下面按具身智能解释框架下的 "认知机制"模型(E-A-O × Closed Loop × Constraints × Governance) ,把工业场景 AMR(含车端+车队+人机协作+现场规则)当成一个可解释、可诊断、可治理 的"认知闭环系统"来拆解。
0) 先定"认知 机制 要 实现 的稳定现象"
在这个框架里,AMR 的"认知好不好"不是看算法名词,而是看闭环在扰动下能否维持稳定外在表现 (现象锚点)。文中把现象锚点写得很清楚:安全/效率/质量。
• 安全现象 :碰撞为零只是底线,更关键是 near-miss 分布可控、紧急制动可审计、行为可预测。
• 效率现象 :吞吐、准时率、拥堵概率、死锁频率、平均任务时长。
• 质量现象 :对接精度、动作成功率、货损率、异常恢复时间。
这一步非常关键:现象定义是后续机制建模与治理闭环的锚点 。
1) E-A-O:把"认知"落到可枚举的机制要素
框架要求用机制三要素描述:实体(Entities)---活动(Activities)---组织(Organization) 。
1.1 Entities:AMR 的"认知实体"不止是车
实体不仅包含车的硬件软件,还包括环境结构、制度与人。
• 车端:传感器(激光/相机/IMU/里程计)、执行器(驱动/转向/制动)、计算单元(边缘算力)、电源系统
• 环境结构:地面摩擦/坡度、窄道/路口、工位对接结构、反光/遮挡分布、动态障碍密度
• 制度与人:让行规则、禁行区、责任边界、现场操作员/叉车/行人、调度员与处置流程
1.2 Activities:AMR 的"认知活动谱系"
活动覆盖从感知到改造:感知、估计、规划、控制、交互、协同、学习与改造。
把它落到 AMR 常见活动:目标检测/跟踪、定位与不确定性估计、路径规划与让行决策、速度规划/控制、对接与装卸动作、人机交互(提示/接管)、车队协同(任务分配/拥堵控制)、基于事件的持续改进(地图/规则/策略迭代)。
1.3 Organization:真正决定"认知能力"的是组织结构
组织描述"实体与活动如何耦合成闭环、分层、冗余与降级结构"。
在工业 AMR 里,典型组织结构是分层闭环:
• 车端闭环 (安全反射+运动控制)
• 车队闭环 (任务调度+路权/拥堵协调)
• 人机闭环 (接管/处置/规则执行)
• 演化闭环 (回放/仿真/场景库驱动的版本迭代)
2) Closed Loop:把"认知"定义为循环因果与稳定性
框架明确:闭环是循环因果链条,解释关键不是"每块做什么",而是闭环如何保持稳定。
AMR 的基本循环因果:
感知 → 状态估计(含不确定性)→ 决策/控制 → 身体行动 → 环境变化 → 再感知。
并且必须按多时间尺度理解(否则解释不完整):安全反射(毫秒)---导航交互(秒)---资源协同(分钟)---学习改造(周)。
把它映射到工业现场的"认知层级":
• 毫秒级 :急停/制动裕度、障碍物近距避让(安全底线)
• 秒级 :会车让行、路口通行、进站对接(局部交互稳定)
• 分钟级 :任务分配、路权协调、拥堵消解、死锁恢复(全局秩序稳定)
• 周级 :地图/规则/策略升级,防止"修 bug 引入新 bug"(演化稳定)
3) Constraints:四类第一性约束决定"能否知道/及时做/做到/允许怎么做"
框架把约束提升为机制的一部分,而非背景:边界被约束塑形。
工业 AMR 四类约束(文中原型定义):
-
可观测性 :遮挡、反光、特征稀疏、动态障碍密度 → 决定"能否知道"
-
实时性 :感知延迟、控制周期、网络抖动 → 决定"能否及时做"
-
物理与能量 :载荷、摩擦、坡度、制动距离、电量 → 决定"能否做到"
-
安全与规范 :功能安全链路、让行规则、禁行区、责任边界 → 决定"允许怎么做"
工业现场的要点 :很多"系统看似没故障但突然不稳"的问题,本质上就是某类约束被破坏(比如反光+遮挡导致可观测性塌陷,或网络抖动导致实时性塌陷),所以约束必须进入"认知机制模型"的核心层。
4) Governance:让认知 机制 成为"可运营、可追责、可回归"的系统
框架把治理闭环写成硬标准:监控(Observables)→ 诊断(Diagnosis)→ 干预(Interventions)→ 回归验证(Regression) 。
并强调两条"不可妥协":
• 没有回归验证的干预会造成系统不可治理
• 没有版本关联的诊断无法追责
落到 AMR,就是把"认知"做成三类证据(你前面做 SLI 的时候其实已经在用它):车端证据/系统证据/治理证据。
• 车端证据(实时安全) :定位不确定性、急停率、控制延迟、传感器健康、对接误差等
• 系统证据(秩序与效率) :准时率、任务时长、拥堵热力、死锁频率、路口等待分布等
• 治理证据(变更可追责) :地图/规则/软件版本与事件对齐;场景库覆盖率、回放与仿真通过率;near-miss 的时空趋势
5) 用"失效断点图谱"把认知机制从解释变成诊断
工业 AMR 的"认知失稳"通常不是单模块坏了,而是闭环在某个位置断裂。框架给出断点分类:感知/定位/决策/控制/社会交互/协同,并说明其价值是把解释直接连接到诊断与干预。
把断点直接翻译成工业 AMR 的典型系统性问题:
• 感知断点 :误检/漏检 → 行为抖动、频繁刹停、擦碰风险
• 定位断点 :漂移/跳变 → 越线、进站失败、路径偏离
• 决策断点 :路权缺失/策略冲突 → 死锁、系统性拥堵
• 控制断点 :模型失配/轮滑 → 制动超界、对接误差放大
• 社会交互断点 :人车预期不一致 → near-miss 上升、效率坍塌
• 协同断点 :通信抖动/调度异常 → 局部最优导致全局失稳
6) 总结
工业 AMR 的认知机制 =(E-A-O 给出闭环构件与组织)×(Closed Loop 给出循环因果与多时标稳定性)×(Constraints 给出四类第一性边界)×(Governance 给出可观测-可诊断-可干预-可回归的运营闭环)。
并且它的工程落点是"三种可治理智能":可诊断(断点可定位)、可降级(约束破坏时可解释退化)、可演化(回归验证驱动持续改进)。
附: 逻辑图
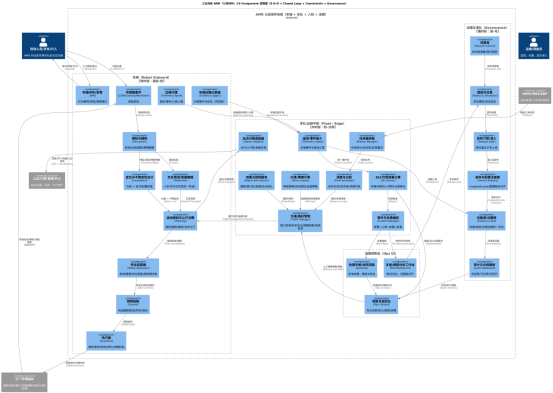
上图 关键的三点
-
闭环主链路 (感知→估计→决策/控制→行动→环境→再感知)已经在车端边界里贯通,对齐"认知作为循环因果"的定义。
-
四类约束 通过 Policy Engine / Safety Supervisor / Traffic Manager / Map&Rule 这些组件"入侵"闭环,体现"约束不是背景,而是机制的一部分"。
-
治理闭环 通过 SLI Service + Evidence Lake + Replay/Simulation + Release Gate + Version Registry形成"监控→诊断→干预→回归验证",并满足"版本关联可追责、回归验证可治理" 。