按下亮,松开灭
单函数实现
c
#include <ap_int.h>
void my_led_key(
ap_uint<1> key, // 按键输入
ap_uint<1> *led // LED 输出
){
#pragma HLS INTERFACE ap_none port=key
#pragma HLS INTERFACE ap_none port=led
#pragma HLS INTERFACE ap_ctrl_none port=return
if(key == 1){
*led = 1;
}
else{
*led = 0;
}
}class 实现
c
#include <ap_int.h>
class LEDController {
public:
ap_uint<1> led_state;
LEDController() : led_state(0) {} // 构造函数初始化 LED
// 更新 LED,根据按键状态
void update(ap_uint<1> key) {
if(key == 1){
led_state = 1;
}
else{
led_state = 0;
}
}
ap_uint<1> get_state() const {
return led_state;
}
};
// 顶层 HLS 函数
void my_led_key(ap_uint<1> key, ap_uint<1> *led) {
#pragma HLS INTERFACE ap_none port=key
#pragma HLS INTERFACE ap_none port=led
#pragma HLS INTERFACE ap_ctrl_none port=return
static LEDController led_ctrl; // 静态对象保存状态
led_ctrl.update(key); // 根据按键更新状态
*led = led_ctrl.get_state(); // 输出到物理 LED
}输出
verilog
`timescale 1 ns / 1 ps
module my_led_key (
key,
led
);
input [0:0] key;
output [0:0] led;
assign led = key;
endmodule //my_led_key按下闪,松开灭
单函数实现
c
#include <ap_int.h>
#define DELAY 5000000 // 延时计数,可根据 FPGA 时钟和闪烁速度调整
void my_led_key(
ap_uint<1> key, // 按键输入(低有效)
ap_uint<1> *led, // LED 输出
){
#pragma HLS INTERFACE ap_none port=key
#pragma HLS INTERFACE ap_none port=led
#pragma HLS INTERFACE ap_ctrl_none port=return
static ap_uint<32> cnt = 0; // 延时计数
static ap_uint<1> led_state = 0;
if(key == 0){ // 按键按下
if(cnt < DELAY){
cnt++;
} else {
cnt = 0;
led_state = ~led_state; // 翻转 LED
}
} else {
cnt = 0;
led_state = 0; // LED 熄灭
}
*led = led_state;
}Protothread实现
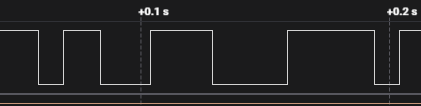
协程0产生不规则方波, 协程1 按键按下闪烁,松手熄灭
c
#include <ap_int.h>
#include <stdint.h>
#ifndef __PROTOTHREAD_H__
#define __PROTOTHREAD_H__
//1ms的时钟周期数
#define PT_THREAD_TICK_MS 27000
class Protothread;
typedef void (*PtRunFun)(Protothread * pt);
class Protothread
{
public:
Protothread(){m_delay = 0; m_state=0;m_next_state=0;}
virtual ~Protothread() { }
void Restart() { _ptLine = 0; }
void Stop() { _ptLine = LineNumberInvalid; }
bool IsRunning() { return _ptLine != LineNumberInvalid; }
void PtOsDelay(uint32_t tick){m_delay=tick;}
void PtOsDelayMs(uint32_t ms){m_delay=ms*PT_THREAD_TICK_MS;}
bool Run(){return true;}
protected:
uint32_t m_delay;
typedef unsigned short LineNumber;
static const LineNumber LineNumberInvalid = (LineNumber)(-1);
LineNumber _ptLine;
public:
uint32_t m_state;
uint32_t m_next_state;
ap_uint<1> m_indata;
ap_uint<1> m_outdata;
};
#define PT_BEGIN() bool ptYielded = true; (void) ptYielded; switch (_ptLine) { case 0:
#define PT_END() default: ; } Stop(); return false;
#define PT_WAIT_UNTIL(condition) \
do { _ptLine = __LINE__; case __LINE__: \
if (!(condition)) return true; } while (0)
#define PT_WAIT_WHILE(condition) PT_WAIT_UNTIL(!(condition))
#define PT_WAIT_THREAD(child) PT_WAIT_WHILE((child).Run())
#define PT_SPAWN(child) \
do { (child).Restart(); PT_WAIT_THREAD(child); } while (0)
#define PT_RESTART() do { Restart(); return true; } while (0)
#define PT_EXIT() do { Stop(); return false; } while (0)
#define PT_YIELD() \
do { ptYielded = false; _ptLine = __LINE__; case __LINE__: \
if (!ptYielded) return true; } while (0)
#define PT_YIELD_UNTIL(condition) \
do { ptYielded = false; _ptLine = __LINE__; case __LINE__: \
if (!ptYielded || !(condition)) return true; } while (0)
#define PT_DELAY(v) \
do { \
m_delay = v; \
PT_WAIT_UNTIL(m_delay == 0); \
} while(0)
#define PT_DELAY_MS(v) \
do { \
m_delay = v*PT_THREAD_TICK_MS; \
PT_WAIT_UNTIL(m_delay == 0); \
} while(0)
#define WHILE(a) PT_BEGIN(); \
while(1)
#define __ON_TICK__ void OnTick(){ if(m_delay==0){Run();}else{m_delay--;}}
#endif
class LedPt0 : public Protothread {
public: __ON_TICK__
bool Run() {
WHILE(1) {
PT_DELAY_MS(10);
m_outdata=1^m_outdata;
PT_DELAY_MS(15);
m_outdata=1^m_outdata;
PT_DELAY_MS(20);
m_outdata=1^m_outdata;
PT_DELAY_MS(25);
m_outdata=1^m_outdata;
PT_DELAY_MS(30);
m_outdata=1^m_outdata;
PT_DELAY_MS(35);
m_outdata=1^m_outdata;
}
PT_END();
}
};
class LedPt1 : public Protothread {
public: __ON_TICK__
bool Run() {
// 延时1s
PtOsDelayMs(1000);
//按下闪,松开灭
if(m_indata==0){
m_outdata=1^m_outdata;
}else{
m_outdata=1;
}
return 0;
}
};
void my_led_key(
ap_uint<1> key, // 按键输入(低有效)
ap_uint<2> *led, // LED 输出
){
#pragma HLS INTERFACE ap_none port=key
#pragma HLS INTERFACE ap_none port=led
#pragma HLS INTERFACE ap_ctrl_none port=return
static LedPt0 ledPt0;
static LedPt1 ledPt1;
ledPt0.m_indata=key;
ledPt1.m_indata=key;
ledPt0.OnTick();
ledPt1.OnTick();
*led = ledPt1.m_outdata *2 + ledPt0.m_outdata;
}输出
verilog
`timescale 1 ns / 1 ps
module my_led_key (
ap_clk,
ap_rst,
key,
led
);
parameter ap_ST_fsm_state1 = 1'd1;
input ap_clk;
input ap_rst;
input [0:0] key;
output [0:0] led;
reg [0:0] led_state_V;
reg [22:0] cnt_V;
reg [0:0] ap_phi_mux_led_state_V_loc_0_phi_fu_54_p6;
(* fsm_encoding = "none" *) reg [0:0] ap_CS_fsm;
wire ap_CS_fsm_state1;
wire [0:0] key_read_read_fu_38_p2;
wire [0:0] icmp_ln878_fu_79_p2;
wire [0:0] r_fu_85_p2;
wire [22:0] add_ln691_fu_98_p2;
reg [0:0] ap_NS_fsm;
wire ap_ce_reg;
// power-on initialization
initial begin
#0 led_state_V = 1'd0;
#0 cnt_V = 23'd0;
#0 ap_CS_fsm = 1'd1;
end
always @ (posedge ap_clk) begin
if (ap_rst == 1'b1) begin
ap_CS_fsm <= ap_ST_fsm_state1;
end else begin
ap_CS_fsm <= ap_NS_fsm;
end
end
always @ (posedge ap_clk) begin
if (((icmp_ln878_fu_79_p2 == 1'd1) & (key_read_read_fu_38_p2 == 1'd0) & (1'b1 == ap_CS_fsm_state1))) begin
cnt_V <= add_ln691_fu_98_p2;
end else if ((((icmp_ln878_fu_79_p2 == 1'd0) & (key_read_read_fu_38_p2 == 1'd0) & (1'b1 == ap_CS_fsm_state1)) | ((key_read_read_fu_38_p2 == 1'd1) & (1'b1 == ap_CS_fsm_state1)))) begin
cnt_V <= 23'd0;
end
end
always @ (posedge ap_clk) begin
if ((1'b1 == ap_CS_fsm_state1)) begin
if ((key_read_read_fu_38_p2 == 1'd1)) begin
led_state_V <= 1'd0;
end else if (((icmp_ln878_fu_79_p2 == 1'd0) & (key_read_read_fu_38_p2 == 1'd0))) begin
led_state_V <= r_fu_85_p2;
end
end
end
always @ (*) begin
if ((1'b1 == ap_CS_fsm_state1)) begin
if (((icmp_ln878_fu_79_p2 == 1'd0) & (key_read_read_fu_38_p2 == 1'd0))) begin
ap_phi_mux_led_state_V_loc_0_phi_fu_54_p6 = r_fu_85_p2;
end else if (((icmp_ln878_fu_79_p2 == 1'd1) & (key_read_read_fu_38_p2 == 1'd0))) begin
ap_phi_mux_led_state_V_loc_0_phi_fu_54_p6 = led_state_V;
end else if ((key_read_read_fu_38_p2 == 1'd1)) begin
ap_phi_mux_led_state_V_loc_0_phi_fu_54_p6 = 1'd0;
end else begin
ap_phi_mux_led_state_V_loc_0_phi_fu_54_p6 = 'bx;
end
end else begin
ap_phi_mux_led_state_V_loc_0_phi_fu_54_p6 = 'bx;
end
end
always @ (*) begin
case (ap_CS_fsm)
ap_ST_fsm_state1 : begin
ap_NS_fsm = ap_ST_fsm_state1;
end
default : begin
ap_NS_fsm = 'bx;
end
endcase
end
assign add_ln691_fu_98_p2 = (cnt_V + 23'd1);
assign ap_CS_fsm_state1 = ap_CS_fsm[32'd0];
assign icmp_ln878_fu_79_p2 = ((cnt_V < 23'd5000000) ? 1'b1 : 1'b0);
assign key_read_read_fu_38_p2 = key;
assign led = ap_phi_mux_led_state_V_loc_0_phi_fu_54_p6;
assign r_fu_85_p2 = (led_state_V ^ 1'd1);
endmodule //my_led_key点击,灯翻转
单个函数实现
c
#include <ap_int.h>
#define DEBOUNCE_DOWN 270000 //10ms 按下消抖计数,可根据 FPGA 时钟调整
#define DEBOUNCE_UP 270000 // 松开消抖计数
void my_led_key(
ap_uint<1> key, // 按键输入(低有效)
ap_uint<1> *led // LED 输出
){
#pragma HLS INTERFACE ap_none port=key
#pragma HLS INTERFACE ap_none port=led
#pragma HLS INTERFACE ap_ctrl_none port=return
static ap_uint<1> led_state = 0;
static ap_uint<1> key_d_f = 0; // 按下标志
static ap_uint<32> key_d_delay = 0; // 按下消抖计数
static ap_uint<32> key_u_delay = 0; // 松开消抖计数
// 按下逻辑(低有效)
if(key == 0){
key_d_delay++;
key_u_delay = 0;
if(key_d_delay >= DEBOUNCE_DOWN && key_d_f == 0){
key_d_f = 1; // 按下确认
led_state = ~led_state; // LED 翻转
}
} else { // 松开逻辑
key_d_delay = 0;
if(key_d_f == 1){
key_u_delay++;
if(key_u_delay >= DEBOUNCE_UP){
key_d_f = 0; // 按键释放确认
key_u_delay = 0;
}
}
}
*led = led_state;
}函数调用实现
c
#include <ap_int.h>
#define DEBOUNCE_DOWN 270000
#define DEBOUNCE_UP 270000
struct KeyState {
ap_uint<1> key_d_f;
ap_uint<32> key_d_delay;
ap_uint<32> key_u_delay;
};
ap_uint<1> key_should_toggle(ap_uint<1> key, KeyState &ks) {
#pragma HLS INLINE
ap_uint<1> toggle = 0;
if(key == 0){
ks.key_d_delay++;
ks.key_u_delay = 0;
if(ks.key_d_delay >= DEBOUNCE_DOWN && ks.key_d_f == 0){
ks.key_d_f = 1;
toggle = 1;
}
} else {
ks.key_d_delay = 0;
if(ks.key_d_f == 1){
ks.key_u_delay++;
if(ks.key_u_delay >= DEBOUNCE_UP){
ks.key_d_f = 0;
ks.key_u_delay = 0;
}
}
}
return toggle;
}
void my_led_key(ap_uint<1> key, ap_uint<1> *led) {
#pragma HLS INTERFACE ap_none port=key
#pragma HLS INTERFACE ap_none port=led
#pragma HLS INTERFACE ap_ctrl_none port=return
// 静态变量保存状态
static ap_uint<1> led_state = 0;
static KeyState ks = {0,0,0};
// 按键消抖判断是否翻转 LED
if(key_should_toggle(key, ks)){
led_state = ~led_state;
}
*led = led_state;
}输出
verilog
`timescale 1 ns / 1 ps
module my_led_key (
ap_clk,
ap_rst,
key,
led
);
parameter ap_ST_fsm_state1 = 2'd1;
parameter ap_ST_fsm_state2 = 2'd2;
input ap_clk;
input ap_rst;
input [0:0] key;
output [0:0] led;
reg [31:0] key_u_delay_V;
reg [0:0] key_d_f_V;
reg [0:0] led_state_V;
reg [31:0] key_d_delay_V;
wire [0:0] key_read_read_fu_44_p2;
(* fsm_encoding = "none" *) reg [1:0] ap_CS_fsm;
wire ap_CS_fsm_state1;
wire [0:0] or_ln23_fu_150_p2;
reg [0:0] or_ln23_reg_214;
wire [31:0] add_ln691_1_fu_162_p2;
wire [0:0] key_d_f_V_load_load_fu_120_p1;
reg [0:0] ap_phi_mux_key_u_delay_V_flag_0_phi_fu_62_p10;
reg [0:0] key_u_delay_V_flag_0_reg_57;
wire [0:0] icmp_ln882_fu_168_p2;
wire ap_CS_fsm_state2;
reg [31:0] ap_phi_mux_key_u_delay_V_new_0_phi_fu_84_p10;
reg [31:0] key_u_delay_V_new_0_reg_79;
reg [0:0] ap_phi_mux_led_state_V_loc_0_phi_fu_103_p10;
reg [0:0] led_state_V_loc_0_reg_100;
wire [0:0] r_fu_186_p2;
wire [31:0] add_ln691_fu_132_p2;
wire [0:0] icmp_ln23_fu_144_p2;
reg [1:0] ap_NS_fsm;
wire ap_ce_reg;
// power-on initialization
initial begin
#0 key_u_delay_V = 32'd0;
#0 key_d_f_V = 1'd0;
#0 led_state_V = 1'd0;
#0 key_d_delay_V = 32'd0;
#0 ap_CS_fsm = 2'd1;
end
always @ (posedge ap_clk) begin
if (ap_rst == 1'b1) begin
ap_CS_fsm <= ap_ST_fsm_state1;
end else begin
ap_CS_fsm <= ap_NS_fsm;
end
end
always @ (posedge ap_clk) begin
if ((1'b1 == ap_CS_fsm_state1)) begin
if ((key_read_read_fu_44_p2 == 1'd1)) begin
key_d_delay_V <= 32'd0;
end else if ((key_read_read_fu_44_p2 == 1'd0)) begin
key_d_delay_V <= add_ln691_fu_132_p2;
end
end
end
always @ (posedge ap_clk) begin
if (((icmp_ln882_fu_168_p2 == 1'd1) & (key_d_f_V_load_load_fu_120_p1 == 1'd1) & (1'b1 == ap_CS_fsm_state1) & (key_read_read_fu_44_p2 == 1'd1))) begin
key_d_f_V <= 1'd0;
end else if (((or_ln23_reg_214 == 1'd0) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0))) begin
key_d_f_V <= 1'd1;
end
end
always @ (posedge ap_clk) begin
if (((key_d_f_V_load_load_fu_120_p1 == 1'd0) & (1'b1 == ap_CS_fsm_state1) & (key_read_read_fu_44_p2 == 1'd1))) begin
key_u_delay_V_flag_0_reg_57 <= 1'd0;
end else if ((((or_ln23_reg_214 == 1'd1) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0)) | ((or_ln23_reg_214 == 1'd0) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0)) | ((icmp_ln882_fu_168_p2 == 1'd0) & (key_d_f_V_load_load_fu_120_p1 == 1'd1) & (1'b1 == ap_CS_fsm_state1) & (key_read_read_fu_44_p2 == 1'd1)) | ((icmp_ln882_fu_168_p2 == 1'd1) & (key_d_f_V_load_load_fu_120_p1 == 1'd1) & (1'b1 == ap_CS_fsm_state1) & (key_read_read_fu_44_p2 == 1'd1)))) begin
key_u_delay_V_flag_0_reg_57 <= 1'd1;
end
end
always @ (posedge ap_clk) begin
if (((icmp_ln882_fu_168_p2 == 1'd0) & (key_d_f_V_load_load_fu_120_p1 == 1'd1) & (1'b1 == ap_CS_fsm_state1) & (key_read_read_fu_44_p2 == 1'd1))) begin
key_u_delay_V_new_0_reg_79 <= add_ln691_1_fu_162_p2;
end else if ((((or_ln23_reg_214 == 1'd1) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0)) | ((or_ln23_reg_214 == 1'd0) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0)) | ((icmp_ln882_fu_168_p2 == 1'd1) & (key_d_f_V_load_load_fu_120_p1 == 1'd1) & (1'b1 == ap_CS_fsm_state1) & (key_read_read_fu_44_p2 == 1'd1)))) begin
key_u_delay_V_new_0_reg_79 <= 32'd0;
end
end
always @ (posedge ap_clk) begin
if (((or_ln23_reg_214 == 1'd0) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0))) begin
led_state_V_loc_0_reg_100 <= r_fu_186_p2;
end else if ((((or_ln23_reg_214 == 1'd1) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0)) | ((key_d_f_V_load_load_fu_120_p1 == 1'd0) & (1'b1 == ap_CS_fsm_state1) & (key_read_read_fu_44_p2 == 1'd1)) | ((icmp_ln882_fu_168_p2 == 1'd0) & (key_d_f_V_load_load_fu_120_p1 == 1'd1) & (1'b1 == ap_CS_fsm_state1) & (key_read_read_fu_44_p2 == 1'd1)) | ((icmp_ln882_fu_168_p2 == 1'd1) & (key_d_f_V_load_load_fu_120_p1 == 1'd1) & (1'b1 == ap_CS_fsm_state1) & (key_read_read_fu_44_p2 == 1'd1)))) begin
led_state_V_loc_0_reg_100 <= led_state_V;
end
end
always @ (posedge ap_clk) begin
if (((ap_phi_mux_key_u_delay_V_flag_0_phi_fu_62_p10 == 1'd1) & (1'b1 == ap_CS_fsm_state2))) begin
key_u_delay_V <= ap_phi_mux_key_u_delay_V_new_0_phi_fu_84_p10;
end
end
always @ (posedge ap_clk) begin
if (((or_ln23_reg_214 == 1'd0) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0))) begin
led_state_V <= r_fu_186_p2;
end
end
always @ (posedge ap_clk) begin
if (((1'b1 == ap_CS_fsm_state1) & (key_read_read_fu_44_p2 == 1'd0))) begin
or_ln23_reg_214 <= or_ln23_fu_150_p2;
end
end
always @ (*) begin
if ((((or_ln23_reg_214 == 1'd1) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0)) | ((or_ln23_reg_214 == 1'd0) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0)))) begin
ap_phi_mux_key_u_delay_V_flag_0_phi_fu_62_p10 = 1'd1;
end else begin
ap_phi_mux_key_u_delay_V_flag_0_phi_fu_62_p10 = key_u_delay_V_flag_0_reg_57;
end
end
always @ (*) begin
if ((((or_ln23_reg_214 == 1'd1) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0)) | ((or_ln23_reg_214 == 1'd0) & (1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0)))) begin
ap_phi_mux_key_u_delay_V_new_0_phi_fu_84_p10 = 32'd0;
end else begin
ap_phi_mux_key_u_delay_V_new_0_phi_fu_84_p10 = key_u_delay_V_new_0_reg_79;
end
end
always @ (*) begin
if (((1'b1 == ap_CS_fsm_state2) & (key_read_read_fu_44_p2 == 1'd0))) begin
if ((or_ln23_reg_214 == 1'd1)) begin
ap_phi_mux_led_state_V_loc_0_phi_fu_103_p10 = led_state_V;
end else if ((or_ln23_reg_214 == 1'd0)) begin
ap_phi_mux_led_state_V_loc_0_phi_fu_103_p10 = r_fu_186_p2;
end else begin
ap_phi_mux_led_state_V_loc_0_phi_fu_103_p10 = led_state_V_loc_0_reg_100;
end
end else begin
ap_phi_mux_led_state_V_loc_0_phi_fu_103_p10 = led_state_V_loc_0_reg_100;
end
end
always @ (*) begin
case (ap_CS_fsm)
ap_ST_fsm_state1 : begin
ap_NS_fsm = ap_ST_fsm_state2;
end
ap_ST_fsm_state2 : begin
ap_NS_fsm = ap_ST_fsm_state1;
end
default : begin
ap_NS_fsm = 'bx;
end
endcase
end
assign add_ln691_1_fu_162_p2 = (key_u_delay_V + 32'd1);
assign add_ln691_fu_132_p2 = (key_d_delay_V + 32'd1);
assign ap_CS_fsm_state1 = ap_CS_fsm[32'd0];
assign ap_CS_fsm_state2 = ap_CS_fsm[32'd1];
assign icmp_ln23_fu_144_p2 = ((add_ln691_fu_132_p2 < 32'd270000) ? 1'b1 : 1'b0);
assign icmp_ln882_fu_168_p2 = ((add_ln691_1_fu_162_p2 > 32'd269999) ? 1'b1 : 1'b0);
assign key_d_f_V_load_load_fu_120_p1 = key_d_f_V;
assign key_read_read_fu_44_p2 = key;
assign led = ap_phi_mux_led_state_V_loc_0_phi_fu_103_p10;
assign or_ln23_fu_150_p2 = (key_d_f_V | icmp_ln23_fu_144_p2);
assign r_fu_186_p2 = (led_state_V ^ 1'd1);
endmodule //my_led_keyaxi_lite寄存器0控制灯,寄存器1读按键
输入
c
#include <ap_int.h>
void my_led_key(
ap_uint<1> key_in, // FPGA 按键输入,低有效
ap_uint<1> &led_reg, // AXI4-Lite 寄存器 0:写1点亮,写0灭
ap_uint<1> &key_status, // AXI4-Lite 寄存器 1:读按键状态
ap_uint<1> &led_out // 物理 LED 端口
){
#pragma HLS INTERFACE ap_none port=key_in // 物理端口,顶层会暴露
#pragma HLS INTERFACE s_axilite port=led_reg bundle=CTRL_BUS
#pragma HLS INTERFACE s_axilite port=key_status bundle=CTRL_BUS
#pragma HLS INTERFACE ap_none port=led_out
#pragma HLS INTERFACE s_axilite port=return bundle=CTRL_BUS
static ap_uint<1> led_state = 0;
// LED 控制
led_state = led_reg;
led_out = led_state;
led_reg = led_state;
// 按键状态
key_status = key_in;
}输出
verolog
`timescale 1 ns / 1 ps
module my_led_key (
key_in,
led_out,
s_axi_CTRL_BUS_AWVALID,
s_axi_CTRL_BUS_AWREADY,
s_axi_CTRL_BUS_AWADDR,
s_axi_CTRL_BUS_WVALID,
s_axi_CTRL_BUS_WREADY,
s_axi_CTRL_BUS_WDATA,
s_axi_CTRL_BUS_WSTRB,
s_axi_CTRL_BUS_ARVALID,
s_axi_CTRL_BUS_ARREADY,
s_axi_CTRL_BUS_ARADDR,
s_axi_CTRL_BUS_RVALID,
s_axi_CTRL_BUS_RREADY,
s_axi_CTRL_BUS_RDATA,
s_axi_CTRL_BUS_RRESP,
s_axi_CTRL_BUS_BVALID,
s_axi_CTRL_BUS_BREADY,
s_axi_CTRL_BUS_BRESP,
ap_clk,
ap_rst_n,
interrupt
);
parameter C_S_AXI_CTRL_BUS_DATA_WIDTH = 32;
parameter C_S_AXI_CTRL_BUS_ADDR_WIDTH = 6;
parameter C_S_AXI_DATA_WIDTH = 32;
parameter C_S_AXI_CTRL_BUS_WSTRB_WIDTH = (32 / 8);
parameter C_S_AXI_WSTRB_WIDTH = (32 / 8);
input [0:0] key_in;
output [0:0] led_out;
input s_axi_CTRL_BUS_AWVALID;
output s_axi_CTRL_BUS_AWREADY;
input [C_S_AXI_CTRL_BUS_ADDR_WIDTH - 1:0] s_axi_CTRL_BUS_AWADDR;
input s_axi_CTRL_BUS_WVALID;
output s_axi_CTRL_BUS_WREADY;
input [C_S_AXI_CTRL_BUS_DATA_WIDTH - 1:0] s_axi_CTRL_BUS_WDATA;
input [C_S_AXI_CTRL_BUS_WSTRB_WIDTH - 1:0] s_axi_CTRL_BUS_WSTRB;
input s_axi_CTRL_BUS_ARVALID;
output s_axi_CTRL_BUS_ARREADY;
input [C_S_AXI_CTRL_BUS_ADDR_WIDTH - 1:0] s_axi_CTRL_BUS_ARADDR;
output s_axi_CTRL_BUS_RVALID;
input s_axi_CTRL_BUS_RREADY;
output [C_S_AXI_CTRL_BUS_DATA_WIDTH - 1:0] s_axi_CTRL_BUS_RDATA;
output [1:0] s_axi_CTRL_BUS_RRESP;
output s_axi_CTRL_BUS_BVALID;
input s_axi_CTRL_BUS_BREADY;
output [1:0] s_axi_CTRL_BUS_BRESP;
input ap_clk;
input ap_rst_n;
output interrupt;
wire ap_start;
wire ap_done;
wire ap_idle;
wire ap_ready;
wire [0:0] led_reg;
reg key_status_ap_vld;
reg ap_rst_n_inv;
wire ap_ce_reg;
my_led_key_CTRL_BUS_s_axi #(
.C_S_AXI_ADDR_WIDTH( C_S_AXI_CTRL_BUS_ADDR_WIDTH ),
.C_S_AXI_DATA_WIDTH( C_S_AXI_CTRL_BUS_DATA_WIDTH ))
CTRL_BUS_s_axi_U(
.AWVALID(s_axi_CTRL_BUS_AWVALID),
.AWREADY(s_axi_CTRL_BUS_AWREADY),
.AWADDR(s_axi_CTRL_BUS_AWADDR),
.WVALID(s_axi_CTRL_BUS_WVALID),
.WREADY(s_axi_CTRL_BUS_WREADY),
.WDATA(s_axi_CTRL_BUS_WDATA),
.WSTRB(s_axi_CTRL_BUS_WSTRB),
.ARVALID(s_axi_CTRL_BUS_ARVALID),
.ARREADY(s_axi_CTRL_BUS_ARREADY),
.ARADDR(s_axi_CTRL_BUS_ARADDR),
.RVALID(s_axi_CTRL_BUS_RVALID),
.RREADY(s_axi_CTRL_BUS_RREADY),
.RDATA(s_axi_CTRL_BUS_RDATA),
.RRESP(s_axi_CTRL_BUS_RRESP),
.BVALID(s_axi_CTRL_BUS_BVALID),
.BREADY(s_axi_CTRL_BUS_BREADY),
.BRESP(s_axi_CTRL_BUS_BRESP),
.ACLK(ap_clk),
.ARESET(ap_rst_n_inv),
.ACLK_EN(1'b1),
.led_reg(led_reg),
.key_status(key_in),
.key_status_ap_vld(key_status_ap_vld),
.ap_start(ap_start),
.interrupt(interrupt),
.ap_ready(ap_ready),
.ap_done(ap_done),
.ap_idle(ap_idle)
);
always @ (*) begin
if ((ap_start == 1'b1)) begin
key_status_ap_vld = 1'b1;
end else begin
key_status_ap_vld = 1'b0;
end
end
assign ap_done = ap_start;
assign ap_idle = 1'b1;
assign ap_ready = ap_start;
always @ (*) begin
ap_rst_n_inv = ~ap_rst_n;
end
assign led_out = led_reg;
endmodule //my_led_key
#################################################################
`timescale 1ns/1ps
module my_led_key_CTRL_BUS_s_axi
#(parameter
C_S_AXI_ADDR_WIDTH = 6,
C_S_AXI_DATA_WIDTH = 32
)(
input wire ACLK,
input wire ARESET,
input wire ACLK_EN,
input wire [C_S_AXI_ADDR_WIDTH-1:0] AWADDR,
input wire AWVALID,
output wire AWREADY,
input wire [C_S_AXI_DATA_WIDTH-1:0] WDATA,
input wire [C_S_AXI_DATA_WIDTH/8-1:0] WSTRB,
input wire WVALID,
output wire WREADY,
output wire [1:0] BRESP,
output wire BVALID,
input wire BREADY,
input wire [C_S_AXI_ADDR_WIDTH-1:0] ARADDR,
input wire ARVALID,
output wire ARREADY,
output wire [C_S_AXI_DATA_WIDTH-1:0] RDATA,
output wire [1:0] RRESP,
output wire RVALID,
input wire RREADY,
output wire interrupt,
output wire [0:0] led_reg,
input wire [0:0] key_status,
input wire key_status_ap_vld,
output wire ap_start,
input wire ap_done,
input wire ap_ready,
input wire ap_idle
);
//------------------------Address Info-------------------
// 0x00 : Control signals
// bit 0 - ap_start (Read/Write/SC)
// bit 1 - ap_done (Read/COR)
// bit 2 - ap_idle (Read)
// bit 3 - ap_ready (Read)
// bit 7 - auto_restart (Read/Write)
// others - reserved
// 0x04 : Global Interrupt Enable Register
// bit 0 - Global Interrupt Enable (Read/Write)
// others - reserved
// 0x08 : IP Interrupt Enable Register (Read/Write)
// bit 0 - enable ap_done interrupt (Read/Write)
// others - reserved
// 0x0c : IP Interrupt Status Register (Read/TOW)
// bit 0 - ap_done (COR/TOW)
// others - reserved
// 0x10 : Data signal of led_reg
// bit 0 - led_reg[0] (Read/Write)
// others - reserved
// 0x14 : reserved
// 0x20 : Data signal of key_status
// bit 0 - key_status[0] (Read)
// others - reserved
// 0x24 : Control signal of key_status
// bit 0 - key_status_ap_vld (Read/COR)
// others - reserved
// (SC = Self Clear, COR = Clear on Read, TOW = Toggle on Write, COH = Clear on Handshake)
xxxxxxxxxxxxxxxxxx
endmodule