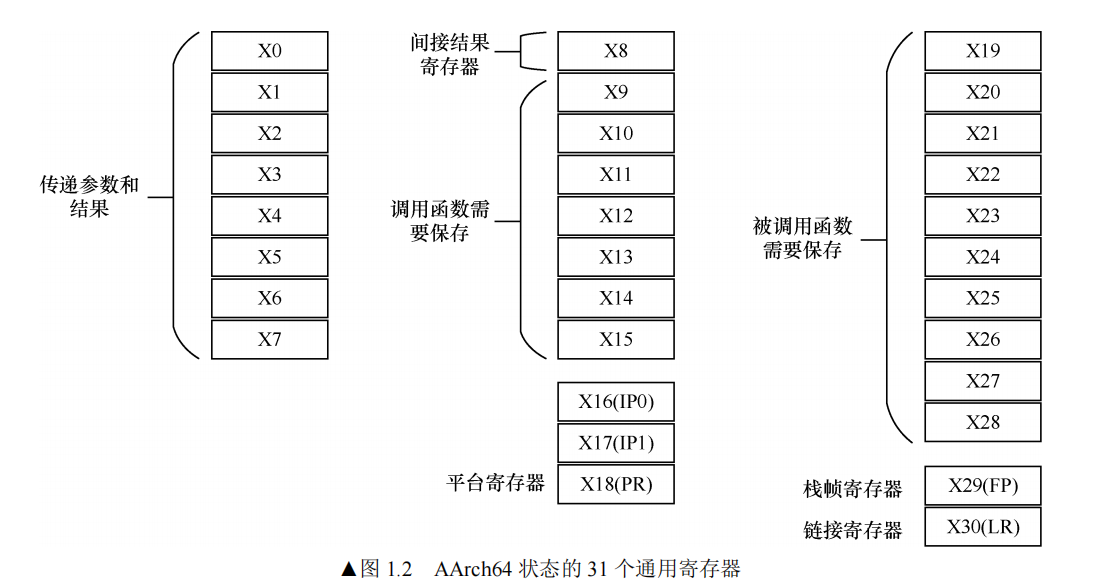
1.armV8的寄存器
AArch64 执行状态支持 31 个 64 位的通用寄存器,分别是 X0~X30 寄存器,而 AArch32
状态支持 16 个 32 位的通用寄存器
2.习题
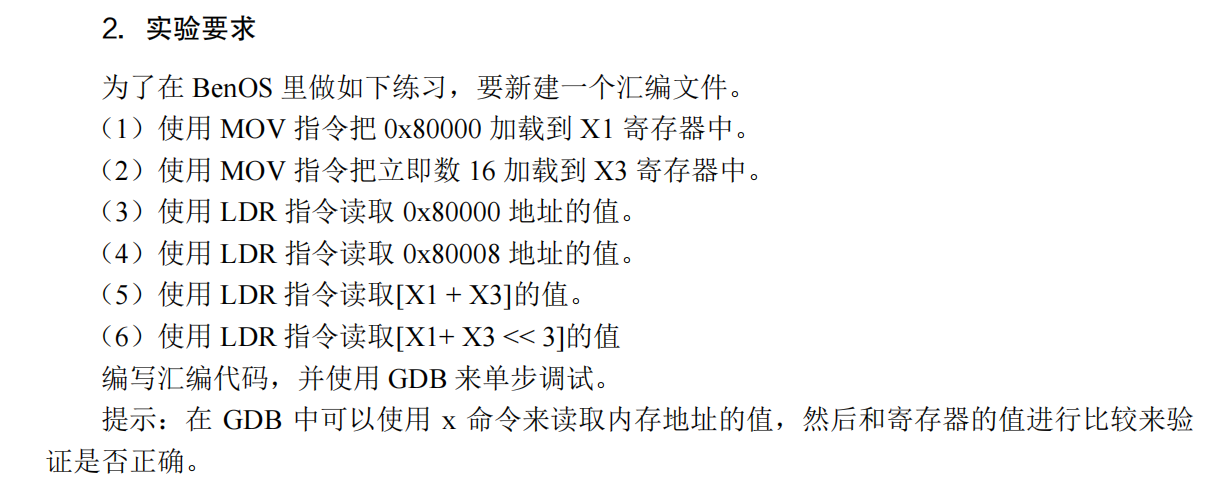
- 之前提到mov指令主要是用在寄存器与寄存器之间,和寄存器与立即数之间的数据传递所以(1)(2)就是简单的使用mov就好
- 对于(3)(4),涉及到内存与寄存器之间的数据传递显然用ldr,但为什么不是简单的
ldr x2,[0x80000],这是因为arm的指令集长度都是32位,而留给寻址地址的位数一般只有12bit,对于0x80000这样的大数据是存不下的所以CPU 的设计者规定:\[\] 里面必须是一个寄存器。(但是x86为什么可以这样写主要原因就是x86的指令集大小是可变长的) - 对于(5)
LDR X5, [X1, X3], 在编程中,数组的下标(Index)通常是一个变量(比如放在 X3 里),而不是写死的常数,所以在底层就设计了这样的汇编语言 - 对于(6)
LDR X6, [X1, X3, LSL #3],主要还是为了灵活的变换变量的宽度,将64bit转位32bit之类的运算
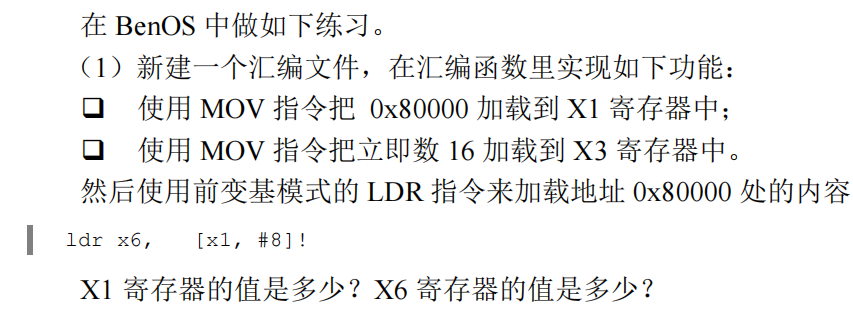
- 前变基就是先加上,再寻址
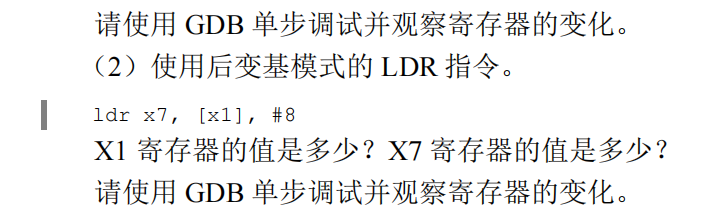
- 后变基就是先寻址,再加上
-
这里
ldr x6, =0x1234abce是个伪代码,刚刚提过指令集的位数有限,是不能处理大数字的,所以这个=是只有编译器才能看懂的,反汇编之后是这样/* 假设当前 PC 地址是 0x1000 /
ldr x6, [pc, #偏移量] / 真正的指令:去读下面那个藏好的数 /
...
...
/ 藏在代码段某个角落(文字池)的数据: */
.word 0x1234abce -
但是刚刚
mov x1,0x80000是怎么实现的呢,其实是这样的MOVZ X1, #0x8, LSL #16他是进行了一个缩放,所以使用mov有个局限性就是他后面必须跟很多0才行 -
剩下的题就很简单了,(1)是先赋值再寻址,使用str到0x400008,0x400000不变都是0
-
(2)是先寻址,使用0x50000是x6的值
- 对于第一行 就是获取0x20的地址
- 对于第二行,=伪指令,之于宏定义来说就是取他的值,就是0x20

/* test.S */
.global _start
_start:
mov x0,0x80000
mov x1,0x200000
mov x2,32
loop:
cmp x2,#0
b.eq end
ldr x3,[x0],#8
str x3,[x1],#8
sub x2, x2, #8
b loop
end:
b . /* 死循环 (跳转到当前地址) */