"机器人伺服"通常指的是机器人中用于精确控制运动(位置、速度、力矩)的核心驱动与反馈系统,其核心是伺服电机(Servo Motor)及其配套的伺服驱动器(Servo Drive)和控制系统(如运动控制器、PLC 或机器人控制器)。
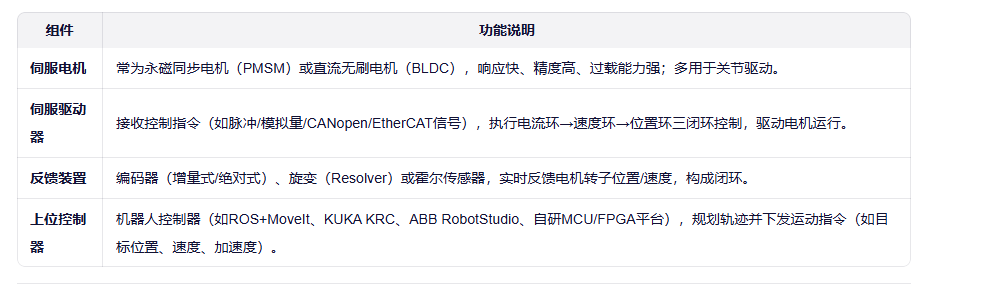
一、伺服系统的基本组成
二、机器人中伺服的关键特性要求
- 高动态响应:快速启停、抗扰动(如负载突变时仍稳速定位);
- 高重复定位精度:工业机器人常达 ±0.02 mm,依赖编码器分辨率(如17--23 bit绝对值编码器)与控制算法;
- 多轴协同同步:通过 EtherCAT / Powerlink 等实时总线实现微秒级同步(如6轴协作机器人各关节严格插补);
- 力/力矩感知扩展:高端应用(如柔性装配、康复机器人)集成六维力传感器 + 力控伺服算法(阻抗/导纳控制)。
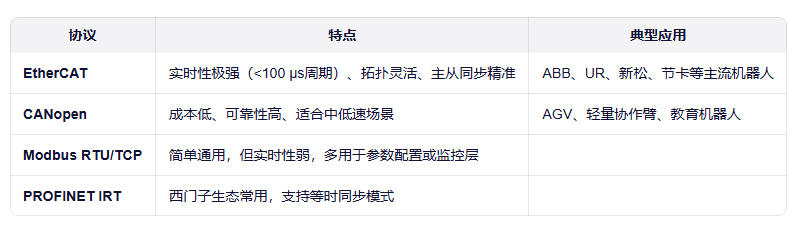
三、常见伺服通信协议(机器人领域)
四、进阶方向(前沿趋势)
- 一体化伺服模组(Motor+Drive+Encoder+Control):如Maxon EPOS4、Nidec TSD系列,简化集成,提升紧凑性;
- AI赋能伺服优化:利用LSTM预测负载变化、强化学习调参(自动整定PID/前馈参数);
- 谐波减速器+伺服协同设计:解决齿隙、柔顺性与带宽矛盾(如UBR/SPD系列高精度谐波伺服模组);
- 无传感(Sensorless)伺服技术:基于反电动势观测器(SMO、PLL)估算转子位置,降低成本(适用于部分非精密场景)。