摘要 ------增益相位损伤(Gain-phase impairments,GPIs)会影响 6G 通感一体化 (ISAC) 中的通信和感知功能。我们研究了单输入多输出正交频分复用 ISAC 系统中 GPIs 的影响,并开发了一种基于模型的无监督学习方法(model-based unsupervised
learning approach),以同时
- ( i ) (i) (i) 估计增益相位误差(gain-phase errors)
- 以及 ( i i ) (ii) (ii) 定位感知目标。
所提出的方法基于针对单个目标的最佳最大后验比检验(optimal maximum a-posteriori ratio test)。结果表明,所提出的方法能够有效地估计增益相位误差,并能获得与损伤完全已知时相近的位置估计性能。
关键词------GPIs,正交频分复用,基于模型的学习,无监督学习。
文章目录
-
- [I. INTRODUCTION](#I. INTRODUCTION)
- [II. SYSTEM MODEL](#II. SYSTEM MODEL)
- [III. PROPOSED METHOD](#III. PROPOSED METHOD)
-
- [A. Baseline](#A. Baseline)
- [IV. RESULTS](#IV. RESULTS)
-
- [A. Simulation Parameters](#A. Simulation Parameters)
- [B. Impact of GPIs](#B. Impact of GPIs)
- [C. Sensing Results](#C. Sensing Results)
- [VI. APPENDIX A DERIVATION OF MAPRT](#VI. APPENDIX A DERIVATION OF MAPRT)
I. INTRODUCTION
通感一体化 (ISAC) 被认为是第六代无线系统 (6G) 1 的关键赋能技术,它将感知和通信功能结合在单个设备中,从而为通信系统提供感知能力,同时也提高了无线信道的使用效率和系统性能 2。ISAC 中的信号处理主要由基于模型的算法驱动(model-based algorithms),这些算法提供性能保证(performance guarantees)、可解释性(explainability)和可预测的计算复杂度(predictable computational complexity) 3--7。然而,6G 中预期的更高载波频率以及感知与通信网络的融合增加了硬件损伤的可能性,例如天线畸变(antenna distortions)、相位噪声(phase noise)和采样抖动(sampling jitter) 8, 9。这些硬件损伤导致基于模型的算法出现模型失配,从而降低其性能。
- 深度学习 (DL) 已被成功应用于缓解 ISAC 中的硬件损伤 10--13,但它缺乏可解释性(lack of interpretability)。
- 相比之下,基于模型的机器学习 (model-based machine learning,MB-ML) 通过参数化标准的基于模型的算法(parameterizing standard model-based algorithms),提供了可解释的解决方案(provides interpretable solutions),增强了其对失配模型的适应性(their adaptability to mismatched models),同时提供了性能保证 14。
MB-ML 已被应用于通信 15--18、感知 19--21 和 ISAC 场景 22。硬件损伤缓解方案(例如 20--22)依赖于监督学习 (supervised learning,SL),这涉及获取环境中物体地面真值位置的困难或耗时过程。无监督学习 (Unsupervised learning,UL) 避免了标签数据,并已被用于 23 中的 ISAC 天线间距损伤缓解(inter-antenna spacing impairment),尽管仍需要少量标签数据集来完全补偿损伤。
在本文中,我们在 MB-ML 框架下开发了一种 UL 方法,以联合补偿天线增益相位损伤 (antenna gain-phase impairments,GPIs) 并估计目标位置。作为概念验证,我们专注于基于正交频分复用 (OFDM) 信号执行单目标检测和位置估计的简单单站单输入多输出 (SIMO) 雷达(见图 1)。GPI 缓解是一个重要问题,已有基于模型的 24--26、DL 27, 28 和 MB-ML 解决方案 17, 18。
-
然而,24, 25 至少需要一个处于已知角度的发射机来校准天线阵列,
-
26 假设了信道状态信息 (CSI) 的已知模型,这不适用于我们的情况,因为 CSI 包含待估计的目标位置。
-
在 27 中,仅执行了角度估计,
-
而 28 需要一个处于已知位置的发射机进行校准。
-
此外,27, 28 需要标签数据进行训练。
-
最后,虽然 17, 18 提出了 MB-ML UL 方法来补偿 GPI,但它们考虑的是纯通信系统和没有用户定位的 CSI 估计。
II. SYSTEM MODEL
我们考虑一个单站 SIMO-OFDM ISAC 收发机,配备单天线发射 (TX) 和 N N N 个阵元的接收 (RX) 均匀线阵 (ULA)。RX ULA 的阵元间距为 d R d_{\mathrm{R}} dR。OFDM 信号的符号持续时间为 T s y m = T c p + T T_{\mathrm{sym}} = T_{\mathrm{cp}} + T Tsym=Tcp+T,其中 T c p T_{\mathrm{cp}} Tcp 是循环前缀 (CP), T T T 是基本符号持续时间。具有 S S S 个子载波且子载波间隔为 Δ f = 1 / T \Delta_{\mathrm{f}} = 1/T Δf=1/T 的复基带 OFDM 发射信号为 29, 30
s ( t ) = 1 S ∑ s = 0 S − 1 x s e j 2 π s Δ f t r e c t ( t T s y m ) , (1) s(t) = \frac{1}{\sqrt{S}} \sum_{s=0}^{S-1} x_s e^{j 2 \pi s \Delta_{\mathrm{f}} t} \mathrm{rect} \left( \frac{t}{T_{\mathrm{sym}}} \right), \tag{1} s(t)=S 1s=0∑S−1xsej2πsΔftrect(Tsymt),(1)
其中 x s x_s xs 是第 s s s 个子载波中的复发射符号。考虑到远场中存在一个静止的点目标,第 n n n 个 RX 阵元处的无噪声接收基带信号为 31
z n ( t ) = γ a ( θ ) n s ( t − τ ) (2) z_n(t) = \gamma \\boldsymbol{a}(\\theta)_n s(t - \tau) \tag{2} zn(t)=γa(θ)ns(t−τ)(2)
其中 γ \gamma γ 是复信道增益, τ \tau τ 是目标的总往返时延, θ \theta θ 是到达角 (AOA), a ( θ ) \boldsymbol{a}(\theta) a(θ) 是阵列导向矢量,具有
a ( θ ) n = e − j 2 π n d R sin ( θ ) / λ , n = 0 , ... , N − 1 (3) \\boldsymbol{a}(\\theta)n = e^{-j 2 \pi n d{\mathrm{R}} \sin(\theta) / \lambda}, n = 0, \ldots, N-1 \tag{3} a(θ)n=e−j2πndRsin(θ)/λ,n=0,...,N−1(3)
其中 λ \lambda λ 为载波波长。遵循标准 OFDM 假设,CP 被取为大于最远目标的往返时延,即 T c p ≥ τ T_{\mathrm{cp}} \ge \tau Tcp≥τ。在 t = T c p + l T / S t = T_{\mathrm{cp}} + lT/S t=Tcp+lT/S 时刻对 z n ( t ) z_n(t) zn(t) 进行采样,其中 l = 0 , ... , S − 1 l = 0, \ldots, S-1 l=0,...,S−1(即去除 CP 后),我们获得离散时间信号
z n l = γ S a ( θ ) n ∑ s = 0 S − 1 x s e j 2 π s l S e − j 2 π s Δ f τ , (4) z_nl = \frac{\gamma}{\sqrt{S}} \\boldsymbol{a}(\\theta)n \sum{s=0}^{S-1} x_s e^{j 2 \pi s \frac{l}{S}} e^{-j 2 \pi s \Delta_{\mathrm{f}} \tau}, \tag{4} znl=S γa(θ)ns=0∑S−1xsej2πsSle−j2πsΔfτ,(4)
其中已知的相移 exp ( j 2 π s Δ f T c p ) \exp(j 2 \pi s \Delta_{\mathrm{f}} T_{\mathrm{cp}}) exp(j2πsΔfTcp) 被吸收进 x s x_s xs 中。对 z n l z_nl znl 进行 S S S 点 DFT 得到频域基带信号为
Z n , s = F { { z n l } l = 0 S − 1 } = γ a ( θ ) n x s b ( τ ) s , (5) Z_{n,s} = \mathcal{F} \left\{ \{z_nl\}_{l=0}^{S-1} \right\} = \gamma \\boldsymbol{a}(\\theta)_n x_s \\boldsymbol{b}(\\tau)_s, \tag{5} Zn,s=F{{znl}l=0S−1}=γa(θ)nxsb(τ)s,(5)
其中 b ( τ ) s = exp ( − j 2 π s Δ f τ ) \\boldsymbol{b}(\\tau)s = \exp(-j 2 \pi s \Delta{\mathrm{f}} \tau) b(τ)s=exp(−j2πsΔfτ)。在天线阵元和子载波上进行聚合,(5) 中的信号可以表示为
Z = γ a ( θ ) ( b ( τ ) ⊙ x ) ⊤ ∈ C N × S , (6) \boldsymbol{Z} = \gamma \boldsymbol{a}(\theta) (\boldsymbol{b}(\tau) \odot \boldsymbol{x})^{\top} \in \mathbb{C}^{N \times S}, \tag{6} Z=γa(θ)(b(τ)⊙x)⊤∈CN×S,(6)
其中 x = x 0 ⋯ x S − 1 ⊤ \boldsymbol{x} = x_0 \\cdots x_{S-1}^{\top} x=x0⋯xS−1⊤ 是发射符号矢量, ⊙ \odot ⊙ 表示哈达玛积。
无 GPI 的观测: 在接收端添加噪声并考虑环境中随机存在的目标,得到最终模型 1 ^1 1
Y = t γ a ( θ ) ( b ( τ ) ⊙ x ) ⊤ + W , (7) \boldsymbol{Y} = t \gamma \boldsymbol{a}(\theta) (\boldsymbol{b}(\tau) \odot \boldsymbol{x})^{\top} + \boldsymbol{W}, \tag{7} Y=tγa(θ)(b(τ)⊙x)⊤+W,(7)
其中 t ∈ { 0 , 1 } t \in \{0, 1\} t∈{0,1} 表示目标的缺失或存在, W \boldsymbol{W} W 表示加性高斯白噪声 (AWGN),服从 v e c ( W ) ∼ C N ( 0 , N 0 I ) \mathrm{vec}(\boldsymbol{W}) \sim \mathcal{CN}(\boldsymbol{0}, N_0 \boldsymbol{I}) vec(W)∼CN(0,N0I),其中 v e c ( ⋅ ) \mathrm{vec}(\cdot) vec(⋅) 为矢量化操作, 0 \boldsymbol{0} 0 为全零矢量, I \boldsymbol{I} I 为单位矩阵。感知接收机的目标是基于 Y \boldsymbol{Y} Y 检测目标的存在并估计其位置。
含 GPI 的观测(Observation with GPI): 当 ULA 阵元受到 GPIs 影响时,ULA 的实际导向矢量为 a ( θ ; κ ) = κ ⊙ a ( θ ) \boldsymbol{a}(\theta; \boldsymbol{\kappa}) = \boldsymbol{\kappa} \odot \boldsymbol{a}(\theta) a(θ;κ)=κ⊙a(θ),其中 κ ∈ C N \boldsymbol{\kappa} \in \mathbb{C}^N κ∈CN 是包含所有天线阵元 GPIs 的矢量。我们考虑 ∥ κ ∥ 2 = N \|\boldsymbol{\kappa}\|^2 = N ∥κ∥2=N,以便在存在损伤的情况下发射机能量得以保持,即 ∥ a ( θ ; κ ) ∥ 2 = ∥ a ( θ ) ∥ 2 = N \|\boldsymbol{a}(\theta; \boldsymbol{\kappa})\|^2 = \|\boldsymbol{a}(\theta)\|^2 = N ∥a(θ;κ)∥2=∥a(θ)∥2=N。(7) 中的模型在 GPIs 下变为
Y = t γ ( a ( θ ; κ ) ) ( b ( τ ) ⊙ x ) ⊤ + W . (8) \boldsymbol{Y} = t \gamma (\boldsymbol{a}(\theta; \boldsymbol{\kappa})) (\boldsymbol{b}(\tau) \odot \boldsymbol{x})^{\top} + \boldsymbol{W}. \tag{8} Y=tγ(a(θ;κ))(b(τ)⊙x)⊤+W.(8)
接收机现在的目标是在未知 κ \boldsymbol{\kappa} κ 的情况下进行操作。
- 1 ^1 1在所考虑的 SIMO 模型下,通信接收机不受 GPI 的影响。由于这个原因以及篇幅限制,本文未评估通信性能。
- ∥ a ( θ ; κ ) ∥ 2 = ∑ n = 0 N − 1 ∣ κ n ⋅ a ( θ ) n ∣ 2 = ∑ n = 0 N − 1 ∣ κ n ∣ 2 ⋅ ∣ a ( θ ) n ∣ 2 ⏟ 1 = ∑ n = 0 N − 1 ∣ κ n ∣ 2 = ∥ κ ∥ 2 \begin{aligned} \|\boldsymbol{a}(\theta; \boldsymbol{\kappa})\|^2 &= \sum_{n=0}^{N-1} \left| \\boldsymbol{\\kappa}_n \cdot \\boldsymbol{a}(\\theta)n \right|^2 \\ &= \sum{n=0}^{N-1} |\\boldsymbol{\\kappa}n|^2 \cdot \underbrace{|\\boldsymbol{a}(\\theta)n|^2}{1} \\ &= \sum{n=0}^{N-1} |\\boldsymbol{\\kappa}_n|^2 \\ &= \|\boldsymbol{\kappa}\|^2 \end{aligned} ∥a(θ;κ)∥2=n=0∑N−1∣κn⋅a(θ)n∣2=n=0∑N−1∣κn∣2⋅1 ∣a(θ)n∣2=n=0∑N−1∣κn∣2=∥κ∥2
III. PROPOSED METHOD
在下文中,我们将详细介绍用于执行目标检测和位置估计的考虑基准,以及所提出的用于补偿 GPIs 的无监督 MB-ML 方法。
A. Baseline
我们假设基准方法在固定的 κ \boldsymbol{\kappa} κ 下运行,该值可能与真实的 GPIs 不一致。为了检测目标是否存在并估计其位置,我们采用最大后验比检验 (maximum a-posteriori ratio test,MAPRT) 检测器 32,它将广义似然比检验检测器(the generalized likelihood ratio test detector) 33 推广到具有随机参数的情况,因此可以考虑关于 γ \gamma γ、 θ \theta θ 和 τ \tau τ 的先验信息。我们假设复信道增益服从正态分布,即 γ ∼ C N ( 0 , σ γ 2 ) \gamma \sim \mathcal{CN}(0, \sigma_\gamma^2) γ∼CN(0,σγ2),并且目标角度和距离被限制在一个先验已知的区域内,即 θ ∼ U θ min , θ max \theta \sim \mathcal{U}\\theta_{\\min}, \\theta_{\\max} θ∼Uθmin,θmax, τ ∼ U τ min , τ max \tau \sim \mathcal{U}\\tau_{\\min}, \\tau_{\\max} τ∼Uτmin,τmax。此外,我们假设 p ( t = 0 ) = p ( t = 1 ) = 1 / 2 p(t=0)=p(t=1)=1/2 p(t=0)=p(t=1)=1/2。对于固定的 κ \boldsymbol{\kappa} κ,MAPRT 得到以下最佳检验:
max θ ∈ O τ ∈ T { ∣ a H ( θ ; κ ) Y ( b ( τ ) ⊙ x ) ∗ ∣ 2 } ≷ η , (9) \max_{\substack{\theta \in \mathcal{O} \\ \tau \in \mathcal{T}}} \left\{ |\boldsymbol{a}^{\mathrm{H}}(\theta; \boldsymbol{\kappa}) \boldsymbol{Y} (\boldsymbol{b}(\tau) \odot \boldsymbol{x})^*|^2 \right\} \gtrless \eta, \tag{9} θ∈Oτ∈Tmax{∣aH(θ;κ)Y(b(τ)⊙x)∗∣2}≷η,(9)
其中 O = θ min , θ max \mathcal{O} = \\theta_{\\min}, \\theta_{\\max} O=θmin,θmax, T = τ min , τ max \mathcal{T} = \\tau_{\\min}, \\tau_{\\max} T=τmin,τmax, ( ⋅ ) H (\cdot)^{\mathrm{H}} (⋅)H 表示共轭转置(conjugate transpose)运算, ( ⋅ ) ∗ (\cdot)^* (⋅)∗ 表示共轭运算, ∣ ⋅ ∣ |\cdot| ∣⋅∣ 表示绝对值, η \eta η 是控制检测概率和虚警概率的阈值。关于 MAPRT 推导的详细信息可以在附录 A 中找到。
p ( t = 0 ) = p ( t = 1 ) = 1 / 2 p(t=0)=p(t=1)=1/2 p(t=0)=p(t=1)=1/2 表示系统假设目标不存在( t = 0 t=0 t=0)和目标存在( t = 1 t=1 t=1)的先验概率是相等的。
目标的角度和时延获取如下:
( θ ^ , τ ^ ) = arg max θ ∈ O τ ∈ T { ∣ a H ( θ ; κ ) Y ( b ( τ ) ⊙ x ) ∗ ∣ 2 } . (10) (\hat{\theta}, \hat{\tau}) = \arg \max_{\substack{\theta \in \mathcal{O} \\ \tau \in \mathcal{T}}} \left\{ |\boldsymbol{a}^{\mathrm{H}}(\theta; \boldsymbol{\kappa}) \boldsymbol{Y} (\boldsymbol{b}(\tau) \odot \boldsymbol{x})^*|^2 \right\}. \tag{10} (θ^,τ^)=argθ∈Oτ∈Tmax{∣aH(θ;κ)Y(b(τ)⊙x)∗∣2}.(10)
当假设的 κ \boldsymbol{\kappa} κ 与实际 GPIs 匹配时,(9)、(10) 中的基准方法是最佳的,并且它代表了性能的下界,正如将在第四节中展示的那样。
B. 提出的 UL MB-ML 方法
我们将我们的方法建立在第 III-A 节的基准之上。具体来说,我们计算 角度-时延图 为
M ( κ ^ ) = ∣ Φ θ ( κ ^ ) H Y ( Φ τ ⊙ x 1 ⊤ ) ∗ ∣ 2 , (11) \boldsymbol{M}(\hat{\boldsymbol{\kappa}}) = |\boldsymbol{\Phi}{\theta}(\hat{\boldsymbol{\kappa}})^{\mathrm{H}} \boldsymbol{Y} (\boldsymbol{\Phi}{\tau} \odot \boldsymbol{x} \mathbf{1}^{\top})^*|^2, \tag{11} M(κ^)=∣Φθ(κ^)HY(Φτ⊙x1⊤)∗∣2,(11)
其中 κ ^ \hat{\boldsymbol{\kappa}} κ^ 是 GPIs 的估计值, 1 \mathbf{1} 1 是全一矢量,并且
Φ θ ( κ ^ ) = a ( θ 1 ; κ \^ ) a ( θ 2 ; κ \^ ) ⋯ a ( θ N θ ; κ \^ ) (12) \boldsymbol{\Phi}_{\theta}(\hat{\boldsymbol{\kappa}}) = \\boldsymbol{a}(\\theta_1; \\hat{\\boldsymbol{\\kappa}}) \\ \\boldsymbol{a}(\\theta_2; \\hat{\\boldsymbol{\\kappa}}) \\ \\cdots \\ \\boldsymbol{a}(\\theta_{N_{\\theta}}; \\hat{\\boldsymbol{\\kappa}}) \tag{12} Φθ(κ^)=a(θ1;κ\^) a(θ2;κ\^) ⋯ a(θNθ;κ\^)(12)
Φ τ = b ( τ 1 ) b ( τ 2 ) ⋯ b ( τ N τ ) . (13) \boldsymbol{\Phi}_{\tau} = \\boldsymbol{b}(\\tau_1) \\ \\boldsymbol{b}(\\tau_2) \\ \\cdots \\ \\boldsymbol{b}(\\tau_{N_{\\tau}}). \tag{13} Φτ=b(τ1) b(τ2) ⋯ b(τNτ).(13)
我们在均匀采样的二维网格上评估角度-时延图,其中 N θ N_{\theta} Nθ 和 N τ N_{\tau} Nτ 分别为角度和时延点的数量。根据角度-时延图,我们提出了两种不同的无监督损失函数(two different unsupervised loss functions)来学习 GPIs。
1) 最大化角度-时延图的最大值:
J ( κ ^ ) = E t , γ , θ , τ , x , W − max i , j \[ M ( κ \^ ) i , j ] , (14) \mathcal{J}(\hat{\boldsymbol{\kappa}}) = \mathbb{E}{t, \gamma, \theta, \tau, \boldsymbol{x}, \boldsymbol{W}} \left - \\max_{i,j} \[\\boldsymbol{M}(\\hat{\\boldsymbol{\\kappa}}){i,j} \right], \tag{14} J(κ^)=Et,γ,θ,τ,x,W−i,jmax\[M(κ\^)i,j],(14)
其中期望是针对 (8) 中 t , γ , θ , τ , x t, \gamma, \theta, \tau, \boldsymbol{x} t,γ,θ,τ,x 和 W \boldsymbol{W} W 的随机实现获取的。未知的 GPIs 会降低角度-时延图的幅度,因为角度-时延图的计算涉及 ∣ a H ( θ ; κ ^ ) a ( θ ; κ ) ∣ 2 |\boldsymbol{a}^{\mathrm{H}}(\theta; \hat{\boldsymbol{\kappa}})\boldsymbol{a}(\theta; \boldsymbol{\kappa})|^2 ∣aH(θ;κ^)a(θ;κ)∣2,该式仅当 κ ^ = κ \hat{\boldsymbol{\kappa}} = \boldsymbol{\kappa} κ^=κ 时最大化。因此,我们期望通过最小化 (14),我们提出的算法能够收敛到真实的损伤 κ \boldsymbol{\kappa} κ。关于损伤如何影响角度-时延图的详细信息将在第四节中展示。
- 优化习惯:在机器学习中,我们通常定义一个损失函数 (Loss Function) 并试图最小化 (Minimize) 它。
- 转换:最大化一个正数 X X X,等同于最小化 − X -X −X。
- 公式 (14) 实际上包含了 θ \theta θ 和 τ \tau τ。公式 (14) 是: J ( κ ^ ) = E − max i , j \[ M ( κ \^ ) i , j ] \mathcal{J}(\hat{\boldsymbol{\kappa}}) = \mathbb{E} \left - \\max_{i,j} \[\\boldsymbol{M}(\\hat{\\boldsymbol{\\kappa}}){i,j} \right] J(κ^)=E−i,jmax\[M(κ\^)i,j]请注意这里的 M ( κ ^ ) \boldsymbol{M}(\hat{\boldsymbol{\kappa}}) M(κ^) 是一个二维矩阵(Angle-Delay Map)。矩阵的每一个元素 M i , j \\boldsymbol{M}{i,j} Mi,j 都对应着一个特定的角度 θ i \theta_i θi 和 时延 τ j \tau_j τj。当我们执行 max i , j \max_{i,j} maxi,j 操作时,我们实际上是在问:"在所有的 ( θ , τ ) (\theta, \tau) (θ,τ) 网格点中,哪一组参数让响应最大?"这个最大值出现的位置 ( i ∗ , j ∗ ) (i^*, j^*) (i∗,j∗),就是我们在公式 (10) 中显式写出的估计值 ( θ ^ , τ ^ ) (\hat{\theta}, \hat{\tau}) (θ^,τ^)。所以,公式 (14) 可以被重写为: J ( κ ^ ) ≈ − M ( κ ^ , θ ^ , τ ^ ) ⏟ 在最佳位置上的峰值 \mathcal{J}(\hat{\boldsymbol{\kappa}}) \approx - \underbrace{\boldsymbol{M}(\hat{\boldsymbol{\kappa}}, \hat{\theta}, \hat{\tau})}_{\text{在最佳位置上的峰值}} J(κ^)≈−在最佳位置上的峰值 M(κ^,θ^,τ^)
2) 最小化接收观测信号的误差:
J ( κ ^ ) = E t , γ , θ , τ , x , W ∥ Y − Y \~ ( κ \^ ) ∥ F , (15) \mathcal{J}(\hat{\boldsymbol{\kappa}}) = \mathbb{E}_{t, \gamma, \theta, \tau, \boldsymbol{x}, \boldsymbol{W}} \\\|\\boldsymbol{Y} - \\tilde{\\boldsymbol{Y}}(\\hat{\\boldsymbol{\\kappa}})\\\|_F , \tag{15} J(κ^)=Et,γ,θ,τ,x,W∥Y−Y\~(κ\^)∥F,(15)
其中 ∥ ⋅ ∥ F \|\cdot\|_F ∥⋅∥F 表示 Frobenius 范数,并且
Y ~ ( κ ^ ) = γ ^ a ( θ ^ ; κ ^ ) ( b ( τ ^ ) ⊙ x ) ⊤ (16) \tilde{\boldsymbol{Y}}(\hat{\boldsymbol{\kappa}}) = \hat{\gamma} \boldsymbol{a}(\hat{\theta}; \hat{\boldsymbol{\kappa}}) (\boldsymbol{b}(\hat{\tau}) \odot \boldsymbol{x})^{\top} \tag{16} Y~(κ^)=γ^a(θ^;κ^)(b(τ^)⊙x)⊤(16)
是根据信道增益、角度和目标时延估计值重构的观测信号。关于 γ ^ \hat{\gamma} γ^ 的表达式在附录 A 中推导。 2 ^2 2 公式 (15) 背后的动机是观测信号 Y \boldsymbol{Y} Y 受到真实 GPIs κ \boldsymbol{\kappa} κ 的影响,而我们在 (16) 中使用估计的损伤 κ ^ \hat{\boldsymbol{\kappa}} κ^ 来重构观测信号 Y ~ \tilde{\boldsymbol{Y}} Y~。我们的假设是,通过最小化接收观测信号与重构信号之间的差异,学习到的损伤会收敛到真实损伤。
尽管 (10) 中 θ ^ \hat{\theta} θ^ 和 τ ^ \hat{\tau} τ^ 的计算涉及不可微操作,但可以计算 (15) 中损失相对于 κ ^ \hat{\boldsymbol{\kappa}} κ^ 的梯度,这一点在 17 中的类似方法中已经被观察到。
2 ^2 2 γ ^ \hat{\gamma} γ^ 的估计假设已知 N 0 / σ γ 2 N_0/\sigma_\gamma^2 N0/σγ2,该值与信噪比 (SNR) 有关。在本文中,我们假设完全已知 N 0 / σ γ 2 N_0/\sigma_\gamma^2 N0/σγ2,但关于 SNR 估计方法,我们建议读者参考 34, 35。
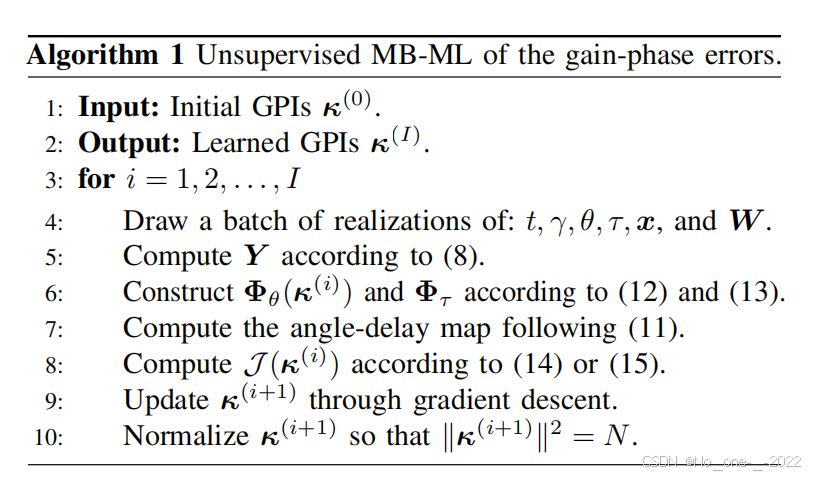
在算法 1 中,我们总结了所提出的用于学习 GPIs 的无监督 MB-ML 算法。随机变量的分布在表 I 中突出显示。我们使用理想的增益相位系数初始化算法,即 κ ( 0 ) = 1 \boldsymbol{\kappa}^{(0)} = \mathbf{1} κ(0)=1。一旦我们根据算法 1 学习到了增益相位误差,我们就执行与 (9)、(10) 中的基准相同的操作进行推理,其中导向矢量 a H ( θ ; κ ) \boldsymbol{a}^{\mathrm{H}}(\theta; \boldsymbol{\kappa}) aH(θ;κ) 被替换为带有学习到的损伤的导向矢量 a H ( θ ; κ ( I ) ) \boldsymbol{a}^{\mathrm{H}}(\theta; \boldsymbol{\kappa}^{(I)}) aH(θ;κ(I))。
IV. RESULTS
在本节中,我们将详细介绍所考虑的仿真参数,并展示感知结果 3 ^3 3,以评估所提出的学习方法的有效性。
A. Simulation Parameters
表 I 列出了仿真参数,其中我们考虑通信符号 x s \\boldsymbol{x}s xs 是从正交相移键控 (QPSK) 星座图中随机抽取的,且 ∠ ( ⋅ ) \angle(\cdot) ∠(⋅) 表示复数值的相位。信噪比定义为 S N R = E ∥ γ ( a ( θ ) ( b ( τ ) ⊙ x ) ⊤ ) ∥ F 2 / N 0 = σ γ 2 N S / N 0 \mathrm{SNR} = \mathbb{E}\\\|\\gamma(\\boldsymbol{a}(\\theta)(\\boldsymbol{b}(\\tau) \\odot \\boldsymbol{x})\^{\\top})\\\|_F\^2/N_0 = \sigma\gamma^2 N S/N_0 SNR=E∥γ(a(θ)(b(τ)⊙x)⊤)∥F2/N0=σγ2NS/N0。GPIs 的幅度和相位是从 36 中详述的分布中抽取的。为了评估 (9) 和 (10) 中需要最大化的目标函数,我们对角度和时延执行均匀的二维网格搜索,类似于 (11)。在训练过程中,我们利用了 Adam 优化器 37。
系统最终用于检测目标的"有效信噪比"就是: Total SNR = σ γ 2 N 0 ⏟ 单点SNR × N ⏟ 空间增益 × S ⏟ 频率增益 = σ γ 2 N S N 0 \text{Total SNR} = \underbrace{\frac{\sigma_\gamma^2}{N_0}}{\text{单点SNR}} \times \underbrace{N}{\text{空间增益}} \times \underbrace{S}{\text{频率增益}} = \frac{\sigma\gamma^2 N S}{N_0} Total SNR=单点SNR N0σγ2×空间增益 N×频率增益 S=N0σγ2NS
这么做是因为,在做目标检测(Detection)时,决定检测概率 ( P D P_D PD) 和虚警概率 ( P F A P_{FA} PFA) 的核心指标通常是 "总信号能量与噪声功率谱密度的比值" ( E / N 0 E/N_0 E/N0)。
B. Impact of GPIs
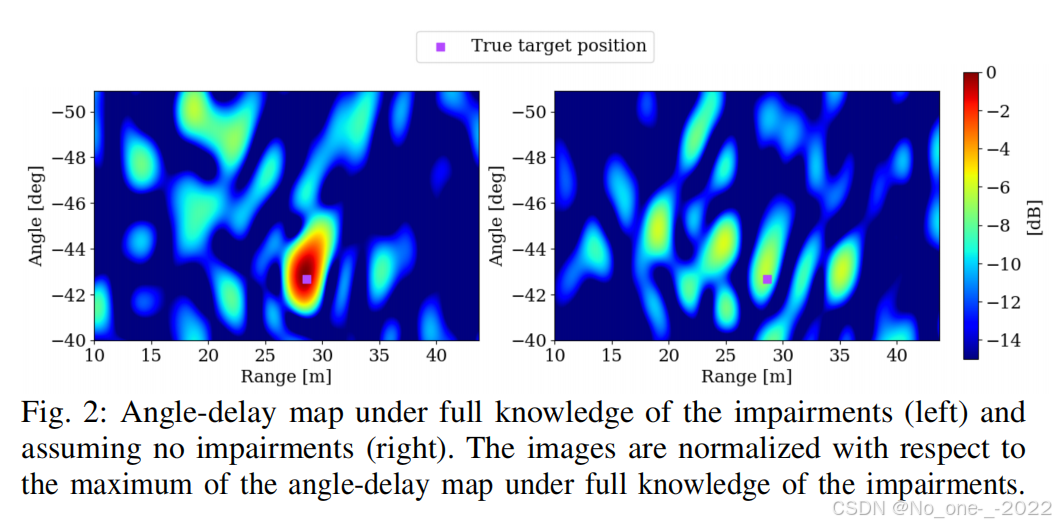
为了理解忽略 GPIs 如何影响感知性能,我们在图 2 中绘制了在完全已知 GPIs(即 κ ^ = κ \hat{\boldsymbol{\kappa}} = \boldsymbol{\kappa} κ^=κ,左图)和假设无损伤(即 κ ^ = 1 \hat{\boldsymbol{\kappa}} = \mathbf{1} κ^=1,右图)情况下的角度-时延图。(8) 中的信道模型包含了一个损伤实现 κ ≠ 1 \boldsymbol{\kappa} \neq \mathbf{1} κ=1。可以看出,忽略 GPIs 会改变角度-时延图最大值的位置,从而影响 (10) 中的检验。此外,图 2 中的角度-时延图是相对于完全已知 GPIs 时的角度-时延图的最大值(左图)进行归一化的,这意味着与完全已知 GPIs 相比,忽略 GPIs 还会降低角度-时延图的最大幅度(正如第 III-B 节中所述)。
C. Sensing Results
在图 3 中,我们展示了测试感知结果,其中我们比较了:
- ( i ) (i) (i) 当 κ \boldsymbol{\kappa} κ 与真实损伤匹配时第 III-A 节的基准方法(蓝色),
- ( i i ) (ii) (ii) κ = 1 \boldsymbol{\kappa} = \mathbf{1} κ=1 时的基准方法(黑色),
- 以及 ( i i i ) (iii) (iii) 第 III-B 节中提出的方法,该方法使用学习到的损伤 κ = κ ( I ) \boldsymbol{\kappa} = \boldsymbol{\kappa}^{(I)} κ=κ(I),
- 分别使用 (14) 中的损失(绿色)和 (15) 中的损失(红色)。
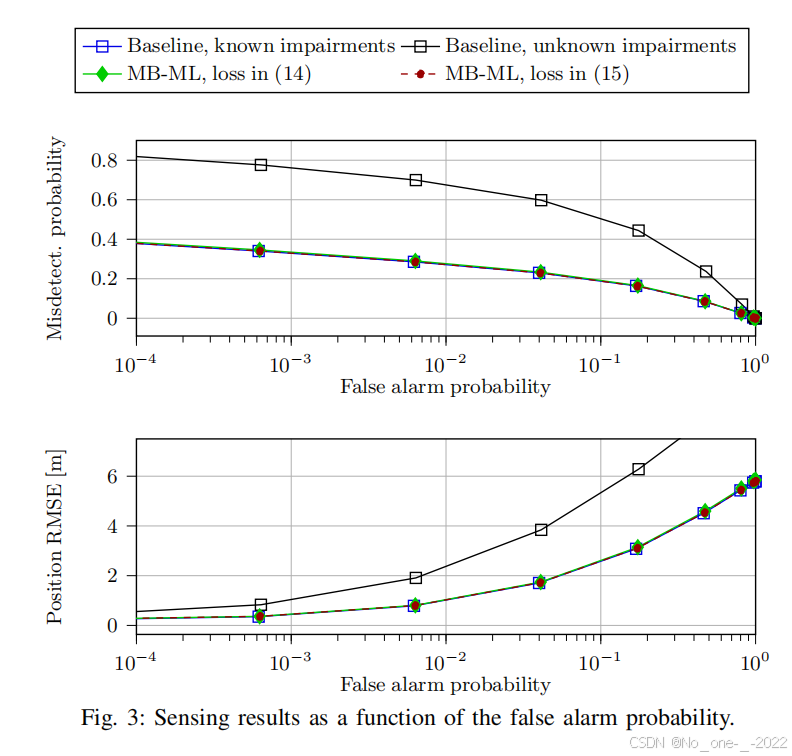
图 3 中的结果是对 100 次 GPIs 实现取平均得到的。图 3 的结果表明,所提出的无监督学习方法可以收敛到与 ULA 真实损伤相似的 GPI 矢量,并获得与损伤完全已知时相似的性能。这证实了第 III-B 节关于所提出的损失函数有效性的假设(This confirms the hypothesis of Sec. III-B about
the effectiveness of the proposed loss functions.)。
此外,使用损失 (14) 和 (15) 的算法性能非常相似,这可以通过附录 A 的推导来解释。(15) 中的损失类似于 (20) 中需要最小化的目标,而 (14) 中的损失类似于 (25)。(20) 和 (25) 均源自 (18) 中相同的 MAPRT 目标。图 3 的结果表明,最小化 (14) 或 (15) 是等效的。(14) 的优势在于它不需要 SNR 的知识,而 (15) 可以更容易地推广到多目标情况,并嵌入到诸如正交匹配追踪算法 38 等迭代算法中。
MLE (最大似然估计) 是 MAP (最大后验概率估计) 的一种特殊形式。 \textbf{ MLE (最大似然估计) 是 MAP (最大后验概率估计) 的一种特殊形式。} MLE (最大似然估计) 是 MAP (最大后验概率估计) 的一种特殊形式。
两者的核心公式对比:MAP (最大后验):我们想最大化后验概率 p ( θ ∣ Y ) p(\theta | \boldsymbol{Y}) p(θ∣Y)。根据贝叶斯公式,去掉分母常数后,目标是: θ ^ MAP = arg max θ ( p ( Y ∣ θ ) ⏟ 似然 (Likelihood) ⋅ p ( θ ) ⏟ 先验 (Prior) ) \hat{\theta}{\text{MAP}} = \arg \max{\theta} \left( \underbrace{p(\boldsymbol{Y} | \theta)}{\text{似然 (Likelihood)}} \cdot \underbrace{p(\theta)}{\text{先验 (Prior)}} \right) θ^MAP=argθmax 似然 (Likelihood) p(Y∣θ)⋅先验 (Prior) p(θ) MLE (最大似然):我们要最大化观测数据出现的概率: θ ^ MLE = arg max θ p ( Y ∣ θ ) ⏟ 似然 (Likelihood) \hat{\theta}{\text{MLE}} = \arg \max{\theta} \underbrace{p(\boldsymbol{Y} | \theta)}{\text{似然 (Likelihood)}} θ^MLE=argθmax似然 (Likelihood) p(Y∣θ)连接两者的桥梁:如果你假设先验概率 p ( θ ) p(\theta) p(θ) 是一个常数 (Constant)(即均匀分布, θ \theta θ 取任何值的概率都一样): p ( θ ) = C p(\theta) = C p(θ)=C那么 MAP 的公式就变成了: θ ^ MAP = arg max θ ( p ( Y ∣ θ ) ⋅ C ) \hat{\theta}{\text{MAP}} = \arg \max_{\theta} \left( p(\boldsymbol{Y} | \theta) \cdot C \right) θ^MAP=argθmax(p(Y∣θ)⋅C)因为 C C C 是常数,不影响求最大值的位置,所以它等价于: arg max θ p ( Y ∣ θ ) = θ ^ MLE \arg \max_{\theta} p(\boldsymbol{Y} | \theta) = \hat{\theta}_{\text{MLE}} argθmaxp(Y∣θ)=θ^MLE
VI. APPENDIX A DERIVATION OF MAPRT
本附录详细介绍了第 III-A 节中用于单目标检测和位置估计的 MAPRT 的推导。由于远场中的目标是随机存在的,我们可以将目标检测问题表述为二元假设检验问题:
H 0 : Y = N H 1 : Y = γ M ( θ , τ ) + N , (17) \begin{aligned} \mathcal{H}_0 &: \boldsymbol{Y} = \boldsymbol{N} \\ \mathcal{H}_1 &: \boldsymbol{Y} = \gamma \boldsymbol{M}(\theta, \tau) + \boldsymbol{N}, \end{aligned} \tag{17} H0H1:Y=N:Y=γM(θ,τ)+N,(17)
其中 M ( θ , τ ) = a ( θ ; κ ) ( b ( τ ) ⊙ x ) ⊤ \boldsymbol{M}(\theta, \tau) = \boldsymbol{a}(\theta; \boldsymbol{\kappa})(\boldsymbol{b}(\tau) \odot \boldsymbol{x})^{\top} M(θ,τ)=a(θ;κ)(b(τ)⊙x)⊤。
注意,在所考虑的单站设置中,发射通信符号 x \boldsymbol{x} x 对于感知接收机是已知的。考虑到 γ \gamma γ 是一个随机未知量,MAPRT 为
L ( Y ) = max γ , θ , τ p ( γ , θ , τ , H 1 ∣ Y ) p ( H 0 ∣ Y ) ≷ H 1 H 0 η . (18) \mathcal{L}(\boldsymbol{Y}) = \frac{\max_{\gamma, \theta, \tau} p(\gamma, \theta, \tau, \mathcal{H}_1 | \boldsymbol{Y})}{p(\mathcal{H}_0 | \boldsymbol{Y})} \underset{\mathcal{H}_0}{\overset{\mathcal{H}_1}{\gtrless}} \eta. \tag{18} L(Y)=p(H0∣Y)maxγ,θ,τp(γ,θ,τ,H1∣Y)H0≷H1η.(18)
将贝叶斯定理应用于 (18) 得到
L ( Y ) = max γ , θ , τ p ( Y ∣ γ , θ , τ , H 1 ) p ( γ ) p ( θ ) p ( τ ) p ( H 1 ) p ( Y ∣ H 0 ) p ( H 0 ) ≷ H 1 H 0 η ~ . (19) \mathcal{L}(\boldsymbol{Y}) = \frac{\max_{\gamma, \theta, \tau} p(\boldsymbol{Y} | \gamma, \theta, \tau, \mathcal{H}_1) p(\gamma) p(\theta) p(\tau) p(\mathcal{H}_1)}{p(\boldsymbol{Y} | \mathcal{H}_0) p(\mathcal{H}_0)} \underset{\mathcal{H}_0}{\overset{\mathcal{H}_1}{\gtrless}} \tilde{\eta}. \tag{19} L(Y)=p(Y∣H0)p(H0)maxγ,θ,τp(Y∣γ,θ,τ,H1)p(γ)p(θ)p(τ)p(H1)H0≷H1η~.(19)
- P ( A ∣ B ) = P ( B ∣ A ) P ( A ) P ( B ) P(A|B) = \frac{P(B|A)P(A)}{P(B)} P(A∣B)=P(B)P(B∣A)P(A)
- L ( Y ) = "有目标"这一假设在最合理参数下的最大可能性 "纯噪声(没目标)"这一假设的可能性 \mathcal{L}(\boldsymbol{Y}) = \frac{\text{"有目标"这一假设在最合理参数下的最大可能性}}{\text{"纯噪声(没目标)"这一假设的可能性}} L(Y)="纯噪声(没目标)"这一假设的可能性"有目标"这一假设在最合理参数下的最大可能性
假设 p ( H 0 ) = p ( H 1 ) = 1 / 2 p(\mathcal{H}_0) = p(\mathcal{H}1) = 1/2 p(H0)=p(H1)=1/2, γ ∼ C N ( 0 , σ γ 2 ) \gamma \sim \mathcal{CN}(0, \sigma\gamma^2) γ∼CN(0,σγ2), θ ∼ U ( θ min , θ max ) \theta \sim \mathcal{U}(\\theta_{\\min}, \\theta_{\\max}) θ∼U(θmin,θmax), τ ∼ U ( τ min , τ max ) \tau \sim \mathcal{U}(\\tau_{\\min}, \\tau_{\\max}) τ∼U(τmin,τmax) 并在 (19) 中取对数,我们得到 4 ^4 4
L log ( Y ) = ∥ Y ∥ F 2 N 0 − min γ θ ∈ O τ ∈ T { ∥ Y − γ M ∥ F 2 N 0 + ∣ γ ∣ 2 σ γ 2 } ≷ H 1 H 0 η ˉ , (20) \mathcal{L}_{\log}(\boldsymbol{Y}) = \frac{\|\boldsymbol{Y}\|F^2}{N_0} - \min{\substack{\gamma \\ \theta \in \mathcal{O} \\ \tau \in \mathcal{T}}} \left\{ \frac{\|\boldsymbol{Y} - \gamma \boldsymbol{M}\|F^2}{N_0} + \frac{|\gamma|^2}{\sigma\gamma^2} \right\} \underset{\mathcal{H}_0}{\overset{\mathcal{H}_1}{\gtrless}} \bar{\eta}, \tag{20} Llog(Y)=N0∥Y∥F2−γθ∈Oτ∈Tmin{N0∥Y−γM∥F2+σγ2∣γ∣2}H0≷H1ηˉ,(20)
其中 L log ( Y ) = log ( L ( Y ) ) \mathcal{L}{\log}(\boldsymbol{Y}) = \log(\mathcal{L}(\boldsymbol{Y})) Llog(Y)=log(L(Y)) 且 η ˉ = η ~ + log ( π σ γ 2 ) + log ( θ max − θ min ) + log ( τ max − τ min ) \bar{\eta} = \tilde{\eta} + \log(\pi \sigma\gamma^2) + \log(\theta_{\max} - \theta_{\min}) + \log(\tau_{\max} - \tau_{\min}) ηˉ=η~+log(πσγ2)+log(θmax−θmin)+log(τmax−τmin)。在 (20) 中给定 ( θ , τ ) (\theta, \tau) (θ,τ) 的最佳 γ \gamma γ 为
γ ^ = v e c ( M ) H v e c ( Y ) ∥ M ∥ F 2 + N 0 / σ γ 2 . (21) \hat{\gamma} = \frac{\mathrm{vec}(\boldsymbol{M})^{\mathrm{H}}\mathrm{vec}(\boldsymbol{Y})}{\|\boldsymbol{M}\|F^2 + N_0/\sigma\gamma^2}. \tag{21} γ^=∥M∥F2+N0/σγ2vec(M)Hvec(Y).(21)
处理 (20) 中的表达式并代入 (21) 得到
L log ( Y ) = max θ ∈ O τ ∈ T { ∣ v e c ( M ) H v e c ( Y ) ∣ 2 ∥ M ∥ F 2 + N 0 / σ γ 2 } ≷ H 1 H 0 η ˉ . (22) \mathcal{L}{\log}(\boldsymbol{Y}) = \max{\substack{\theta \in \mathcal{O} \\ \tau \in \mathcal{T}}} \left\{ \frac{|\mathrm{vec}(\boldsymbol{M})^{\mathrm{H}}\mathrm{vec}(\boldsymbol{Y})|^2}{\|\boldsymbol{M}\|F^2 + N_0/\sigma\gamma^2} \right\} \underset{\mathcal{H}_0}{\overset{\mathcal{H}_1}{\gtrless}} \bar{\eta}. \tag{22} Llog(Y)=θ∈Oτ∈Tmax{∥M∥F2+N0/σγ2∣vec(M)Hvec(Y)∣2}H0≷H1ηˉ.(22)
给定 M ( θ , τ ) \boldsymbol{M}(\theta, \tau) M(θ,τ) 的定义,我们有
∥ M ∥ F 2 = N ∥ x ∥ 2 2 (23) \|\boldsymbol{M}\|_F^2 = N \|\boldsymbol{x}\|_2^2 \tag{23} ∥M∥F2=N∥x∥22(23)
∣ v e c ( M ) H v e c ( Y ) ∣ 2 = ∣ a H ( θ ; κ ) Y ( b ( τ ) ⊙ x ) ∗ ∣ 2 . (24) |\mathrm{vec}(\boldsymbol{M})^{\mathrm{H}}\mathrm{vec}(\boldsymbol{Y})|^2 = |\boldsymbol{a}^{\mathrm{H}}(\theta; \boldsymbol{\kappa})\boldsymbol{Y}(\boldsymbol{b}(\tau) \odot \boldsymbol{x})^*|^2. \tag{24} ∣vec(M)Hvec(Y)∣2=∣aH(θ;κ)Y(b(τ)⊙x)∗∣2.(24)
将 (23) 和 (24) 代入 (22) 得到
L log ( Y ) = max θ ∈ O τ ∈ T { ∣ a H ( θ ; κ ) Y ( b ( τ ) ⊙ x ) ∗ ∣ 2 } ≷ H 1 H 0 η , (25) \mathcal{L}{\log}(\boldsymbol{Y}) = \max{\substack{\theta \in \mathcal{O} \\ \tau \in \mathcal{T}}} \left\{ |\boldsymbol{a}^{\mathrm{H}}(\theta; \boldsymbol{\kappa})\boldsymbol{Y}(\boldsymbol{b}(\tau) \odot \boldsymbol{x})^*|^2 \right\} \underset{\mathcal{H}_0}{\overset{\mathcal{H}_1}{\gtrless}} \eta, \tag{25} Llog(Y)=θ∈Oτ∈Tmax{∣aH(θ;κ)Y(b(τ)⊙x)∗∣2}H0≷H1η,(25)
其中 η = η ˉ ( N ∥ x ∥ 2 2 + N 0 / σ γ 2 ) \eta = \bar{\eta}(N \|\boldsymbol{x}\|2^2 + N_0/\sigma\gamma^2) η=ηˉ(N∥x∥22+N0/σγ2)。一旦我们获得了估计值 θ ^ , τ ^ \hat{\theta}, \hat{\tau} θ^,τ^,我们可以将估计值代入 (21) 中。