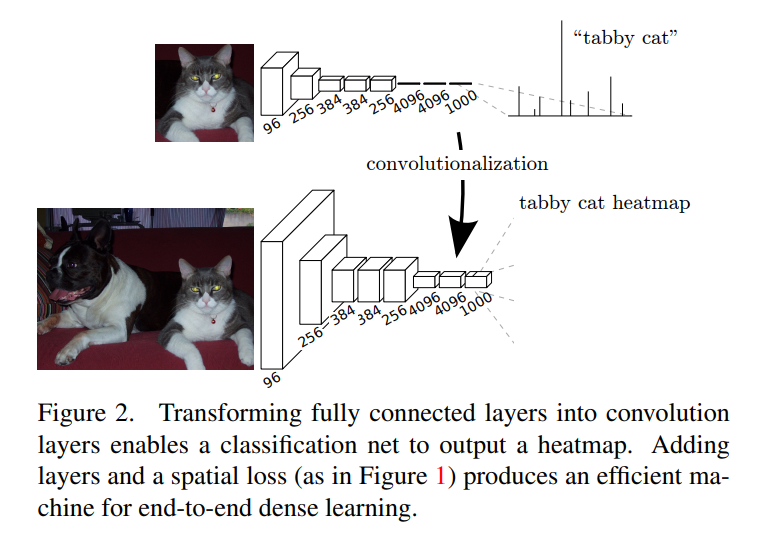
简介 :FCN图像分割的开山之作,全卷积化网络,模型由卷积层、池化层组成(没有全连接层),可以接受任意大小的输入。通过特征提取网络得到(_,512,7,7)的深层特征后恢复到原始尺寸的分割预测效果。
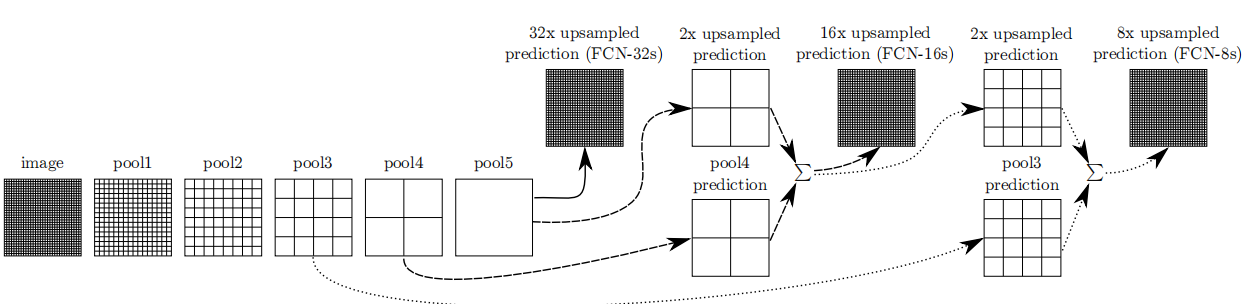
作者对比三种结构,FCN32s、FCN16s、FCN8s
FCN-32s: 直接上采样32倍
FCN-16s: 融合1次跳跃连接 + 上采样16倍
FCN-8s: 融合2次跳跃连接 + 上采样8倍
模型结构-FCN8s
分割头
python
class _FCNHead(nn.Module):
'''
FCN分割头模块 - 将主干网络提取的特征映射到分割类别空间
作用:
1. 将高维特征(512维)降维到与类别数匹配的维度
2. 通过额外的卷积层进一步融合特征,提升分割精度
3. 作为FCN模型中的解码器头部
参数:
in_channels: 输入特征图的通道数,通常为512(VGG最后一层输出)
out_channels: 输出通道数,等于分割的类别数(如PASCAL VOC的21类)
norm_layer: 归一化层类型,默认为BatchNorm2d
'''
def __init__(self, in_channels, out_channels, norm_layer=nn.BatchNorm2d, **kwargs):
super(_FCNHead, self).__init__()
# 中间通道数:将输入通道数压缩到1/4,作为中间表示
inter_channels = in_channels // 4
# 定义分割头的网络块
self.block = nn.Sequential(
nn.Conv2d(in_channels=in_channels,
out_channels=inter_channels,
kernel_size=3, # 使用3×3卷积核(非1×1)可以融合空间上下文信息
padding=1, # padding=1保持特征图尺寸不变
bias=False), # bias=False因为后续有BatchNorm,bias参数冗余
norm_layer(inter_channels), # 2. 归一化层:加速训练,稳定梯度
nn.ReLU(inplace=True),
nn.Dropout(0.1), # 正则化, 随机丢弃10%的神经元,增强模型泛化能力
nn.Conv2d(inter_channels, out_channels, 1) # 1×1卷积层:通道数映射到类别数
)
def forward(self, x):
"""
x: 例如:(1, 512, 16, 16)
返回: 例如:(1, 21, 16, 16),每个位置有21个类别的得分
"""
return self.block(x)FCN主网络
python
class FCN8s(nn.Module):
"""
1. 融合pool3(8倍下采样)、pool4(16倍下采样)、pool5(32倍下采样)三个层次的特征
2. 两次跳跃连接,逐步上采样,获得精细的分割结果
3. 输出相对于输入下采样8倍(8s的含义)
"""
def __init__(self, nclass, backbone='vgg16', aux=False, pretrained_base=True,
norm_layer=nn.BatchNorm2d, **kwargs):
super(FCN8s, self).__init__()
self.aux = aux # 是否使用辅助损失
# 加载并拆分VGG16主干网络
if backbone == 'vgg16':
self.pretrained = vgg16(pretrained=pretrained_base).features # 只使用VGG的卷积部分(features)
else:
raise RuntimeError('unknown backbone: {}'.format(backbone))
# 将VGG的卷积层拆分为三个部分,对应三个下采样级别, VGG16 features共有31层(0-30)
self.pool3 = nn.Sequential(*self.pretrained[:17]) # 层0-16: Conv1_1 ~ Conv3_3 (第3个池化层前)
self.pool4 = nn.Sequential(*self.pretrained[17:24]) # 层17-23: Conv4_1 ~ Conv4_3 (第4个池化层前)
self.pool5 = nn.Sequential(*self.pretrained[24:]) # 层24-30: Conv5_1 ~ Conv5_3+MaxPool5
# 分割头
self.head = _FCNHead(512, nclass, norm_layer)
# 跳跃连接的1x1卷积 - 调整浅层特征的通道数
self.score_pool3 = nn.Conv2d(256, nclass, 1) # pool3输出256通道
self.score_pool4 = nn.Conv2d(512, nclass, 1) # pool4输出512通道
# 辅助输出头(可选) - 用于训练时的辅助监督
if aux:
self.auxlayer = _FCNHead(512, nclass, norm_layer)
# 标识需要特殊训练处理的模块,可设定不同的学习率
self.__setattr__('exclusive',
['head', 'score_pool3', 'score_pool4', 'auxlayer'] if aux
else ['head', 'score_pool3', 'score_pool4'])
def forward(self, x):
"""
x: 输入图像,形状为(batch_size, 3, H, W)
返回: 分割结果,形状为(batch_size, nclass, H, W)
"""
# ========== 阶段1:特征提取 ==========
pool3 = self.pool3(x) # 提取pool3特征 (下采样8倍) → (batch, 256, H/8, W/8)
pool4 = self.pool4(pool3) # 提取pool4特征 (下采样16倍) → (batch, 512, H/16, W/16)
pool5 = self.pool5(pool4) # 提取pool5特征 (下采样32倍) → (batch, 512, H/32, W/32)
outputs = [] # 存储所有输出,主要方便查看中间结果,可以没有
# ========== 阶段2:三个层次的特征预测 ==========
score_fr = self.head(pool5) # 深层特征预测 → (batch, nclass, H/32, W/32)
score_pool4 = self.score_pool4(pool4) # 中层特征预测 → (batch, nclass, H/16, W/16)
score_pool3 = self.score_pool3(pool3) # 浅层特征预测 → (batch, nclass, H/8, W/8)
# ========== 阶段3:第一次融合 (pool5 + pool4) ==========
# 将深层特征上采样2倍到pool4的分辨率, 深层语义 + 中层细节
upscore2 = F.interpolate(score_fr, score_pool4.size()[2:], mode='bilinear', align_corners=True)
fuse_pool4 = upscore2 + score_pool4 # → (batch, nclass, H/16, W/16)
# ========== 阶段4:第二次融合 (fuse_pool4 + pool3) ==========
# 将融合后的特征上采样2倍到pool3的分辨率, 中层融合特征 + 浅层细节
upscore_pool4 = F.interpolate(fuse_pool4, score_pool3.size()[2:], mode='bilinear', align_corners=True)
fuse_pool3 = upscore_pool4 + score_pool3 # → (batch, nclass, H/8, W/8)
# ========== 阶段5:最终上采样 ==========
# 将融合了三个层次的特征上采样8倍到原始输入尺寸
out = F.interpolate(fuse_pool3, x.size()[2:], mode='bilinear', align_corners=True)
outputs.append(out)
# ========== 阶段6:辅助输出 (可选) ==========
if self.aux:
# 直接从pool5特征预测并上采样32倍
auxout = self.auxlayer(pool5)
auxout = F.interpolate(auxout, x.size()[2:], mode='bilinear', align_corners=True)
outputs.append(auxout) # 辅助输出
return tuple(outputs) # 返回元组: (主输出, 辅助输出) 或 (主输出,)损失函数与评估指标
逐像素的交叉熵损失(Pixel-wise Cross-Entropy Loss)
python
class CrossEntropyLoss2d(_WeightedLoss):
"""
Standard pytorch weighted nn.CrossEntropyLoss
"""
def __init__(self, weight=None, ignore_label=255, reduction='mean'):
super(CrossEntropyLoss2d, self).__init__()
self.loss = nn.CrossEntropyLoss(weight, ignore_index=ignore_label, reduction=reduction)
def forward(self, output, target):
"""
Forward pass
:param output: torch.tensor (NxC)
:param target: torch.tensor (N)
:return: scalar
"""
return self.loss(output, target)评估指标,论文用到MeanIU、pixel acc、mean acc、 f.w.IU
python
"""
Reference to https://github.com/jfzhang95/pytorch-deeplab-xception/blob/master/utils/metrics.py
Add metrics: Precision、Recall、F1-Score
"""
import numpy as np
np.seterr(divide='ignore', invalid='ignore')
__all__ = ['SegmentationMetric']
"""
confusionMetric # 注意:此处横着代表预测值,竖着代表真实值,与之前介绍的相反
P\L P N
P TP FP
N FN TN
sum(axis=0) TP+FN
sum(axis=1) TP+FP
np.diag().sum() TP+TN
"""
class SegmentationMetric(object):
def __init__(self, numClass):
self.numClass = numClass
self.confusionMatrix = np.zeros((self.numClass,)*2)
def pixelAccuracy(self):
# return all class overall pixel accuracy
# PA = acc = (TP + TN) / (TP + TN + FP + FN)
acc = np.diag(self.confusionMatrix).sum() / self.confusionMatrix.sum()
return acc
def meanPixelAccuracy(self):
# return each category pixel accuracy(A more accurate way to call it precision)
# acc = TP / (TP + FP)
Cpa = np.diag(self.confusionMatrix) / self.confusionMatrix.sum(axis=1)
Mpa = np.nanmean(Cpa) # 求各类别Cpa的平均
return Mpa, Cpa # 返回的是一个列表值,如:[0.90, 0.80, 0.96],表示类别1 2 3各类别的预测准确率
def meanIntersectionOverUnion(self):
# Intersection = TP ;Union = TP + FP + FN
# Ciou = TP / (TP + FP + FN)
intersection = np.diag(self.confusionMatrix) # 取对角元素的值,返回列表
union = np.sum(self.confusionMatrix, axis=1) + np.sum(self.confusionMatrix, axis=0) - np.diag(self.confusionMatrix) # axis = 1表示混淆矩阵行的值,返回列表; axis = 0表示取混淆矩阵列的值,返回列表
Ciou = (intersection / np.maximum(1.0, union)) # 返回列表,其值为各个类别的Ciou
mIoU = np.nanmean(Ciou) # 求各类别Ciou的平均
return mIoU, Ciou
def Frequency_Weighted_Intersection_over_Union(self):
# FWIOU = [(TP+FN)/(TP+FP+TN+FN)] *[TP / (TP + FP + FN)]
freq = np.sum(self.confusionMatrix, axis=1) / np.sum(self.confusionMatrix)
iu = np.diag(self.confusionMatrix) / (
np.sum(self.confusionMatrix, axis=1) + np.sum(self.confusionMatrix, axis=0) -
np.diag(self.confusionMatrix))
FWIoU = (freq[freq > 0] * iu[freq > 0]).sum()
return FWIoU
def precision(self):
# precision = TP / (TP+FP)
precision = np.diag(self.confusionMatrix) / np.sum(self.confusionMatrix, axis=1)
return precision
def recall(self):
# recall = TP / (TP+FN)
recall = np.diag(self.confusionMatrix) / np.sum(self.confusionMatrix, axis=0)
return recall
def genConfusionMatrix(self, imgPredict, imgLabel): # 同FCN中score.py的fast_hist()函数
# remove classes from unlabeled pixels in gt image and predict
mask = (imgLabel >= 0) & (imgLabel < self.numClass)
label = self.numClass * imgLabel[mask].astype('int') + imgPredict[mask]
count = np.bincount(label, minlength=self.numClass**2)
confusionMatrix = count.reshape(self.numClass, self.numClass)
return confusionMatrix
def addBatch(self, imgPredict, imgLabel):
assert imgPredict.shape == imgLabel.shape
self.confusionMatrix += self.genConfusionMatrix(imgPredict, imgLabel)
def reset(self):
self.confusionMatrix = np.zeros((self.numClass, self.numClass))
if __name__ == '__main__':
imgPredict = np.array([0, 0, 1, 1, 2, 2]) # 可直接换成预测图片
imgLabel = np.array([0, 0, 1, 1, 1, 2]) # 可直接换成标注图片
metric = SegmentationMetric(3) # 3表示有3个分类,有几个分类就填几
metric.addBatch(imgPredict, imgLabel)
pa = metric.pixelAccuracy()
mpa = metric.meanPixelAccuracy()
fwIU = metric.Frequency_Weighted_Intersection_over_Union()
mIoU, per = metric.meanIntersectionOverUnion()
print('pa is : %f' % pa)
print('fwiu is : %f' % fwIU) # 列表
print('mpa is : %f' % mpa[0], mpa[1])
print('mIoU is : %f' % mIoU, per)FCN32s、FCN16s、FCN8s全部
python
import torch
import torch.nn as nn
import torch.nn.functional as F
from vgg import vgg16
class _FCNHead(nn.Module):
'''
FCN分割头模块 - 将主干网络提取的特征映射到分割类别空间
作用:
1. 将高维特征(512维)降维到与类别数匹配的维度
2. 通过额外的卷积层进一步融合特征,提升分割精度
3. 作为FCN模型中的解码器头部
参数:
in_channels: 输入特征图的通道数,通常为512(VGG最后一层输出)
out_channels: 输出通道数,等于分割的类别数(如PASCAL VOC的21类)
norm_layer: 归一化层类型,默认为BatchNorm2d
'''
def __init__(self, in_channels, out_channels, norm_layer=nn.BatchNorm2d, **kwargs):
super(_FCNHead, self).__init__()
# 中间通道数:将输入通道数压缩到1/4,作为中间表示
inter_channels = in_channels // 4
# 定义分割头的网络块
self.block = nn.Sequential(
nn.Conv2d(in_channels=in_channels,
out_channels=inter_channels,
kernel_size=3, # 使用3×3卷积核(非1×1)可以融合空间上下文信息
padding=1, # padding=1保持特征图尺寸不变
bias=False), # bias=False因为后续有BatchNorm,bias参数冗余
norm_layer(inter_channels), # 2. 归一化层:加速训练,稳定梯度
nn.ReLU(inplace=True),
nn.Dropout(0.1), # 正则化, 随机丢弃10%的神经元,增强模型泛化能力
nn.Conv2d(inter_channels, out_channels, 1) # 1×1卷积层:通道数映射到类别数
)
def forward(self, x):
"""
x: 例如:(1, 512, 16, 16)
返回: 例如:(1, 21, 16, 16),每个位置有21个类别的得分
"""
return self.block(x)
class FCN32s(nn.Module):
def __init__(self, nclass, backbone='vgg16', aux=False, pretrained_base=True,
norm_layer=nn.BatchNorm2d, **kwargs):
super(FCN32s, self).__init__()
self.aux = aux
# 只加载VGG16的卷积部分(去除全连接层)
if backbone == 'vgg16':
self.pretrained = vgg16(pretrained=pretrained_base).features
else:
raise RuntimeError('unknown backbone: {}'.format(backbone))
# 分割头(1x1卷积)
self.head = _FCNHead(512, nclass, norm_layer=norm_layer)
if aux:
self.auxlayer = _FCNHead(512, nclass, norm_layer=norm_layer)
self.__setattr__('exclusive', ['head', 'auxlayer'] if aux else ['head'])
def forward(self, x):
# ([1, 3, 224, 224])
size = x.size()[2:]
# VGG16特征提取器(固定权重) conv1~conv5 下采样32倍
pool5 = self.pretrained(x) # ([1, 512, 7, 7])
outputs = []
# 分割头将其分割到目标的类别数
out = self.head(pool5) # ([1, 21, 7, 7])
# 上采样32倍
out = F.interpolate(out, size=size, mode='bilinear', align_corners=True) # ([1, 21, 224, 224])
outputs.append(out)
if self.aux:
auxout = self.auxlayer(pool5)
auxout = F.interpolate(auxout, size=size, mode='bilinear', align_corners=True)
outputs.append(auxout)
return tuple(outputs)
class FCN16s(nn.Module):
def __init__(self, nclass, backbone='vgg16', aux=False, pretrained_base=True,
norm_layer=nn.BatchNorm2d, **kwargs):
super(FCN16s, self).__init__()
self.aux = aux
if backbone == 'vgg16':
self.pretrained = vgg16(pretrained=pretrained_base).features
else:
raise RuntimeError('unknown backbone: {}'.format(backbone))
self.pool4 = nn.Sequential(*self.pretrained[:24]) # vgg 00~23层
self.pool5 = nn.Sequential(*self.pretrained[24:]) # vgg 24~30层
self.head = _FCNHead(512, nclass, norm_layer=norm_layer)
self.score_pool4 = nn.Conv2d(512, nclass, 1) # 跳跃连接模块
if aux:
self.auxlayer = _FCNHead(512, nclass, norm_layer=norm_layer)
self.__setattr__('exclusive', ['head', 'score_pool4', 'auxlayer'] if aux else ['head', 'score_pool4'])
def forward(self, x):
# input size 1 3 224 224
# vgg 特征提取
pool4 = self.pool4(x) # (_, 512, 14, 14) ← 下采样16倍, 较浅特征,细节丰富
pool5 = self.pool5(pool4) # (_, 512, 7, 7) ← 下采样32倍, 深层特征,语义丰富
# 分别进行类别预测
outputs = []
score_fr = self.head(pool5) # (nclass, 7, 7) 深层预测
score_pool4 = self.score_pool4(pool4) # (nclass, 14, 14) 浅层预测
# 第一次上采样:深层特征上采样2倍到浅层分辨率
upscore2 = F.interpolate(score_fr, score_pool4.size()[2:], mode='bilinear', align_corners=True) # (_, nclass, 14, 14)
# 特征融合:深层语义 + 浅层细节
fuse_pool4 = upscore2 + score_pool4 # (_, nclass, 14, 14)
# 最终上采样:16倍到原图尺寸
out = F.interpolate(fuse_pool4, x.size()[2:], mode='bilinear', align_corners=True) # (_, nclass, 224, 224)
outputs.append(out)
if self.aux:
auxout = self.auxlayer(pool5)
auxout = F.interpolate(auxout, x.size()[2:], mode='bilinear', align_corners=True)
outputs.append(auxout)
return tuple(outputs)
class FCN8s(nn.Module):
"""
1. 融合pool3(8倍下采样)、pool4(16倍下采样)、pool5(32倍下采样)三个层次的特征
2. 两次跳跃连接,逐步上采样,获得精细的分割结果
3. 输出相对于输入下采样8倍(8s的含义)
"""
def __init__(self, nclass, backbone='vgg16', aux=False, pretrained_base=True,
norm_layer=nn.BatchNorm2d, **kwargs):
super(FCN8s, self).__init__()
self.aux = aux # 是否使用辅助损失
# 加载并拆分VGG16主干网络
if backbone == 'vgg16':
self.pretrained = vgg16(pretrained=pretrained_base).features # 只使用VGG的卷积部分(features)
else:
raise RuntimeError('unknown backbone: {}'.format(backbone))
# 将VGG的卷积层拆分为三个部分,对应三个下采样级别, VGG16 features共有31层(0-30)
self.pool3 = nn.Sequential(*self.pretrained[:17]) # 层0-16: Conv1_1 ~ Conv3_3 (第3个池化层前)
self.pool4 = nn.Sequential(*self.pretrained[17:24]) # 层17-23: Conv4_1 ~ Conv4_3 (第4个池化层前)
self.pool5 = nn.Sequential(*self.pretrained[24:]) # 层24-30: Conv5_1 ~ Conv5_3+MaxPool5
# 分割头
self.head = _FCNHead(512, nclass, norm_layer)
# 跳跃连接的1x1卷积 - 调整浅层特征的通道数
self.score_pool3 = nn.Conv2d(256, nclass, 1) # pool3输出256通道
self.score_pool4 = nn.Conv2d(512, nclass, 1) # pool4输出512通道
# 辅助输出头(可选) - 用于训练时的辅助监督
if aux:
self.auxlayer = _FCNHead(512, nclass, norm_layer)
# 标识需要特殊训练处理的模块,可设定不同的学习率
self.__setattr__('exclusive',
['head', 'score_pool3', 'score_pool4', 'auxlayer'] if aux
else ['head', 'score_pool3', 'score_pool4'])
def forward(self, x):
"""
x: 输入图像,形状为(batch_size, 3, H, W)
返回: 分割结果,形状为(batch_size, nclass, H, W)
"""
# ========== 阶段1:特征提取 ==========
pool3 = self.pool3(x) # 提取pool3特征 (下采样8倍) → (batch, 256, H/8, W/8)
pool4 = self.pool4(pool3) # 提取pool4特征 (下采样16倍) → (batch, 512, H/16, W/16)
pool5 = self.pool5(pool4) # 提取pool5特征 (下采样32倍) → (batch, 512, H/32, W/32)
outputs = [] # 存储所有输出,主要方便查看中间结果,可以没有
# ========== 阶段2:三个层次的特征预测 ==========
score_fr = self.head(pool5) # 深层特征预测 → (batch, nclass, H/32, W/32)
score_pool4 = self.score_pool4(pool4) # 中层特征预测 → (batch, nclass, H/16, W/16)
score_pool3 = self.score_pool3(pool3) # 浅层特征预测 → (batch, nclass, H/8, W/8)
# ========== 阶段3:第一次融合 (pool5 + pool4) ==========
# 将深层特征上采样2倍到pool4的分辨率, 深层语义 + 中层细节
upscore2 = F.interpolate(score_fr, score_pool4.size()[2:], mode='bilinear', align_corners=True)
fuse_pool4 = upscore2 + score_pool4 # → (batch, nclass, H/16, W/16)
# ========== 阶段4:第二次融合 (fuse_pool4 + pool3) ==========
# 将融合后的特征上采样2倍到pool3的分辨率, 中层融合特征 + 浅层细节
upscore_pool4 = F.interpolate(fuse_pool4, score_pool3.size()[2:], mode='bilinear', align_corners=True)
fuse_pool3 = upscore_pool4 + score_pool3 # → (batch, nclass, H/8, W/8)
# ========== 阶段5:最终上采样 ==========
# 将融合了三个层次的特征上采样8倍到原始输入尺寸
out = F.interpolate(fuse_pool3, x.size()[2:], mode='bilinear', align_corners=True)
outputs.append(out)
# ========== 阶段6:辅助输出 (可选) ==========
if self.aux:
# 直接从pool5特征预测并上采样32倍
auxout = self.auxlayer(pool5)
auxout = F.interpolate(auxout, x.size()[2:], mode='bilinear', align_corners=True)
outputs.append(auxout) # 辅助输出
return tuple(outputs) # 返回元组: (主输出, 辅助输出) 或 (主输出,)
if __name__ == '__main__':
from thop import profile
device = torch.device('cpu')
model = FCN8s(21)
# model = FCN16s(21)
# model = FCN32s(21)
model = model.to(device)
input = torch.randn(1, 3, 224, 224)
input = input.to(device)
flops, params = profile(model, inputs=(input, ))
print('FLOPs = ' + str(flops / 1000 ** 3) + 'G')
print('Params = ' + str(params / 1000 ** 2) + 'M')