深入讨论并规划后续研究方向。

图1 本研究中使用的Drone-DIC系统,标注了所有子系统和传感器
无人机系统
本研究中采用的基于UAS的Drone-DIC平台,是文献15中平台的改进版本,其搭载的四旋翼无人机为图1所示的大疆Matrice 100。这是一款微型无人飞行器,重约3.3kg,根据机载电池的容量不同,续航时间可达15至20分钟。在本应用中选择该无人机的主要原因在于它被设计为一个开发平台,既能集成多种子系统,又可为外接设备提供安装接口。虽然系统核心架构与文献15中的保持一致,但为了提升飞行时长和稳定性已进行多项优化。由于本研究重点在于机载立体DIC子系统的实验验证,因此在此仅简要介绍其核心内容。鉴于本研究重点在于机载立体DIC子系统的实验验证,此处仅简要介绍核心平台配置与控制方案,读者可参阅15获取自主系统的详细信息。
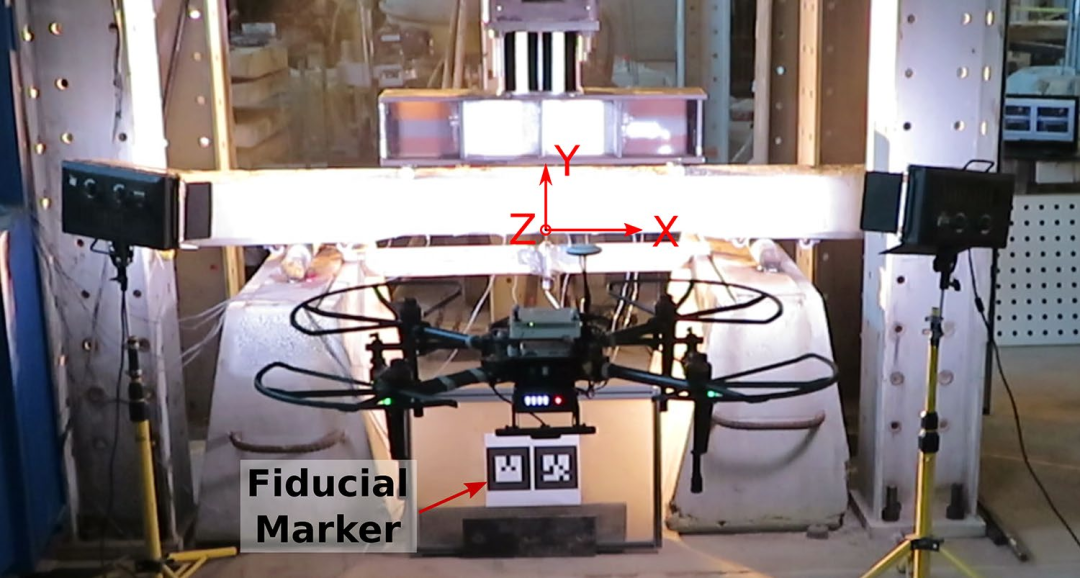
图2 Drone-DIC系统在数据采集过程中的示意图。
图中展示了试样固定参考框架以及用于无人机位置测量的基准标记点
自主性
由于本研究的目标之一是使系统实现自主运行,因此采用在图像中清晰可见的标记来识别目标区域。如图2所示,这里选择了基准标记,这些标记既能为每个感兴趣区域提供专属标识,又能用于无人机系统的位置测量。通过追踪这些标记,无人机系统能够在数据采集过程中精确估算自身位置。基于图像的定位功能显著提升了系统的自主性,使其即使在GPS信号减弱、完全无法使用GPS或处于磁干扰较强的地区,也能正常运行。为检测标记点并定位目标区域,无人机系统配备了万向云台摄像头。为提升定位框架精度,Drone-DIC系统集成了搭载立体摄像头与超声波距离传感器的DJI Guidance传感器套件。利用其中一枚向下探测的超声波传感器,无人机可精确测量悬停高度与垂直速度。最终,定位系统经改造整合了扩展卡尔曼滤波器(Extended Kalman Filter,EKF)。该滤波器融合多项测量数据:(a)标记点获取的位置与航向测量值;(b)导航传感器测得的悬停高度与速度数据;(c)机载惯性测量单元(Inertial Measurement Unit,IMU)提供的加速度测量值。通过综合处理这组数据,可精确估算无人机相对于目标区域的位置。
一旦检测到目标,上述改进使Drone-DIC能够自主飞行,并将机载立体视觉系统置于所需测量位置。在之前的实现方案15中,采用比例-积分-微分(Proportion Integration Differentiation,PID)控制器来控制飞行平台的位置。本研究采用线性二次型调节器(linear quadratic regulator problem,LQR)作为位置控制器,其初始阶段整合了无人机动力学的简化线性模型以获取系统最优控制输入。LQR方法在此应用中尤为关键,因为立体视觉系统及附加传感器的集成改变了Drone-DIC的飞行动力学特性------特别是相机与传感器偏移位置带来的影响。为解决此问题,通过OptiTrack运动捕捉系统追踪无人机在多次飞行中的响应,采用最小二乘法确定了改进的飞行动力学模型。改正后的动力学模型被整合至LQR中,以实现对Drone-DIC系统持续有效的控制。基于图像的位置估算过程和高级位置控制器均采用C++语言开发,并借助机器人操作系统(ROS)16中间件进行实现,运行于DJI Manifold计算机上。DJI Manifold基于英伟达Tegra K1处理器,可连接N1飞行控制系统、Zenmuse Z3云台相机以及DJI Guidance系统。通过大疆机载SDK,该计算机能获取诸如IMU等传感器数据,并向无人机发送高级控制指令。
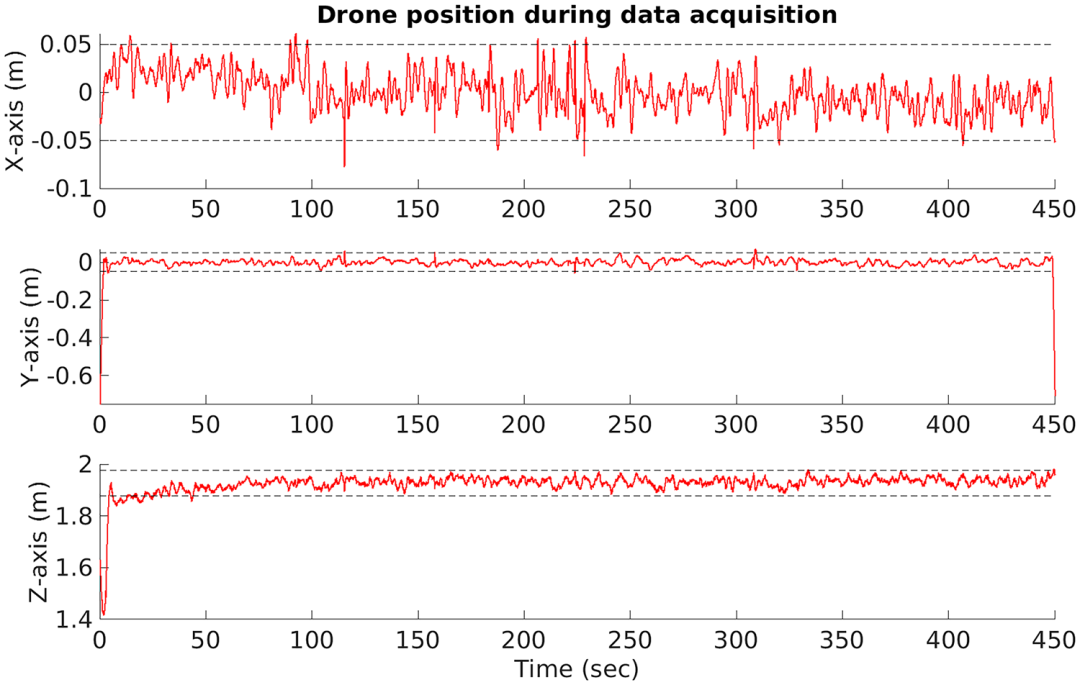
图3 UAS 数据采集过程中基于视觉系统的测量位置
在分析相机硬件规格和实验区域的几何结构后,确定无人机需在距试样1.9m处悬停。在此距离下,DIC相机的视野能够完整覆盖试样,同时允许无人机进行微小位移。图3展示了基于图像定位算法计算得出的无人机相对于试样固定坐标系(如图2所示)的位置。虚线标示出以目标位置为中心、半径5cm的区域,无人机在此范围内移动时,DIC系统仍能保持目标锁定。x轴与y轴方向的位置标准偏差约为2cm,z轴方向约为1.5cm。数据显示,无人机在总飞行时间中超过95%的时间处于目标区域内。
立体DIC系统
在之前的研究15中,立体DIC子系统完全独立于航空电子设备。而在本次迭代中,立体DIC系统改由无人机提供电力支持。由此得以取消额外的电源供应,使有效载荷从770g减至520g,同时延长了无人机的飞行时间。此外,采用英特尔Compute Stick来控制机载成像系统,用户可通过无线连接监控并触发系统,以远程激活VIC-Snap®软件。
由于立体视觉系统安装在移动的无人机平台上,数据采集过程中相机将产生显著运动。此前已有研究探讨了刚体立体视觉系统运动的影响17,18,并已确定了相应,包括VIC-3D®等商用DIC软件。无人机系统运动可能引发的另一问题是运动模糊。文献19研究了运动模糊对DIC测量的影响,虽然发现其对形状测量无显著影响,但作者指出该现象会影响应变测量。运动模糊发生于两种情形:拍摄移动物体时,或由移动相机拍摄静止物体(即本研究场景)。为最大限度减少图像中的运动模糊效应,最有效的方法之一是缩短曝光时间。因此,本研究将曝光时间设定为2毫秒。
缩短曝光时间会降低传感器平面接收的光量,导致图像变暗。为抵消此影响,两组镜头光圈均设为最小值F1.8。此外采用橡胶减震器降低电机和螺旋桨振动对相机的影响。最后,搭载的迷你计算机(Intel Compute Stick)为图像采集与存储提供了轻量化解决方案。不过,这一选择也降低了可用得处理能力,从而限制了相机分辨率和图像采集速率;使用200万像素传感器时,最高采集速率可达5Hz。综上所述,机载立体DIC系统由以下组件构成:
• 配备CCD传感器与全局快门的200万像素Point Gray/FLIR相机
• 12mm焦距、F1.8光圈的Edmund Scientific镜头
• 用于立体相机安装的超高刚性、轻量化碳纤维梁
• 梁体与无人机结构间的橡胶减震支架
• 用于立体视觉系统运行及图像存储的Intel Compute Stick微型计算机
本研究所用的立体DIC系统均来自于研索仪器代理的CSI原厂DIC测量产品:VIC-3D非接触全场应变/应力测量系统。
实验研究
本节通过对比传统仪器与成熟可靠的地面立体DIC系统所获取的测量数据,对提出的Drone-DIC系统进行实验验证。试验采用预应力混凝土轨枕承受四点弯曲载荷从加载直至破坏的测量方案,详细阐述了试验装置、仪器参数设置及加载流程,并重点说明了立体DIC数据采集过程。最终将图像传输至高性能计算机,用于实现:(a) 全场变形与表面应变测量;(b) 损伤检测。

图4 原型和标准连接件的几何形状。最终成品如右下图所示。
混凝土轨枕试件描述
本验证研究中使用的预应力混凝土轨枕,是南卡罗来纳大学针对高速铁路应用开展的系列研究计划的一部分。轨枕总长度为2.591m,具体几何形状如图4所示。预应力通过两排布置的八根7股绞合钢绞线施加,采用ASTM A886标准270级低松弛钢绞线,每根钢绞线直径9.53mm。设计参数与材料详情详见文献20。如图5所示,试件在两个滚轮接触点施加向下垂直力进行四点弯曲试验;轨枕设计承载能力为M=18.31KN·m。

图5 用于混凝土轨枕荷载试验的反应框架。图示为负弯矩的四点试验。
细节A处展示了为试件提供支撑的混凝土块。
试验设置
如图5所示,四点荷载试验在反应框架中进行,该框架由四根4.88m长的W12×87立柱、两根2.135m长的W18×119横梁和两根1.22m长的W16×89横梁组成。此外,一条1.525m长的W18×119横梁连接于主梁并承载作动器。两根分支梁(长度分别为0.2033m和1.0167m)连接于作动器头部,用于将荷载传递至试件。作动器采用489.3kN MTS5型,行程为0.1525m,连接至一台151.4 lpm的 MTS液压泵。该作动器还配备了力传感器及线性可变差动变压器(LVDT),所有试验均在载荷控制模式下进行。
两块梯形截面混凝土块构成试件支撑结构。支撑块长1.22m,高0.7625m,底面宽0.559m,顶面宽0.305m。支撑间距可变以适应不同试验需求。反应框架示意如图5所示。
用于验证测量的仪器配置
为验证无人机数字图像相关技术(Drone-DIC)在全尺寸结构上获取可靠测量数据的能力,特别增设了辅助仪器与Drone-DIC测量结果进行比对。测试期间使用的辅助仪器包括线性可变差动变压器(LVDT)及固定式(地面基准)立体DIC系统。其中LVDT用于测量试件跨中位置的挠度。该LVDT固定于一块2×4英寸木板上,其探针尖端同时接触拉杆中跨点与中宽度位置的表面。探针尖端通过少量环氧树脂粘附于试件。固定式立体DIC系统对试件"背面"进行成像,而无人机搭载的DIC系统则在拉杆"正面"采集测量数据。遵循国际数字图像相关协会制定的最佳实践指南21,表1汇总了固定式立体DIC系统的参数及标定网格数据。
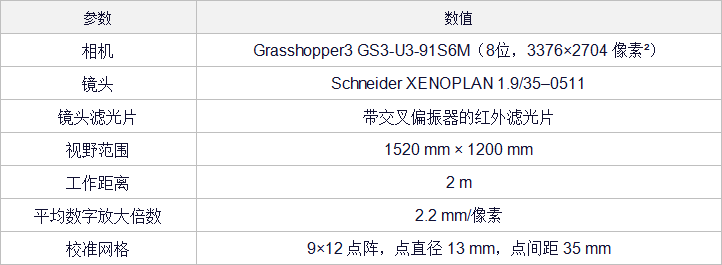
表1 静态立体DIC系统参数规格
此外,系统采用低热辐射照明设备、图像采集计算机及连接线缆,完整组件列表见图6。标定靶标同时用于无人机与地面立体DIC系统的校准。如前所述,图像采集与DIC处理分别采用Correlated Solutions公司VIC-Snap®与VIC-3D®软件。本研究中固定式立体DIC系统的数据采集、图像处理流程、验证及应用研究详情已发表于文献8, 20, 22。

图6 本文所用的固定立体视觉系统及其组件
试样制备
在混凝土轨枕的"正面"和"背面"均施加散斑图案。首先,表面涂覆哑光白色涂料以最大限度减少反射。随后,在包含黑色标记的视野范围内,手工在整个表面施加散斑。散斑施加方式需形成均衡、高对比度且随机的图案。散斑平均直径为6mm。试件无需其他制备步骤。
加载顺序
试件加载过程需同时满足Drone-DIC测量流程及AREMA(American Railway Engineering and Maintenance-of-Way Association:美国铁路工程和道路维护协会)关于铁路轨枕试验的要求:
-
加载速率低于370.7 Ns⁻¹(5 Kips⁻¹)
-
在恒定载荷下采集多幅图像,用于:(a) 对固定系统位移与应变数据进行平均处理以降低测量变异性;(b) 确定Drone-DIC系统获取的测量值变异性。
a) Drone-DIC系统配置为连续图像采集模式
b) 多传感器系统同步操作需手动执行
- 固定系统配置为手动按需采集图像。
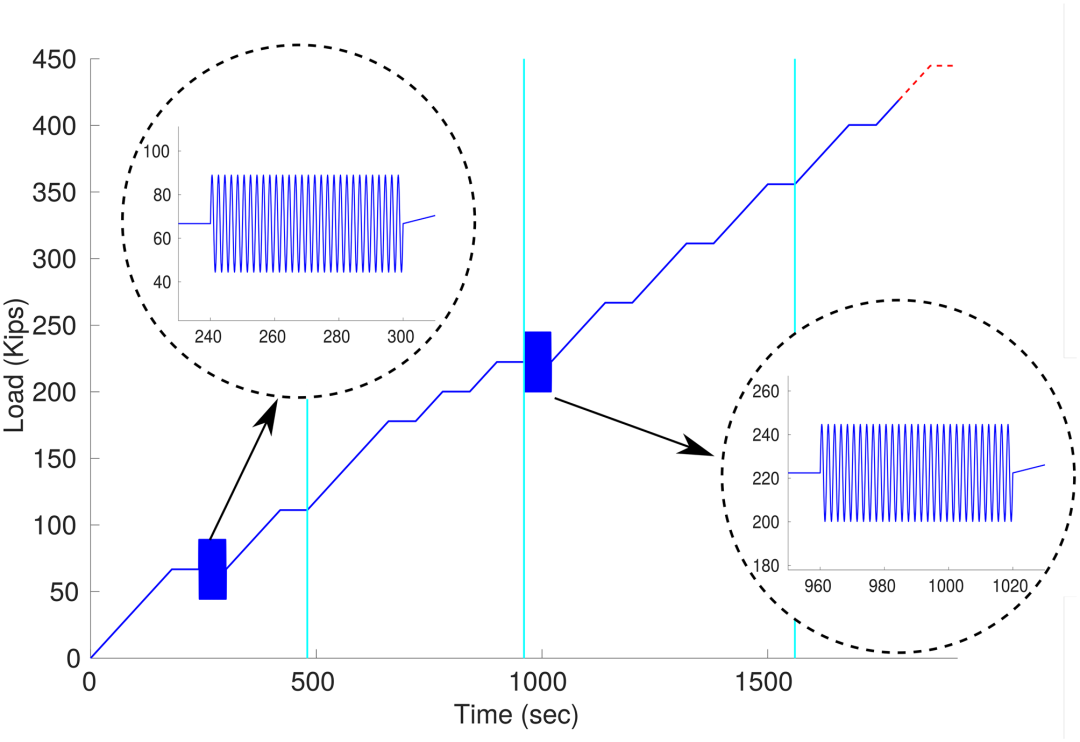
图7 加载序列用于实验验证。细节图显示试件的谐波加载过程,垂直线标示10分钟的载荷保持阶段。加载曲线末段的斜坡-保持段因试件破坏而未完成。
基于上述需求,加载序列定义如图7所示。该序列包含在预定载荷下各保持1分钟的加载过程。每次保持期间,固定式系统在特定载荷下采集多幅图像,同时Drone-DIC系统持续采集图像。由于机载电池最大供电时长为12分钟,加载序列还包含三次各10分钟的载荷保持阶段,用于降落无人机系统、更换电池并立即重新定位无人机以继续测量。加载序列还包含两个1分钟周期、频率0.5Hz、振幅±22.24kN的谐波加载段。首次循环加载在66.72kN负荷下进行,此时未观察到可见损伤。第二次循环加载序列在初始可见损伤出现后于222.41kN负荷下进行。在两次保持期间,Drone-DIC系统持续采集图像,经分析可验证该系统的动态采集能力。
校准数据采集与处理
在采集测量数据前,需对Drone-DIC系统和固定式立体DIC系统进行校准。校准可基于校准目标图像、具有已知比例因子的样本散斑图案图像或混合模式进行。虽然并非强制要求,但本研究中Drone-DIC系统在升空前已完成校准。校准流程包括:在相机与目标(或试样)间不同角度采集图像,随后通过图像处理确定系统几何参数、全局坐标系与相机坐标系间的坐标转换关系,以及相机模型参数5。
对于固定式系统,在施加任何载荷前及每次载荷保持阶段,每台相机均采集50帧图像。零载荷状态下的图像作为相关分析的基准图像。在试样加载过程中,固定系统仅在1分钟的载荷保持阶段采集图像。为降低像素级强度值固有波动造成的噪声,每台相机采集的基准图像与各载荷保持阶段图像均需进行平均处理5。相关处理采用平均基线图像对与各载荷保持阶段的平均图像对,以获取位移与应变数据。图像相关采用45×45像素²的子集区域,步长为11像素。拉格朗日大应变张量的所有分量均通过5×5滤波器尺寸计算。
如前所述,Drone-DIC平台在飞行过程中以每秒5帧(fps)的速率连续采集图像。但由于本研究采用的相机和计算机硬件性能相对较低,实际采集速率并不稳定,在2至5 fps之间波动。由于相机与试样间存在较大相对运动,固定系统中用于降噪的图像平均技术在此不可行,导致选取单帧图像进行相关分析时噪声增大。最终采用31×31像素²的子集尺寸及7像素步长进行图像相关计算。拉格朗日大应变张量的所有分量均采用15×15滤波器尺寸计算,以对局部位移数据进行额外局部平滑处理,从而实现应变估算。
Drone-DIC测量实验验证
本研究中,对Drone-DIC系统的"验证"涉及以下两方面数据质量的比较:(a)由Drone-DIC系统、LVDT及地面固定式立体DIC系统获取的荷载跨中竖向位移数据;(b)Drone-DIC系统与固定式立体DIC系统测得的纵向应变场。
跨中垂直位移
首先,我们更详细地考察Drone-DIC数据。如前所述,由于无人机持续移动,Drone-DIC图像的像素强度数据在载荷保持期间并未进行平均处理。相反,在每次载荷保持过程中,Drone-DIC系统会采集多组试件图像对。垂直位移数据首先通过将特定载荷下的每组图像与基准图像对进行相关性计算获得,随后在每次载荷保持点计算平均值。
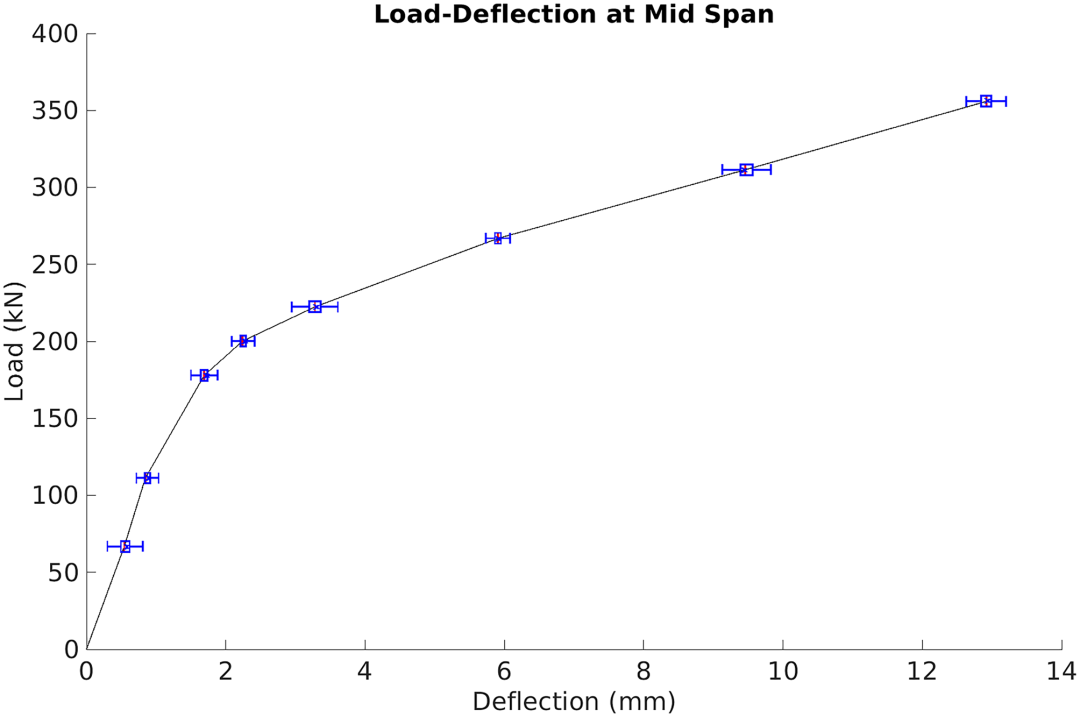
图8 Drone-DIC测量所得的载荷与跨中垂直位移箱线图
图8展示了Drone-DIC测量所得的载荷与跨中垂直位移箱线图,其中显示了每次保持期间位移的均值、中位数及四个四分位数值。测量标准差范围为0.08mm至0.19mm,且在较高载荷下呈现最大值。值得注意的是,Drone-DIC的平均像素放大倍率为0.98pixel/mm。根据文献5,平面变形的基准标准偏差约为0.01像素,因此,对于该系统的平均放大倍率而言,0.01mm的标准偏差可视为近似的噪声下限。经识别导致观测变异性增高的实验因素包括:(1) 因控制系统电子不稳定性导致负载出现±100 N的已知振荡;(2) 高压液压系统组件引发的支撑结构振动。上述因素均非Drone-DIC系统所致,故在固定式立体DIC系统中亦应观测到。
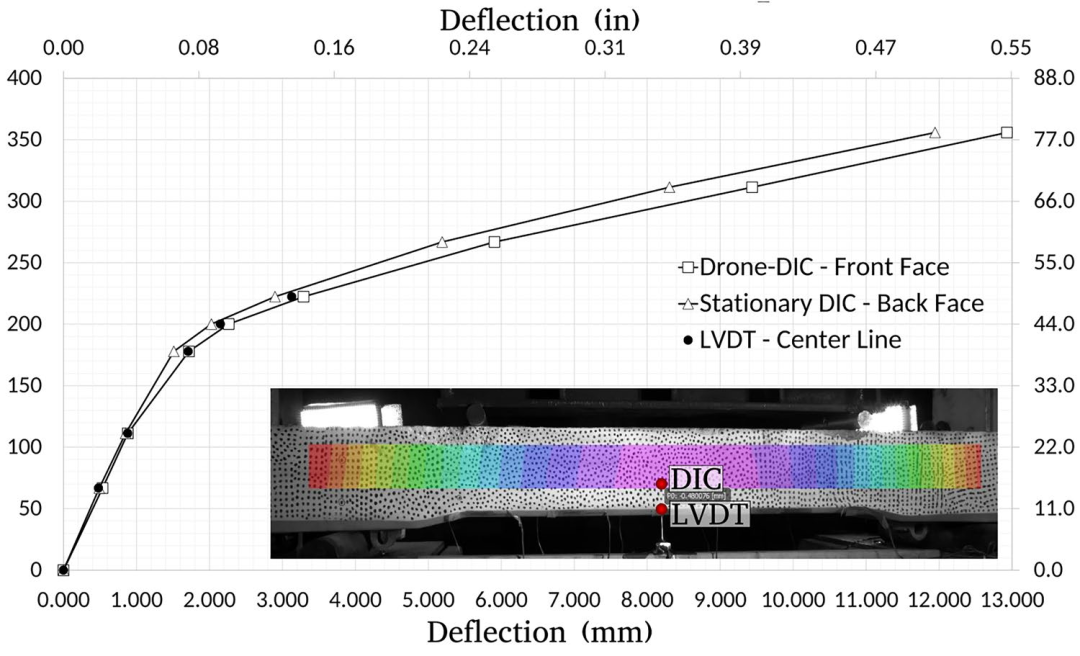
图9 试件跨中位置处来自Drone-DIC、LVDT 和固定式立体DIC系统的载荷-竖向位移数据
基于图8中各载荷水平下的Drone-DIC平均测量值,图9展示了Drone-DIC系统、固定式立体DIC系统与LVDT在载荷-跨中垂直位移测量结果的对比。图9插图同时展示了全场Drone-DIC垂直位移结果,并标注了LVDT位置及其在Drone-DIC测量中的对应点。需说明的是,当载荷达到55千磅时,为防止试件破坏引发仪器意外损坏,LVDT已被移除。
如前所述,地面立体DIC测量数据采集于梁试件背面。通过选取背面对应点(未示出),可从地面立体DIC系统获取的变形图中提取垂直位移数据。观察图9可见,三条曲线在早期阶段(111kN以内)完全一致,而当梁开始出现首次开裂时,各测量结果便出现了分离。尽管从实际应用角度看,这些曲线具有极好的一致性,但在初始损伤之后仍可观察到轻微偏差:LVDT数据介于两套DIC系统的荷载-挠度数据之间。考虑到:(1)试件支座在整个试件宽度上并未实现理想的接触;(2)裂纹的形成与扩展具有非对称性,导致试件刚度偏离均匀值;(3)Drone-DIC系统、 LVDT与固定式立体DIC系统分别位于试件正面、中平面及背面,故该微小偏差可归因于试件相对于梁纵向质心轴发生了一定程度的扭转旋转。
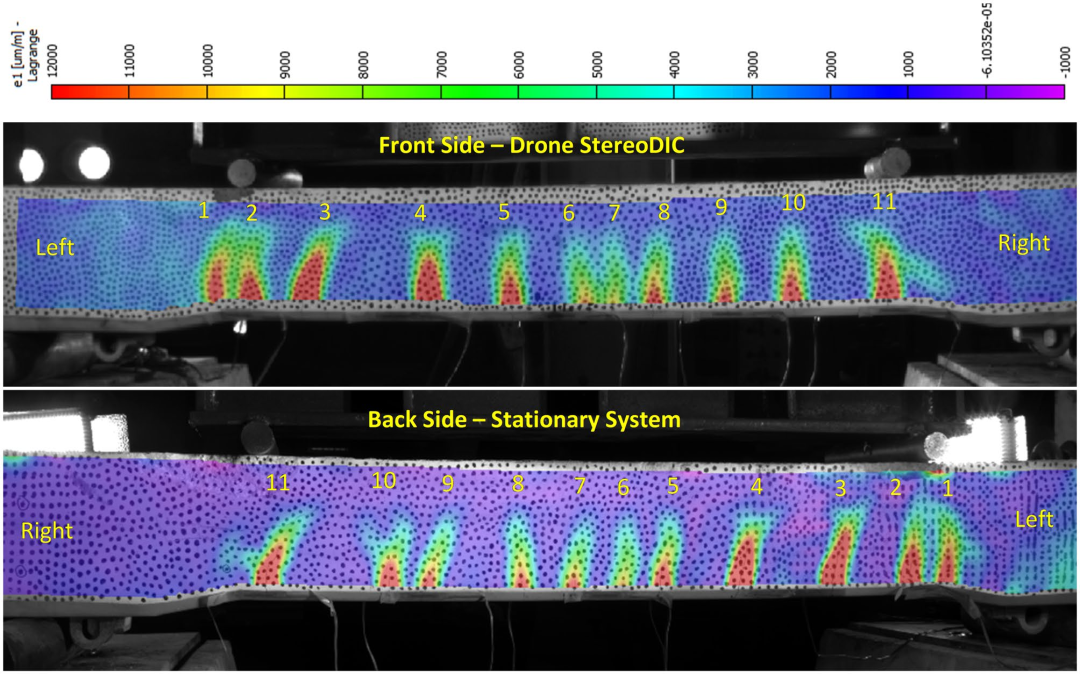
图10 试样正面(Drone-DIC系统)和背面(地面固定式Stereo-DIC系统)测得的纵向应变场εxx
纵向应变场与相关不确定度指标
图10展示了Drone-DIC与地面立体DIC系统在177 kN载荷下的实测纵向应变场。如图所示,两套系统的应变数据具有极佳的一致性。在此载荷下,梁体已开始开裂,导致梁底面形成多个明显的高应变区域。在相关文献中,此类应变测量被称为"伪应变"测量23-25。这些高应变值并非真实应变,而是试件受拉侧损伤区域,经基于子集的相关性分析后所呈现的高应变结果。这一点在图11中也得到了体现:图中以彩色图谱清晰呈现了试件两侧的相关性置信区间指标(σ值)。由于裂纹形成于"伪应变"区域,散斑图案遭到破坏,导致该区域相关性分析的置信度降低。这表明测得的高应变并非真实应变,而是损伤所致。两种系统均识别出11条拉伸裂纹,其位置与长度均通过目视检查得到验证。
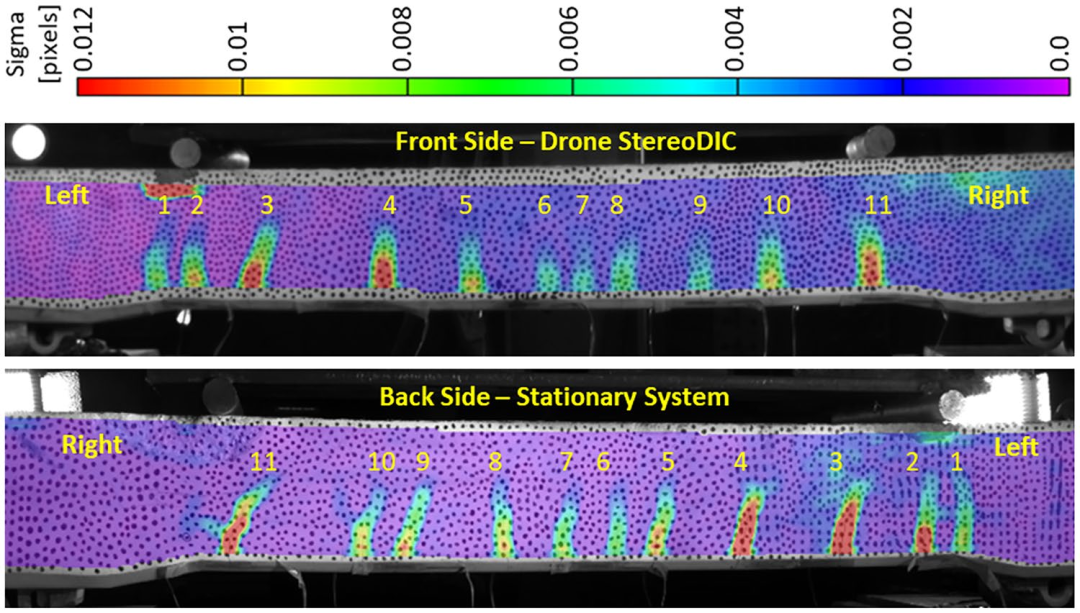
图11 试样前后表面测量置信区间的分布图。梁底部的损伤清晰可见,表现为测量结果的低置信度区间。
跨中垂直位移的时间响应
图12展示了基于LVDT和Drone-DIC测量方法的跨中垂直位移,在单次谐波载荷作用下,随时间变化的曲线。图12中实线对应LVDT每0.1秒记录的位移数据。虚线代表LVDT测量值±1个Drone-DIC标准差(0.13mm),该数据源自66kN均值载荷下的载荷保持状态。Drone-DIC数据以空心圆点标示。结果表明LVDT与Drone-DIC测量值具有较好一致性,Drone-DIC测量值多数情况下与LVDT值的偏差不超过1个标准差。在谐波载荷作用期间,平均误差为0.06mm,均方根偏差为0.08mm。尽管相机采集速率设定为5帧/秒,实际速率并不稳定,偶尔记录到的数据低于1帧/秒。这归因于该初始原型机采用的低端相机及计算机硬件。
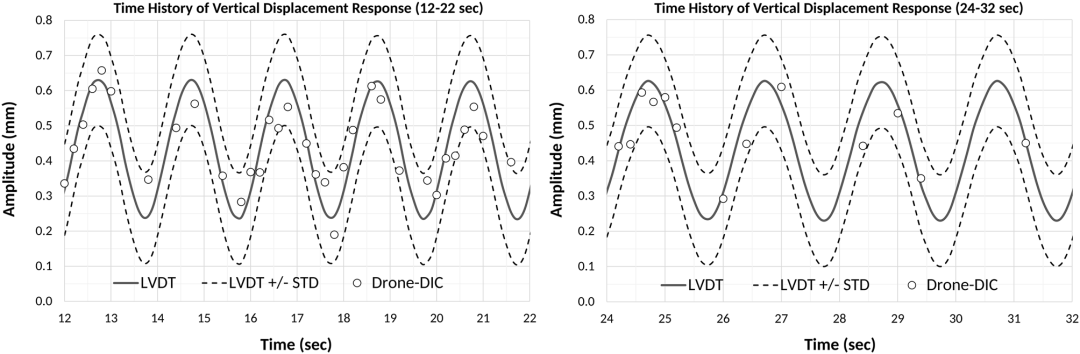
图12 Drone-DIC系统和 LVDT 的垂直位移响应时间曲线
图12左侧曲线展示了图像采集速率接近设定值时的响应状态。图12右侧曲线则反映采集速率下降时的结果。进一步观察发现,当采集速率较低时,测量精度反而略有提升。无论哪种情况,相机在位移测量中的时空分辨率均偏低。显然需采用更高性能的硬件设备才能解决分辨率问题。如图13所示,当对Stereo-DIC数据进行傅里叶变换时,所获主导频率与图13中0.5Hz的载荷频率相吻合。因此,即使存在硬件限制,仍可清晰识别时间趋势。
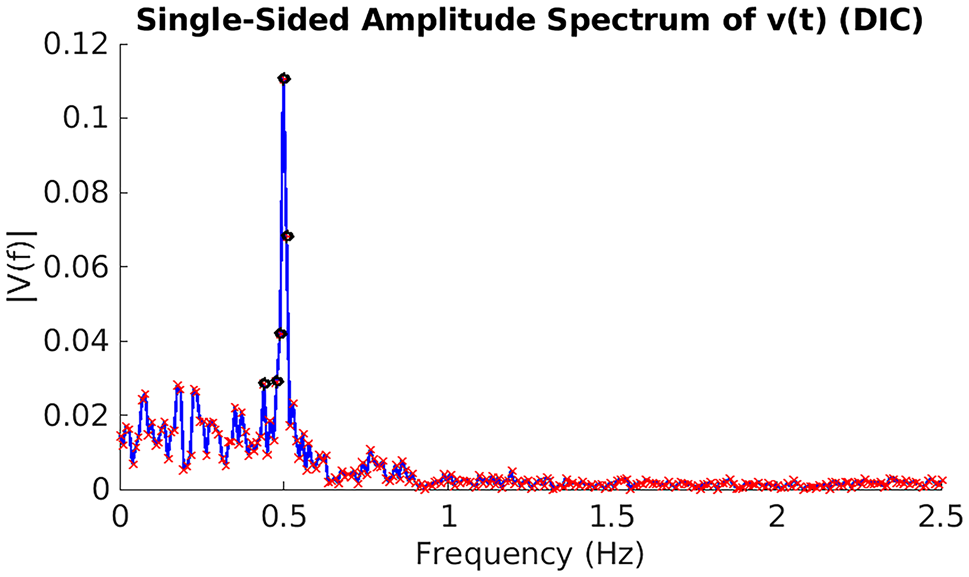
图13 跨中垂直挠度的单侧振幅谱
Drone-DIC测量
为展示Drone-DIC测量系统的多功能性与有效性,本节展示了无人机单次飞行中采集的多种不同类型的测量类型。测量内容包括:(a)梁体底部区域的垂直位移;(b)两种DIC系统获取的应变场对比分析。
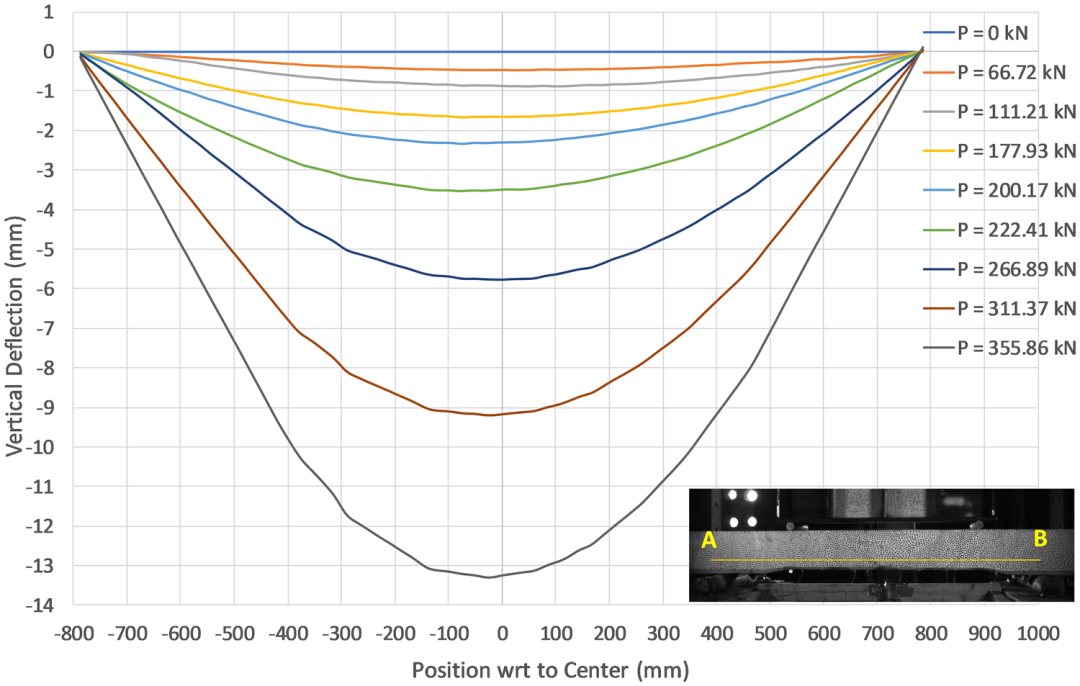
图14 不同载荷下梁中心线的垂直位移
梁中心线位移
图14展示了飞行过程中通过Drone-DIC系统测得的梁底部区域AB线段的垂直挠度(见图中AB线位置标注)。Drone-DIC系统提供了高密度、低噪声的数据集,完整呈现梁体全长度的垂直位移。传统方法需在梁体沿长度方向多点设置LVDT传感器进行实验测量,再通过曲线拟合推算整体位移曲线。最终通过拟合LVDT测量值构建位移曲线。
如图14所示,数据采集于梁体两端支座之间。当载荷小于200kN(初始裂纹形成阶段)时,测量位移在梁体中点处呈对称分布。随着载荷增大及非对称裂纹形成,梁体响应不对称性加剧,最大位移点向中心点左侧偏移。该现象与梁体损伤分布规律一致:首条且最大的裂纹始终出现在左侧(参见图10和图11)。
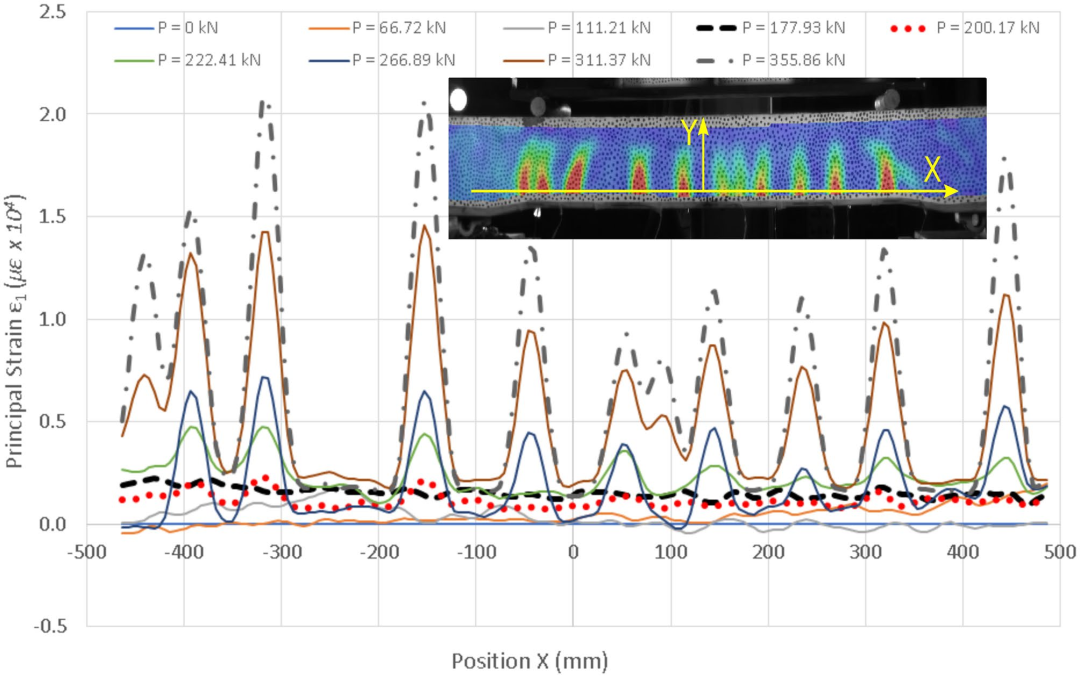
图15 各载荷保持状态下沿纵向轴的主应变分布。插图显示了测量数据提取的基准线。
损伤起始与损伤扩展的检测
利用立体DIC测量结果识别局部损伤的方法有多种。其中两种方法------高局部"伪应变"与局部相关不确定度增加------已在前面重点阐述。另一种方法是监测加载过程中的主应变变化。图15展示了一系列线图,每条曲线代表在不同载荷保持阶段沿AB线(见图中插图)上主应变ε1的变化。当测得的拉伸应变超过混凝土的累积开裂应变值及梁体预应力引起的压缩应变时,首次形成张拉裂缝。该试件底部表面附近首次开裂处的平均测量值为1,300με20。
图15重点展示了两条对应对应178kN和200kN载荷的曲线。第一条曲线相对均匀,其应变值接近试样的典型开裂应变。值得注意的是,所有对应较低载荷的曲线也呈现相对均匀的特征,且对应较低的应变值。然而第二条曲线在试样左段出现高于开裂应变的应变峰值,且与目视检查确认的裂缝位置吻合。高载荷数据在右侧也出现峰值,但振幅显著较小。目视检查发现该区域裂纹刚好延伸至检测线AB。随着载荷增加,现有峰值持续增大,表明既有裂纹正在扩展,同时梁底还形成了新的裂纹。试件长度方向上裂纹的不对称分布,解释了图14所示开裂后位移曲线轻微不对称的现象。
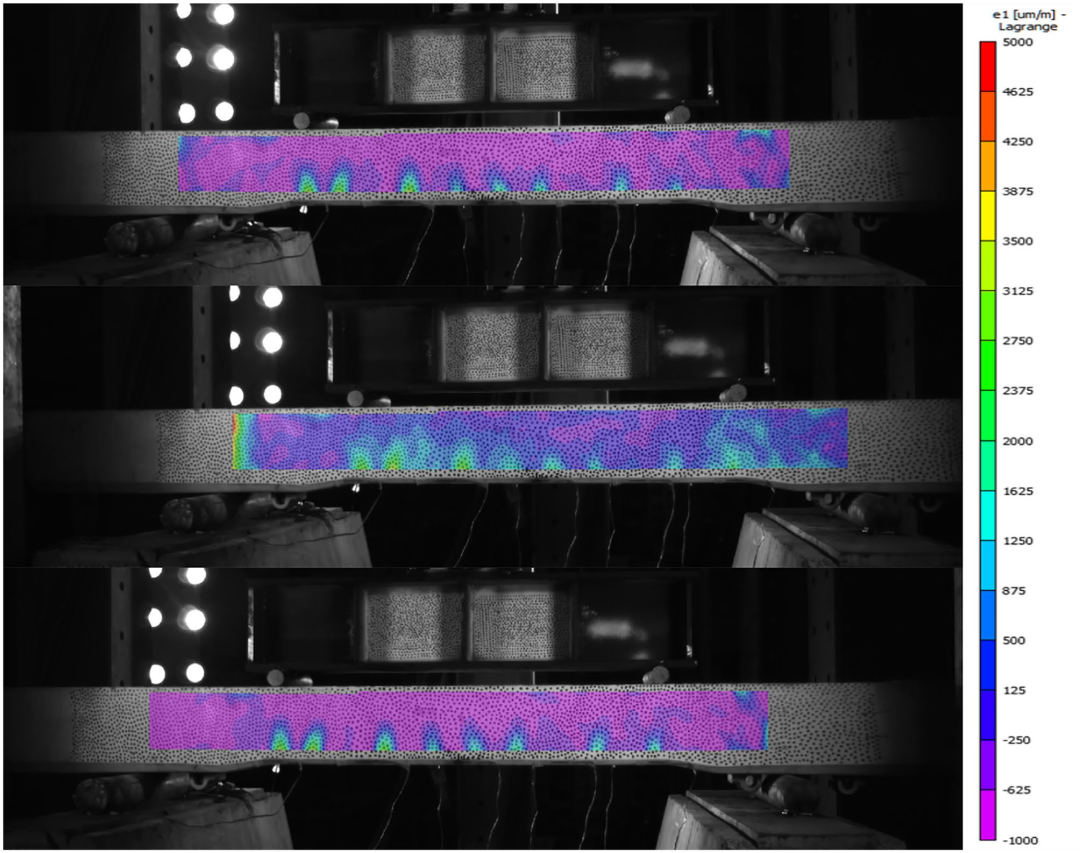
图16三个随机时间点动态加载过程中的主应变场
加载过程中的损伤检测
前文所述的Drone-DIC测量技术适用于在已知且恒定载荷条件下获取数据,充分展现了该移动系统的多功能性。此外,在试样承受动态载荷时捕捉变形场的能力对结构健康评估至关重要,因为这使得在"环境"载荷条件下检测损伤成为可能。本研究中,试样在实验过程中经历两次循环加载。首次谐波加载设计在损伤发生前阶段,旨在对比立体DIC数据与LVDT数据,同时验证系统测量加载时序特性的能力。第二次谐波载荷设计在试件损伤后施加,旨在验证系统能否在动态载荷下检测损伤。图16展示了第二次谐波载荷作用期间三个随机时间点的最大主应变全场数据。尽管三幅图像的应变幅值存在差异,但应变场分布模式完全一致,梁体拉伸侧出现的局部高应变区域是损伤的明显标志。当载荷在±222.4kN范围内振荡时,三幅图像均呈现八条裂纹。该现象与图15所示222.4kN载荷下的应变分布曲线一致。由此可见,即便受限于原型硬件性能,系统仍能在结构循环加载过程中清晰检测到损伤。
结论与未来工作
本研究的核心目标在于验证原型机Drone-DIC系统的有效性,并利用实验结果确定未来工作的改进方向。当前设计的主要局限之一在于有效载荷能力。通过采用小型无人机系统,我们得以在室内安全飞行并完成实验。然而,UAS尺寸缩减与载荷能力降低的限制,制约了立体DIC系统可选用的硬件配置。值得肯定的是,作者团队在载荷受限条件下成功开发出无需人工干预即可维持DIC传感器定位的自主系统,这为未来平台的自主化能力奠定了重要基础。
为使该系统适应户外环境,初步研究明确指出:无人机必须具备更高的功率输出和更长的飞行时间(ToF),以应对风力干扰、测量点距离增加以及大型结构体对更高相机分辨率的要求。提升有效载荷能力和飞行时间参数,将使系统能够搭载更高性能的传感器和计算机,同时满足自主飞行与DIC系统的需求。为确保系统能在不同光照条件下成功检测,镜头需配备可变光圈功能,同时搭载机载照明设备将显著提升检测结果。最后,更强大可靠的平台不仅能在恶劣天气条件下安全部署,还能抵达偏远测量站点。
未来系统另一改进方向是将自主组件与DIC系统整合,从而减少冗余摄像头。此外,立体DIC测量所得的摄像机外参可作为位置估算框架的输入,提升其精度。这亦能优化DIC结果------无人机航电系统提供的附加信息可用于改进刚体运动计算。最后,可将位置估算框架扩展至系统状态中的外力模型。这将使我们能够估算风力干扰,控制器可据此优化数据采集过程中的位置保持性能。
结论
本研究开发并改进了一种配备立体DIC系统的半自主无人机系统(本研究中称为Drone-DIC),在实验室环境下对承受四点弯曲的预应力混凝土梁进行变形测量时,成功验证了该系统的有效性和精确性。测量过程中,Drone-DIC系统能够识别目标区域,随后自主将立体DIC系统对准标记区域并保持稳定,直至数据采集完成。数据采集期间,系统以预设间隔持续捕捉试样图像,同时响应远程触发指令以启动或停止采集流程。
通过与以下测量数据的对比验证了Drone-DIC系统的有效性:(a)试件离散位置的LVDT传感器数据,(b)试件对侧固定式Stereo-DIC系统的测量结果。结果表明,在所有载荷条件下,Drone-DIC系统提供的位移测量值均与LVDT及固定式Stereo-DIC测量结果高度吻合。具体而言,结果证实无人机DIC系统获取的应变数据既能显示试件损伤的起始阶段,也能反映损伤传播过程,且与固定式立体DIC系统独立测得的数据完全一致。最后,在采用谐波加载序列时,尽管原型系统因功耗和重量限制存在硬件局限,我们仍能测量试件响应并识别加载序列的频率。
References
-
Moore M, Phares B, Graybeal B, Rolander D, Washer G (2001)Reliability of Visual Inspection for Highway Bridges
-
Tomasi C, Kanade T (1991)Detection and Tracking of Point Features
-
Ullman S (1979) The interpretation of structure from motion. ProcR Soc London Ser B Biol Sci 203(1153):405-426
-
Wadhwa N, Rubinstein M, Durand F, Freeman WT (2013) Phase-based video motion processing. ACM Trans Graph 32(4):7
-
Sutton MA, Orteu Jl, Schreier HW (2009) Image correlation forshaper. Springer, Motion and Deformation Measurements
-
Leifer J, Weems BI, Kienle SC, Sims AM (2011)Three-dimensionalacceleration measurement using videogrammetry tracking data. ExpMech 51(2):199-217
7.Sabato A, Sarraf A, Mao Z, Niezrecki C (2018)Advancementsin Structural Health Monitoring Using Vision-Based and OpticalTechniques
-
Rajan S, Sutton MA, Rizos DC, Ortiz AR, Zeitouni A, CaicedoJM (2018)A stereovision deformation measurement system for transfer length estimates in prestressed concrete. Exp Mech58(7):1035-1048
-
Chan B, Guan H, Jo J, Blumenstein M (2015)Towards UAV-based bridge inspection systems: a review and an application perspective. Struct Monit Maint 2(3):283-300
-
Yeum CM, Dyke SJ(2015)Vision-based automated crack detection for bridge inspection. Comput Aided Civ Inf Eng30(10):759-770
-
Lattanzi D, Miller G(2017)Review of robotic infrastructure inspection systems. J Inf Syst 23(3):04017004
-
Akbar MA, Qidwai U, Jahanshahi MR (2019)An evaluation of image-based structural health monitoring using integrated unmanned aerial vehicle platform. Struct Control Health Monit 26(1):e2276
-
Reagan D, Sabato A, Niezrecki C (2017) Unmanned aerial vehicle acquisition of three-dimensional digital image correlation measurements for structural health monitoring of bridges. In: StructuraHealth Monitoring: An International Journal
-
Catt S, Fick B, Hoskins M, Praski J, Baqersad J (2019) Development of a semi-autonomous drone for structural health monitoring of structures using Digital lmage Correlation (DIC). In: Structural Health Monitoring, Photogrammetry&DIC, vol6.Springer International Publishing, p49-57
-
Kalaitzakis M, Kattil SR, Vitzilaios N, Rizos D, Sutton M (2019)Dynamic structural health monitoring using a DIC-enabled droneIn: 2019 International Conference on Unmanned Aircraft Systems(ICUAS)
-
Quigley M, Gerkey BP, Conley K, Faust J, Foote T. Leibs J, Berger E, Wheeler R, Ng AY, Gerkey BP, Faust J, Foote T, LeibsJ, Wheeler R, Ng AY (2009)ROS: an open-source Robot Operating System
17.Wang YO, Sutton MA, Bruck HA, Schreier HW(2009) Quantitative error assessment in pattern matching: efects of intensity pattern noise, interpolation, strain and image contrast on motionmeasurements. Strain 45(2):160-178.
-
Balcaen R, Reu PL, Lava P, Debruyne D (2018) Infuence of camera rotation on stereo-DIC and compensation methods. Exp Mech58(7):1101-111419.
-
Balcaen R, Lavatelli A, Jiménez-Peña C, Pfeiffer H, Zappa E.Debruyne D (2019)Impact of motion blur on stereo-digital imagecorrelation with the focus on a drone-carried stereo rig. Strain55(1):e12300.
-
Zeitouni Al, Rizos DC, Qian Y(2018) Benefits of high strength reduced modulus (HSRM) concrete railroad ties under center binding support conditions. Constr Build Mater 192:210-22321.
-
Jones E, ladicola M (2018)A good practices guide for digitalimage correlation. International Digital lmage Correlation Society
-
Sutton MA, Matta F, Rizos D, Ghorbani R, Rajan S, Mollenhauer DH, Schreier HW, Lasprilla AO (2017) Recent progress in digital image correlation: background and developments since the 2013 W M Murray lecture. Exp Mech 57(1):1-30
-
Wang Z, Wang S, Wang Z(2013)The elimination of pseudo strains in 2D-DIC caused by out-ofplane translation using light strip method. In: SPIE
-
Valle V, Hedan S, Cosenza P, Fauchille A-L (2014) Digital image correlation development for the study of materials including multiple crossing cracks.Exp Mech 55:379391
25.Ghorbani M, Matta F, Sutton M (2015)Full-feld deformation measurement and crack mapping on confined masonry walls using digital image correlation. Exp Mech 55:227-243
Publisher's Note: Springer Nature remains neutral with regard tojurisdictional claims in published maps and institutional affliations.
原英文文献请检索原文:
Kalaitzakis, M., Vitzilaios, N., Rizos, D.C. et al. Drone-Based StereoDIC: System Development, Experimental Validation and Infrastructure Application. Exp Mech 61, 981--996 (2021). https://doi.org/10.1007/s11340-021-00710-z