一、原理介绍
常规的永磁同步电机全速域无位置传感器控制通过复合两种位置观测器实现全速域的转子位置估计,然而,在电机频繁宽频域调速工况下,两种位置观测器频繁地切换,易导致估计的位置和转速振荡,并且两种位置估计方法需要单独的设计和调谐,增加了系统整定难度和算法复杂度。为此,采用了一种基于共振扩张状态观测器的内置式永磁同步电机统一全速域无位置传感器控制方法。首先,通过共振扩张状态观测器估计基频反电动势和高频反电动势。然后, 建立了统一全速域模型,通过统一全速域模型实现全速域的转子位置和转速估计。在零速和低速时,通过向d轴注入高频电压,增加统一全速域模型中转子位置信息的信噪比,从而可以准确估计零速和低速区的转子位置,消除了传统高频注入法中由滤波器和延迟引起的估计误差。当电机在中高速区运行时,统一全速域模型自动蜕变为基频模型法,不需要两种位置观测器切换控制。
二、仿真模型
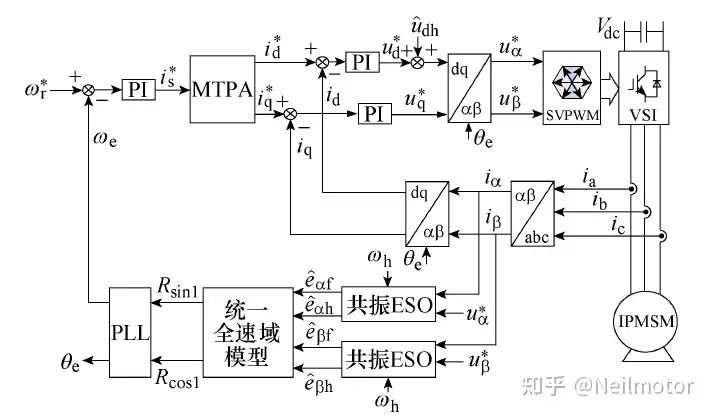
在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:

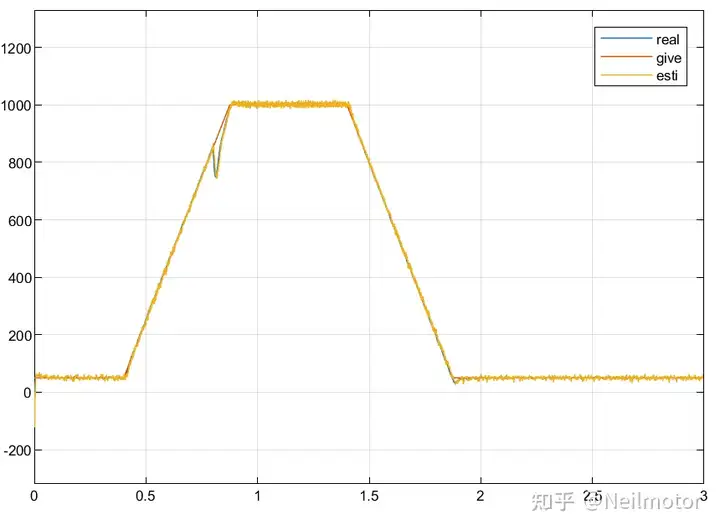
1.宽范围无传感器稳定运行;
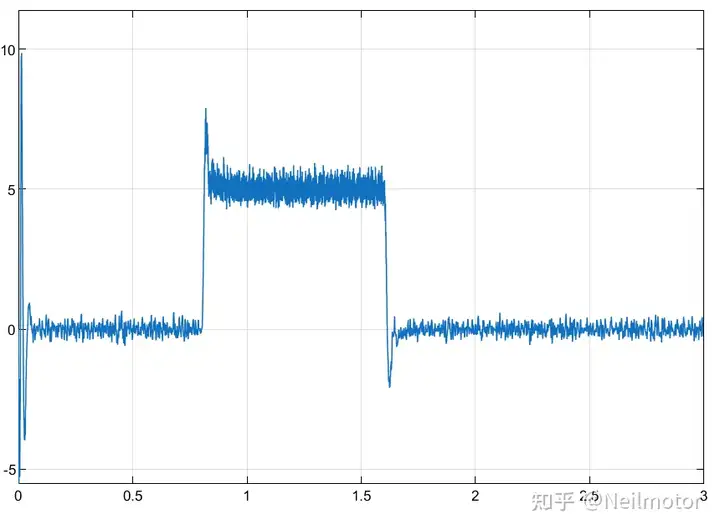
转速
转速误差
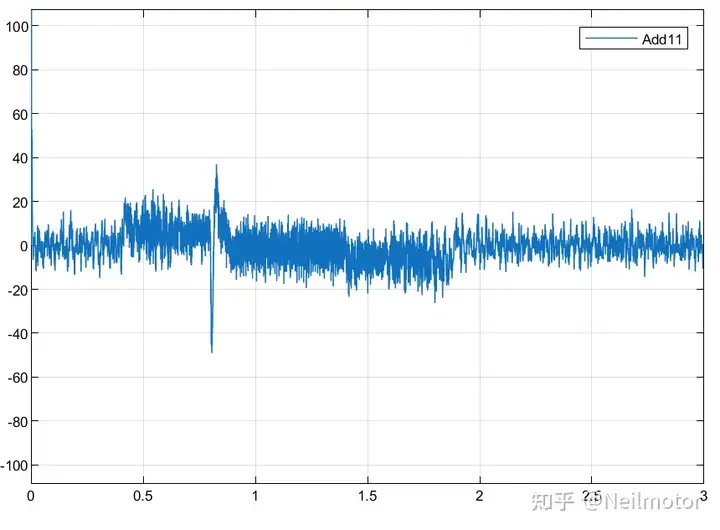
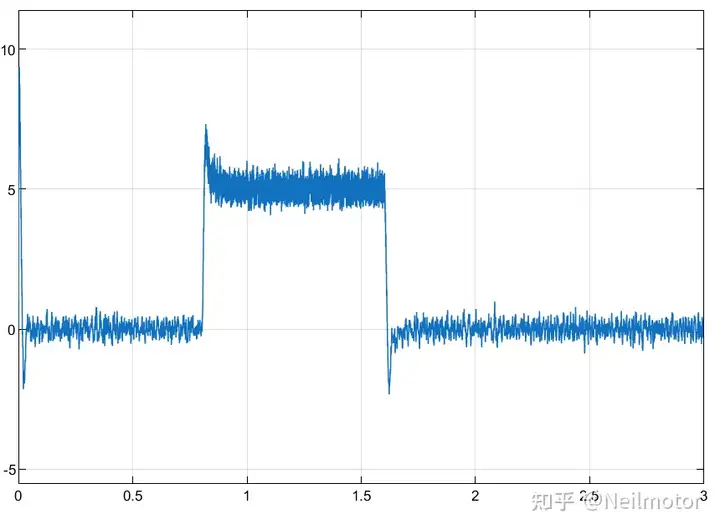
转子位置误差

本文采用的技术路线是在零低速注入高频正弦电压以增强LESO在零低速时提取信号的信噪比。相比于之前分享的自适应观测器,稳定性更强,缺点则是需要注入信号;与传统高频切换观测器的方法,文章提出了一种全速域模型,无需切换,算法更简便,过渡更平滑。
从转速波形中可以看出,在加速过程中0.8s时,直接施加了额定负载,算法抗扰性能较强。转子位置误差基本在0.1rad内,说明存在一定是的相位滞后,这主要是LESO低通性质导致的。转速误差在稳定状态基本在±10rpm之间,在中高速稳态以及加速过程中,转速波动较为明显是因为我保持了高频信号的注入,如果觉得波动较大,可以设置一个阈值或者过渡阶段,逐渐减小乃至消除高频注入电压信号。本次主要是验证性能,不再展示波形。
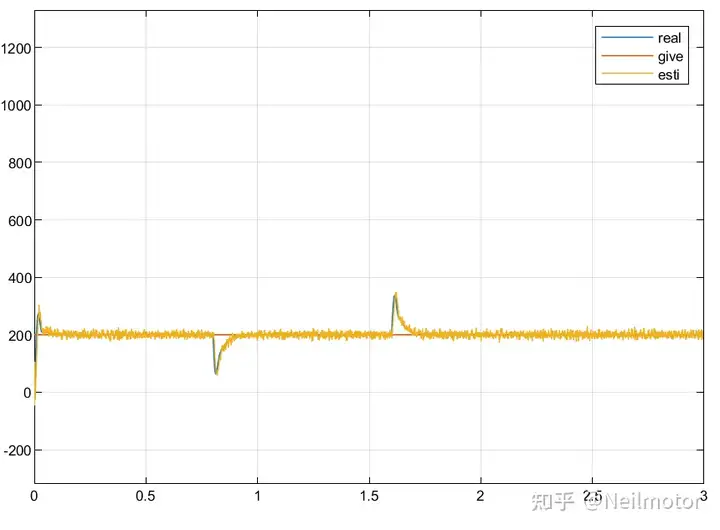
2.低速加满载;
转速
电磁转矩
3. 零速加满载;
转速
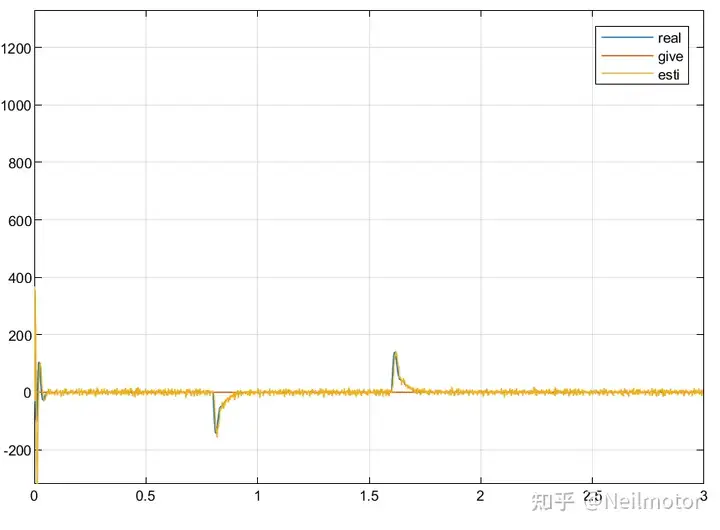
电磁转矩
可以看出文章提出的方法可以实现所描述的全速域统一模型无感控制性能,并且实现零速带满载能力,具有较好的全速域无感稳定性能及抗扰性能。