双机并联自适应虚拟阻抗下垂控制(droop)MATLAB仿真模型 下垂控制 电压电流双环控制 锁相环 有参考文献 模块完整,运行曲线完美,适合作为基础模型!! MATLAB2018b及以上版本。
在电力系统的研究领域,双机并联自适应虚拟阻抗下垂控制(droop)是一个极为关键的话题。今天就跟大家分享一下基于MATLAB搭建的相关仿真模型,这可是个模块完整、运行曲线完美,特别适合作为基础模型来深入研究的宝贝。不过要注意哦,这个模型适用于MATLAB2018b及以上版本。
下垂控制(droop)
下垂控制在分布式发电系统的并联运行中起着核心作用。简单来说,它通过调节逆变器输出电压的幅值和频率,来实现功率的合理分配。
其基本原理公式大概长这样:
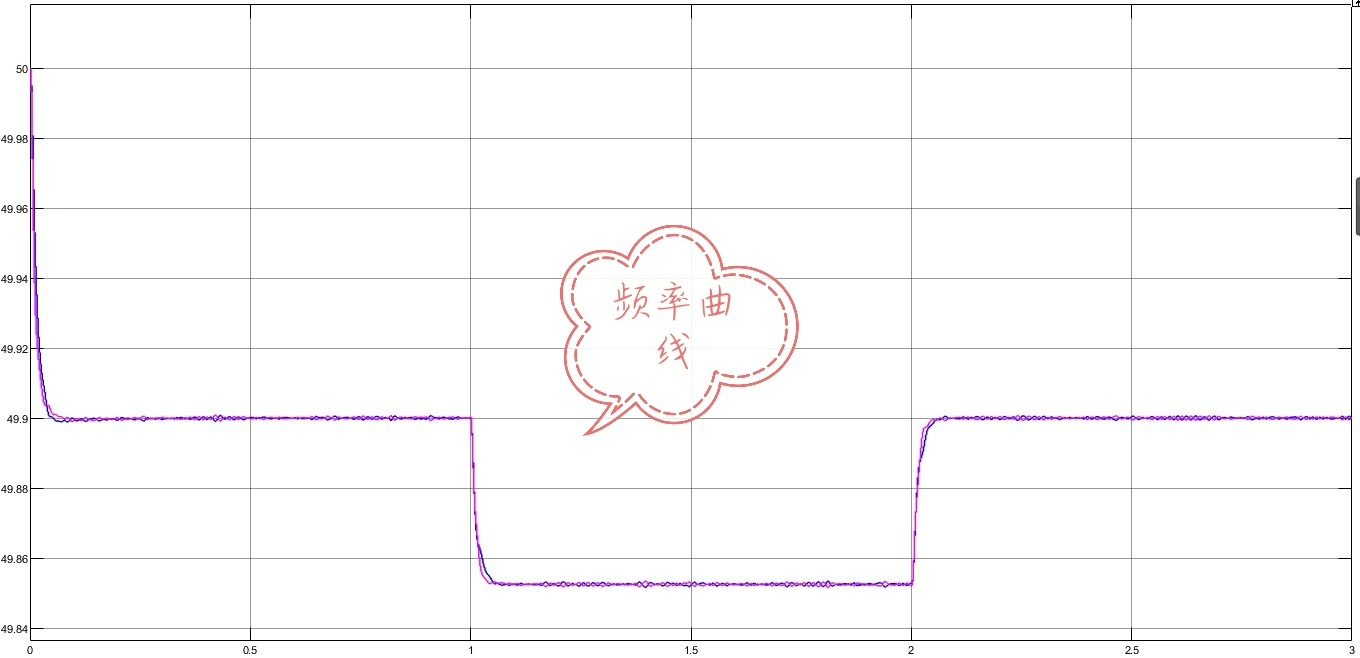
\ f = f*0 - k*p(P - P_0) \\
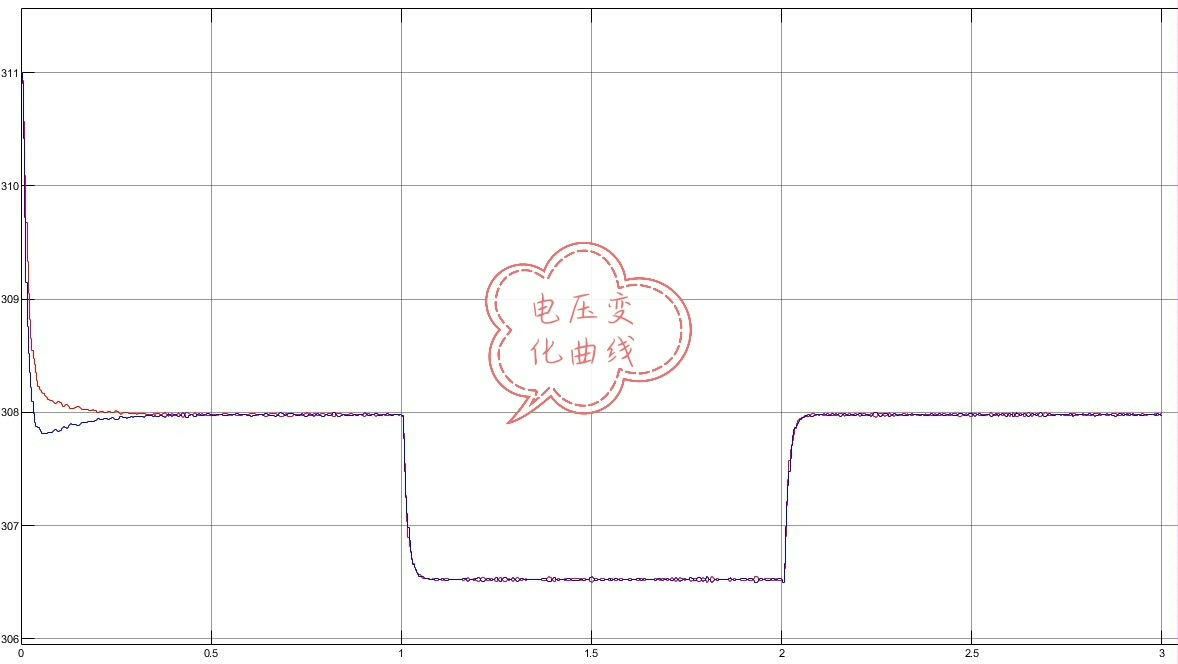
\ V = V*0 - k*q(Q - Q_0) \\
这里 \( f \) 是频率, \( f0 \) 是额定频率, \( k p \) 是有功功率 - 频率下垂系数, \( P \) 是输出有功功率, \( P0 \) 是额定有功功率; \( V \) 是电压幅值, \( V 0 \) 是额定电压幅值, \( kq \) 是无功功率 - 电压下垂系数, \( Q \) 是输出无功功率, \( Q0 \) 是额定无功功率。
在MATLAB里实现下垂控制的代码可能类似这样:
matlab
% 定义下垂系数
kp = 0.01;
kq = 0.001;
% 假设获取到的功率值
P = 0.8;
Q = 0.6;
% 额定值
f0 = 50;
V0 = 1;
% 计算频率和电压
f = f0 - kp * (P - 0);
V = V0 - kq * (Q - 0); 在这段代码里,我们先设定了下垂系数 \( kp \) 和 \( kq \),这就好比给系统设定了调节的"松紧度"。然后假设获取到了当前的有功功率 \( P \) 和无功功率 \( Q \),通过之前提到的公式计算出调整后的频率 \( f \) 和电压 \( V \)。
电压电流双环控制
电压电流双环控制是确保逆变器输出高质量电能的重要手段。外环电压环主要负责稳定输出电压的幅值和相位,内环电流环则对电流进行快速跟踪控制,提高系统的动态响应性能。
在MATLAB中搭建双环控制模型代码示例(简单示意):
matlab
% 定义电压环PI参数
Kpv = 0.5;
Kiv = 0.1;
% 定义电流环PI参数
Kpi = 1;
Kii = 0.5;
% 假设反馈的电压和电流值
V_fb = 0.98;
I_fb = 0.95;
% 电压环计算
error_v = V_ref - V_fb;
control_signal_v = Kpv * error_v + Kiv * cumsum(error_v);
% 电流环计算
error_i = control_signal_v - I_fb;
control_signal_i = Kpi * error_i + Kii * cumsum(error_i); 这里我们先设定了电压环和电流环各自的PI控制器参数,PI控制器就像是系统的"智能调节器",根据反馈回来的电压 \( Vfb \) 和电流 \( Ifb \) 与参考值的误差,不断调整输出信号,让系统能稳定运行。
锁相环
锁相环(PLL)在这个模型里的作用是准确跟踪电网电压的相位和频率,确保逆变器输出电压与电网电压同步。这对于实现可靠的并网运行至关重要。
MATLAB实现简单锁相环功能的代码片段:
matlab
% 定义锁相环参数
Kp_pll = 0.01;
Ki_pll = 0.001;
% 假设电网电压和逆变器输出电压信号
V_grid = sin(2 * pi * 50 * t);
V_inv = sin(2 * pi * 50 * t + theta);
% 计算相位误差
error_pll = angle(V_grid) - angle(V_inv);
% 锁相环PI调节
theta_dot = Kp_pll * error_pll + Ki_pll * cumsum(error_pll);
theta = theta + theta_dot * dt; 在这段代码里,通过比较电网电压 \( Vgrid \) 和逆变器输出电压 \( Vinv \) 的相位,得到相位误差 \( error_pll \),再利用PI控制器调整相位,使逆变器输出电压能紧紧"锁住"电网电压的相位。
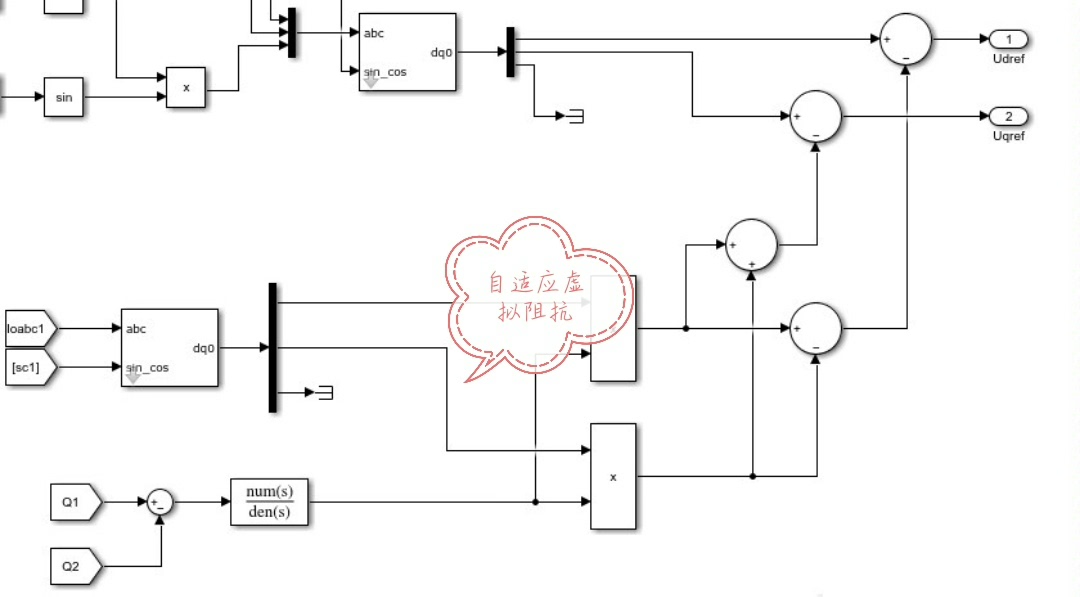
整体模型及参考文献
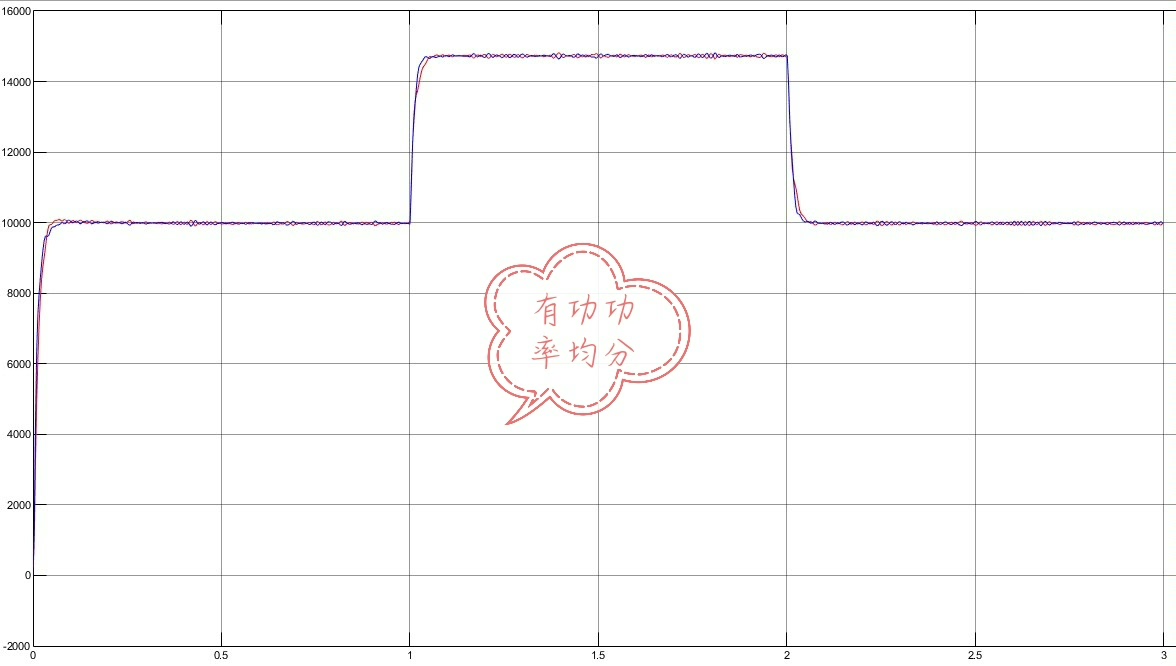
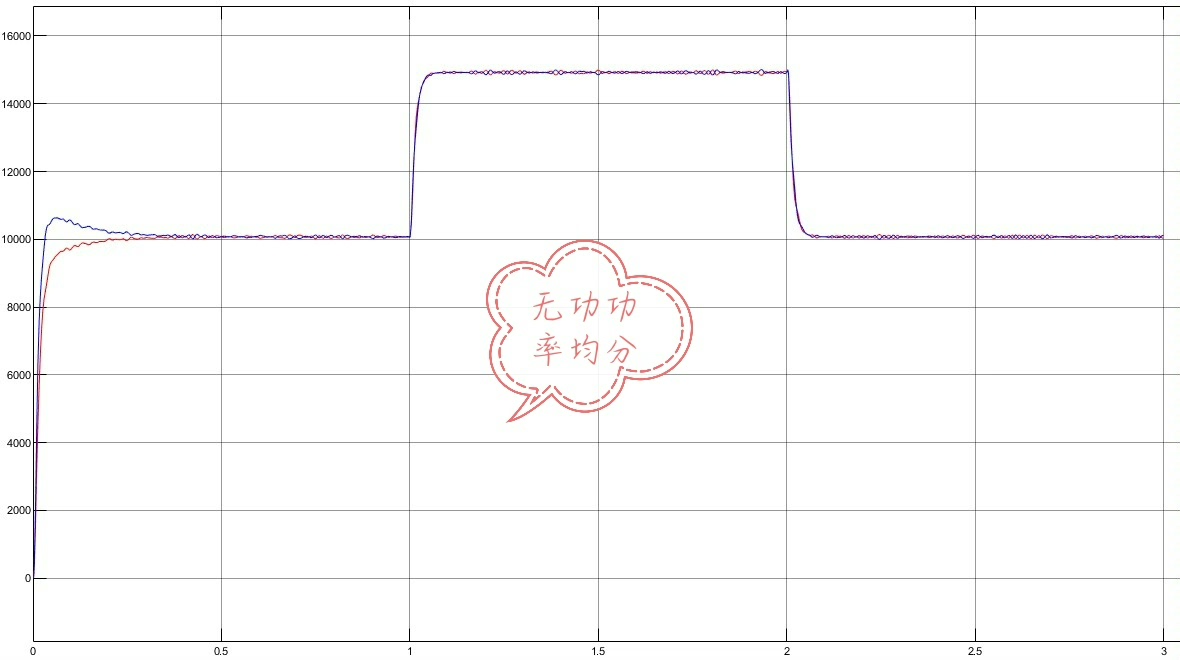
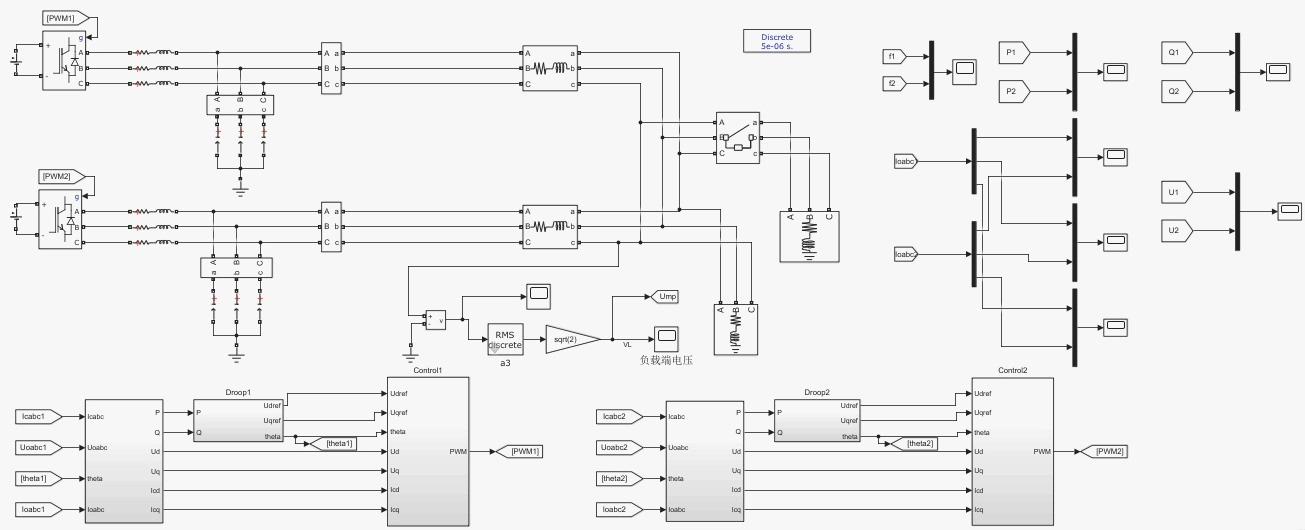
这个双机并联自适应虚拟阻抗下垂控制(droop)MATLAB仿真模型,将下垂控制、电压电流双环控制以及锁相环等关键模块完美整合在一起。每个模块相互协作,最终呈现出完美的运行曲线。
关于这个模型的具体实现和理论基础,大家可以参考具体参考文献。通过深入研读参考文献里的内容,再结合这个基础模型,相信各位对双机并联自适应虚拟阻抗下垂控制(droop)能有更透彻的理解,也能基于此进行更多有创意的拓展研究。
希望今天分享的这个MATLAB仿真模型能为大家在相关领域的研究带来启发和帮助!