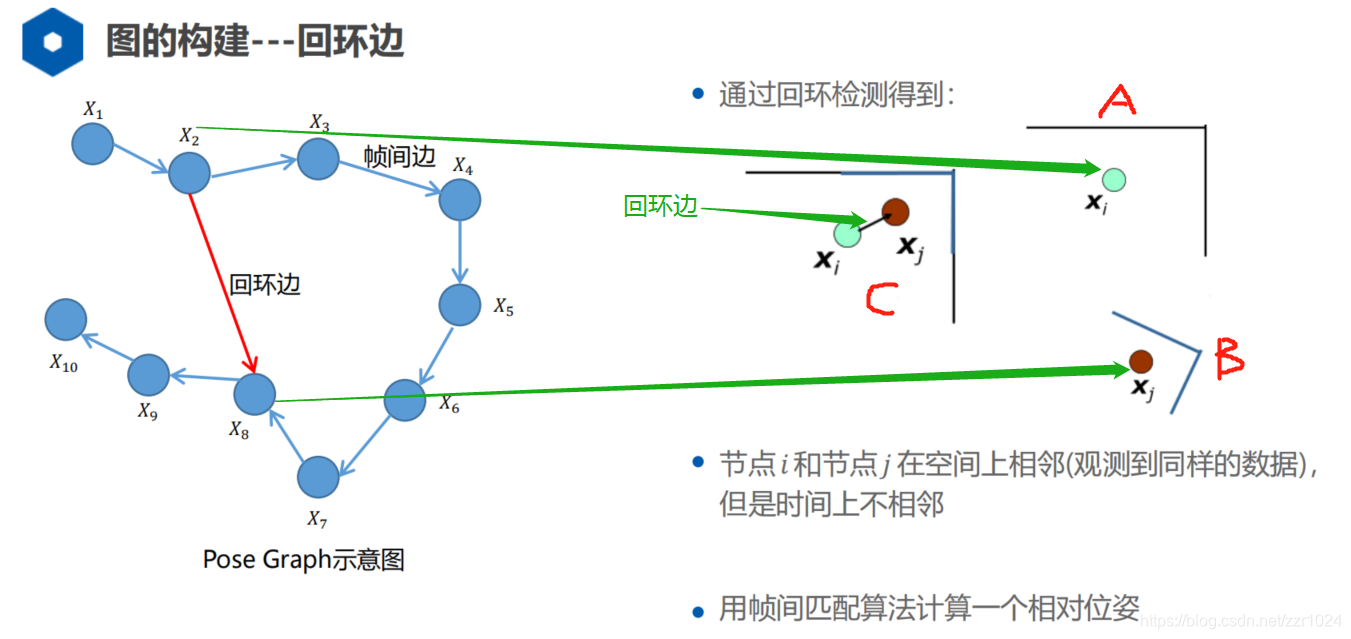
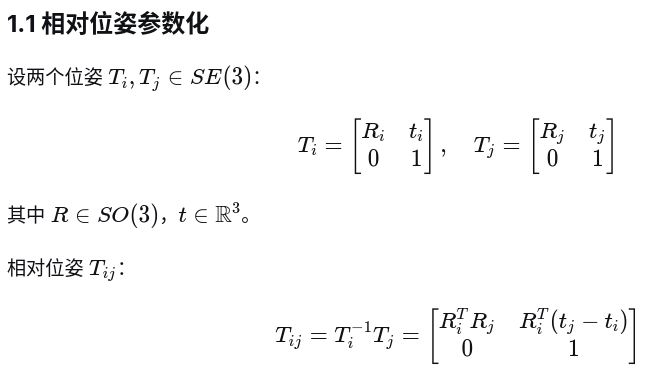
本节开始讲解SO3+t的形式来推导相对位姿之间的雅可比跟残差,因为在实际求解过程中,也可能只有纯旋转或者纯平移的情况,因此,这里采用分开方式推导,从而兼容这种单一融合的需求,接下来依然沿用之前的图
一. 右扰动问题描述
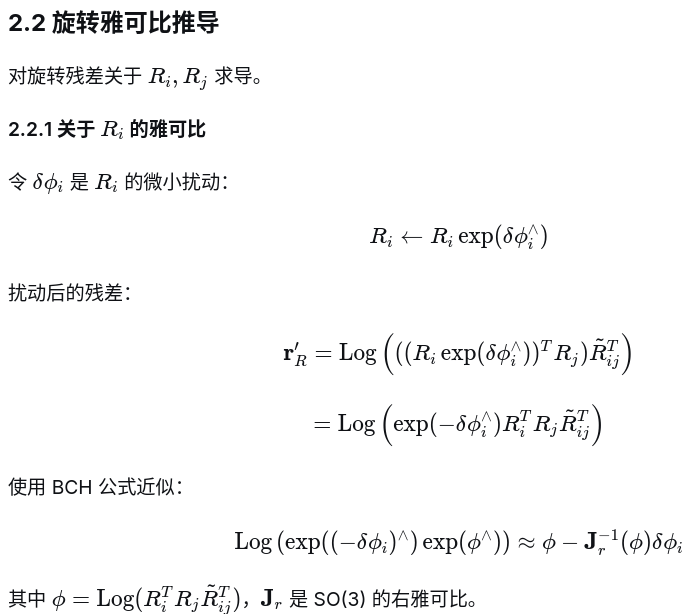
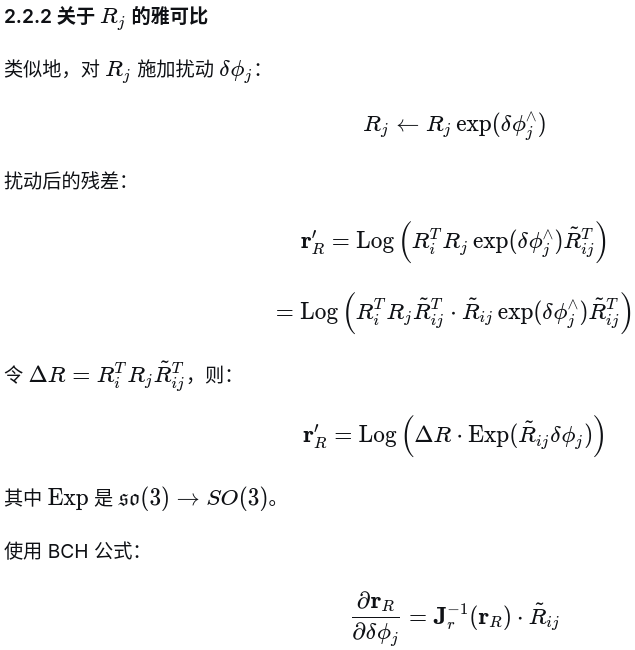
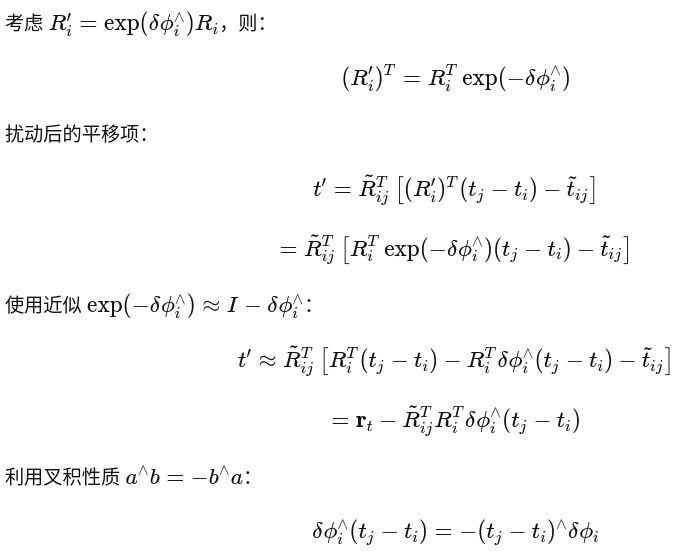
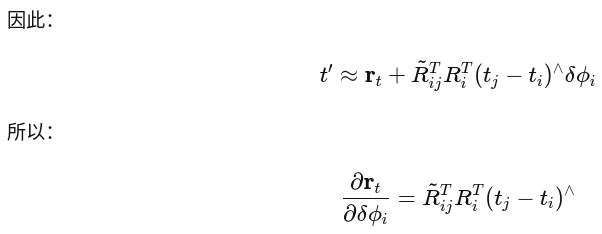
二. 旋转部分

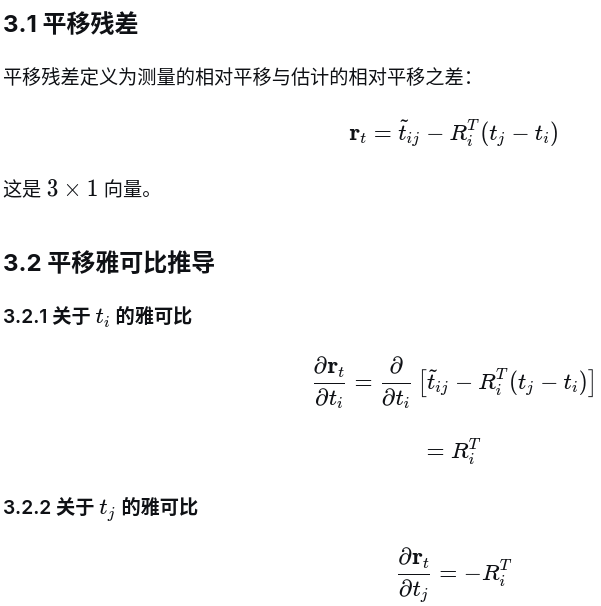
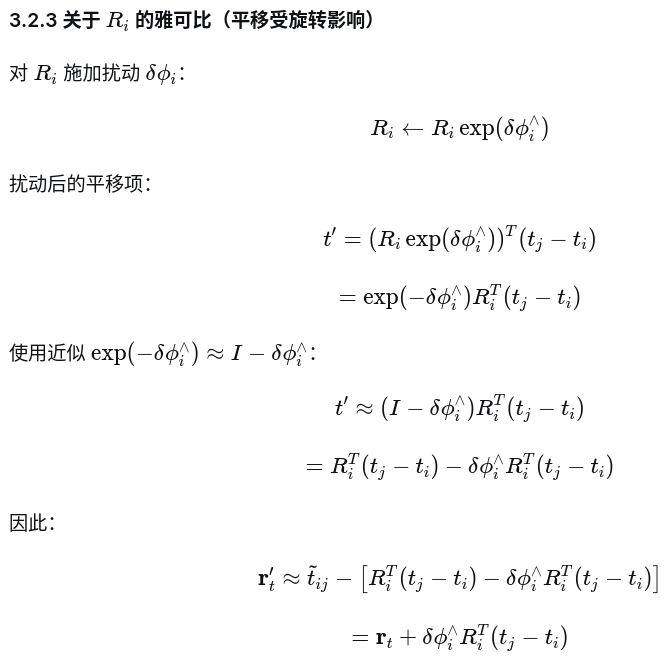
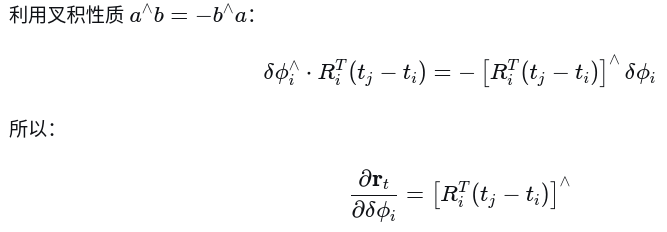
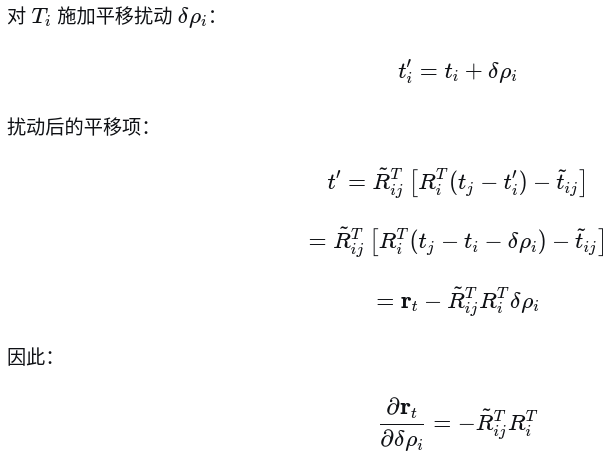
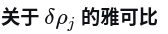
三. 平移部分
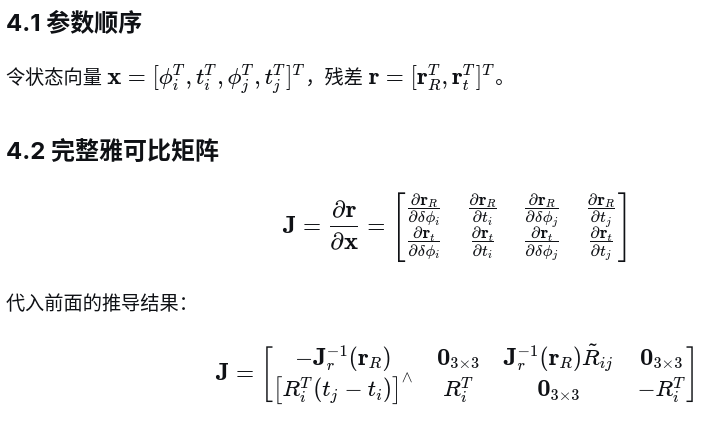
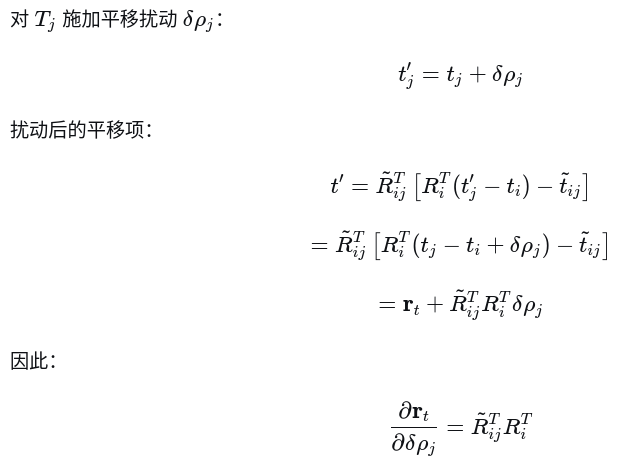
四. 完整雅可比矩阵
4.3 SO(3) 右雅可比
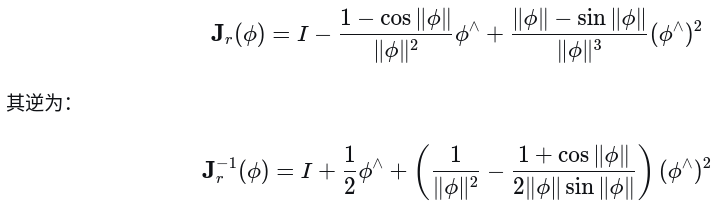
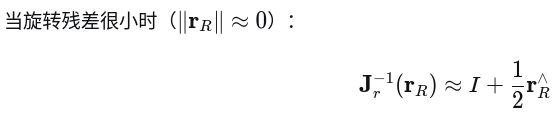
小角度近似
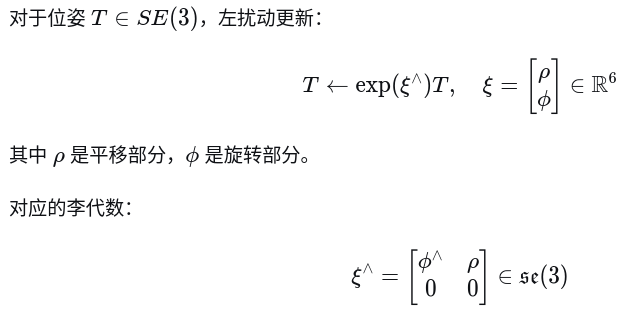
五. 左扰动模型
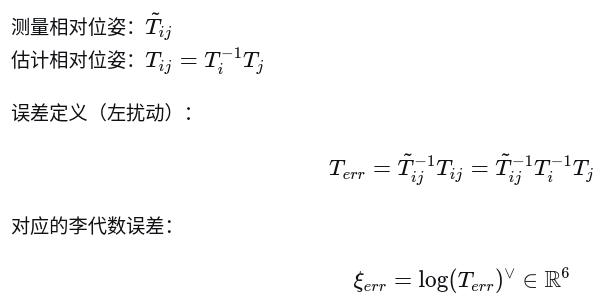
5.1 相对位姿残差
5.2 旋转部分(使用左扰动)
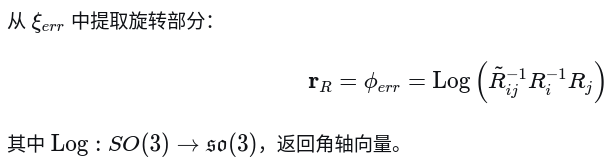
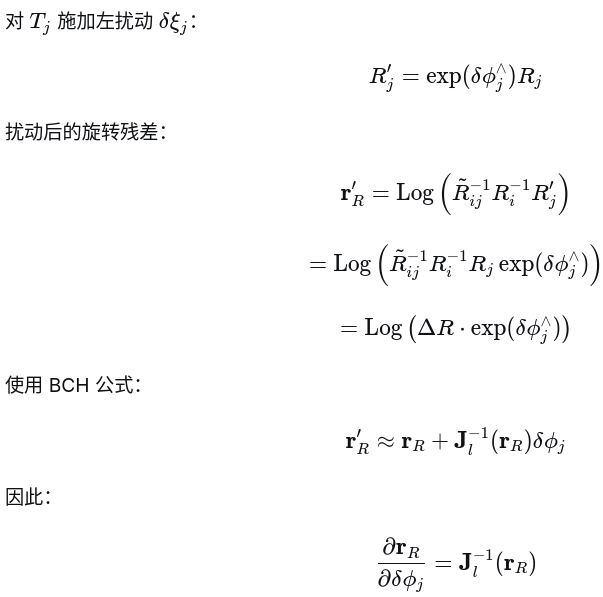
5.2.1 旋转残差
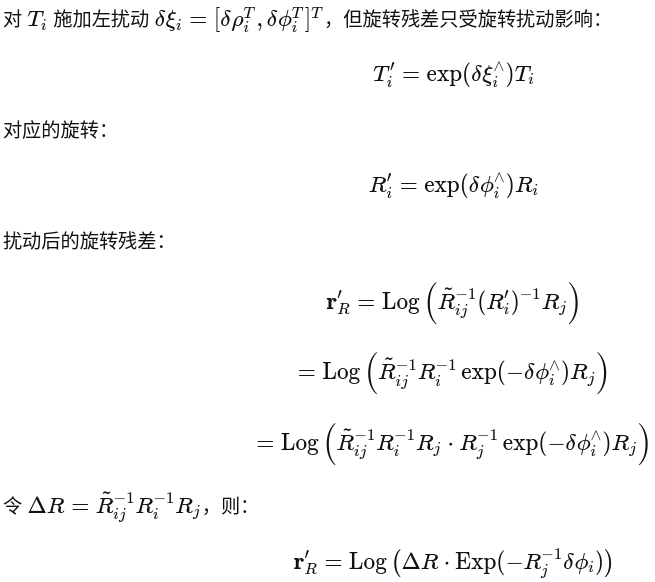
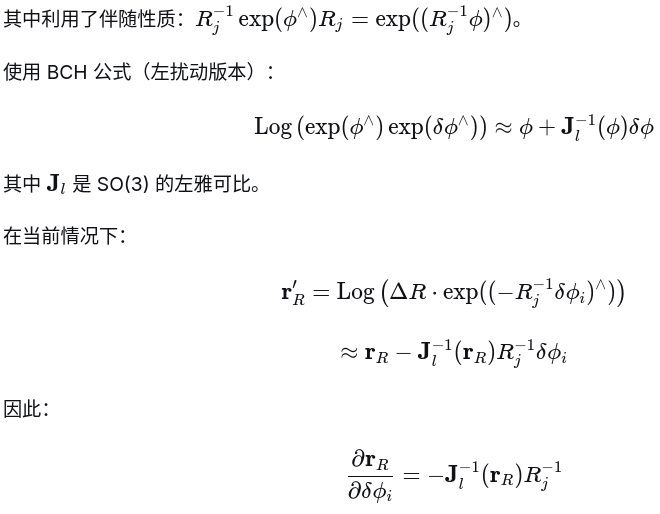
5.2.2旋转雅可比(左扰动)
5.2.3平移残差
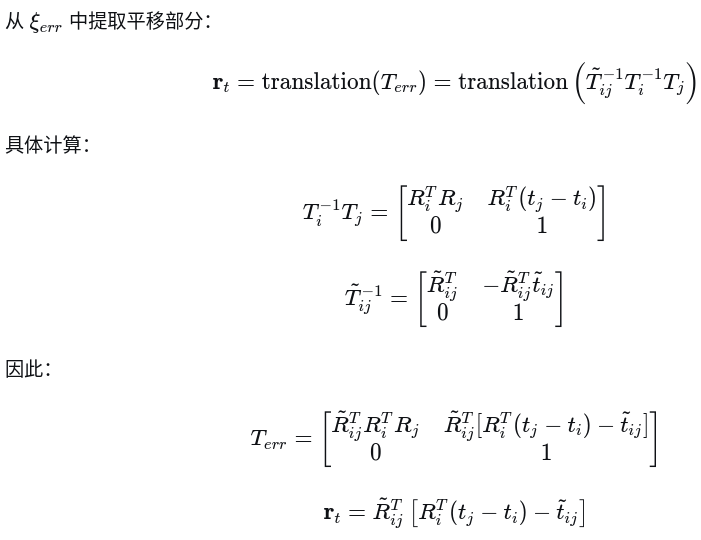
5.2.4 平移雅可比(左扰动)



**六.**完整雅可比矩阵(左扰动)
参数顺序

完整雅可比矩阵
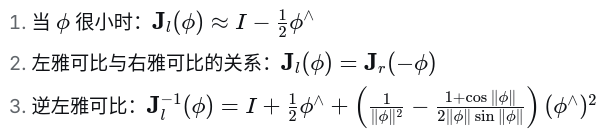
SO(3) 左雅可比

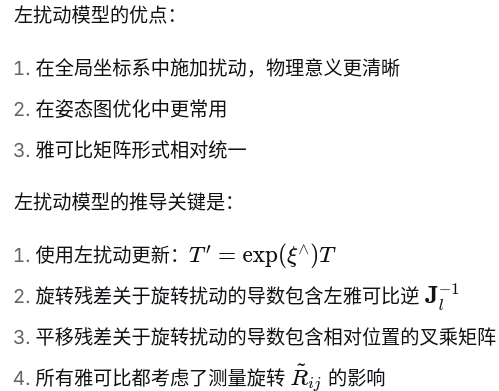
左雅可比的性质
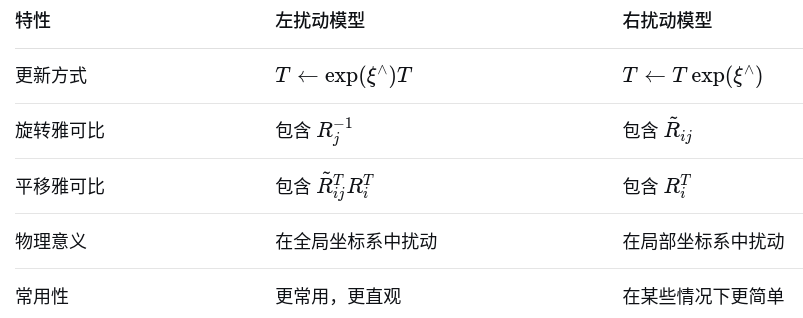
总结(左扰动 vs 右扰动)