GESP C++ 2025年3月五级真题,贪心思想考点,涉及排序,题目难度⭐⭐⭐☆☆,五级正常难度。洛谷难度等级普及/提高−
luogu-P11960 GESP202503 五级 平均分配
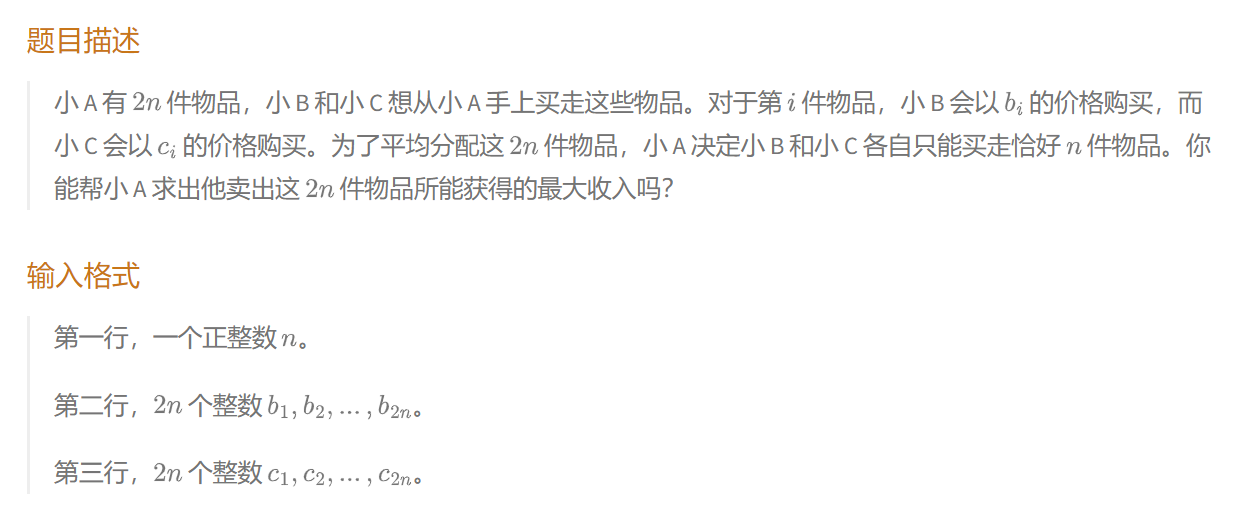
题目要求
题目题解详见:https://www.coderli.com/gesp-5-luogu-p11960/
https://www.coderli.com/gesp-5-luogu-p11960/![]() https://www.coderli.com/gesp-5-luogu-p11960/
https://www.coderli.com/gesp-5-luogu-p11960/
GESP C++ 2025年3月五级真题,贪心思想考点,涉及排序,题目难度⭐⭐⭐☆☆,五级正常难度。洛谷难度等级普及/提高−
题目题解详见:https://www.coderli.com/gesp-5-luogu-p11960/
https://www.coderli.com/gesp-5-luogu-p11960/![]() https://www.coderli.com/gesp-5-luogu-p11960/
https://www.coderli.com/gesp-5-luogu-p11960/