当你看到机器人精准抓取杯子、灵活折叠衣物,或是按照语音指令整理餐桌时,可能会好奇:它们是如何学会这些复杂动作的?传统机器人编程需要工程师逐行编写代码,指定每一个关节的运动轨迹,不仅耗时耗力,还难以应对多变的场景。而如今,一种名为 "从演示学习"(Learning from Demonstrations, LfD)的技术正在改变这一切 ------ 机器人只需观察人类或其他专家的示范,就能自主学会相应技能。
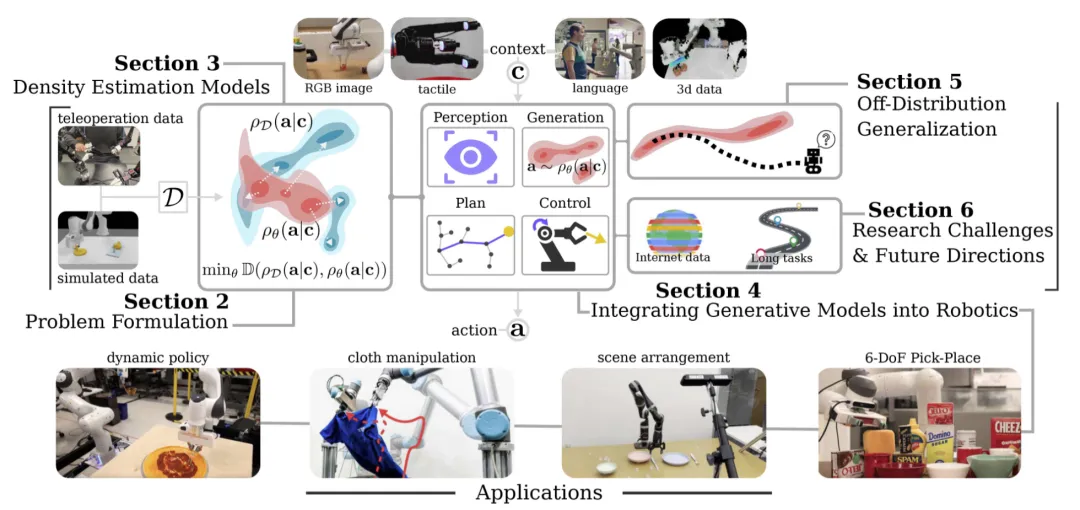
近年来,深度生成模型(Deep Generative Models, DGM)的崛起为 LfD 注入了强大动力。这些模型擅长捕捉复杂的数据分布,能完美应对演示数据中的噪声、多模态行为(同一任务的多种完成方式)等问题,让机器人的学习能力实现质的飞跃。本文将带大家走进这个跨界领域,揭开深度生成模型让机器人 "学以致用" 的神秘面纱。
核心概念:机器人学习的 "两大基石"
要理解这项技术,首先要搞懂两个关键概念:从演示学习与深度生成模型。
从演示学习:机器人的 "模仿式学习"
从演示学习,通俗来说就是机器人的 "模仿学习"。它的核心逻辑很简单:专家(人类或其他机器人)完成任务时,会留下一系列动作数据(比如抓取物体时的关节角度、末端执行器位置等),机器人通过学习这些数据,模仿专家的行为模式,从而掌握相同技能。
这种学习方式避免了复杂的手工编程,尤其适合处理抓取、装配、烹饪等需要精细操作的任务。不过,真实世界的演示数据并不完美 ------ 不同专家的操作习惯不同(比如有人用左手抓杯子,有人用右手)、环境中存在干扰(比如桌面杂乱)、动作数据维度高,这些都给机器人学习带来了挑战。
深度生成模型:数据分布的 "捕捉大师"
深度生成模型是一类特殊的深度学习模型,它的核心能力是 "学习数据的分布规律",并能基于这些规律生成新的、与原始数据相似的样本。打个比方,如果你给它看 1000 张猫咪的图片,它能学会猫咪的外形特征,进而生成一张全新的、逼真的猫咪图片。
正是这种 "捕捉复杂分布" 的能力,让深度生成模型成为机器人从演示学习的理想工具。它能处理演示数据中的多模态行为(比如抓取同一物体的多种姿势)、高维度特征(比如图像 + 触觉的多感官数据),还能生成符合任务需求的新动作,让机器人在未见过的场景中也能灵活应对。
主流深度生成模型:机器人的 "技能学习工具箱"
在机器人领域,研究者们开发并应用了多种深度生成模型,它们各自擅长不同的任务场景,共同构成了机器人的 "技能学习工具箱"。
采样模型:快速生成的 "效率派"
采样模型是最常用的一类深度生成模型,核心特点是 "快速生成动作样本"。给定一个简单的噪声信号和任务场景信息(比如 "抓取桌面上的杯子"),它能直接输出一个可行的动作。
代表模型
:变分自编码器(VAE)、生成对抗网络(GAN)、归一化流(NFlow)。
机器人应用
:VAE 可生成碰撞 - free 的抓取姿态,帮机器人快速找到安全的抓取点;GAN 能为长时任务(比如组装家具)生成初始动作方案,再由后续模块优化;NFlow 则兼具快速采样和概率计算能力,适合需要精准控制的场景。
能量基模型:权衡多方需求的 "策略家"
能量基模型(EBM)的核心思想是为每个可能的动作分配一个 "能量值"------ 能量越低,动作越符合任务需求。它就像一个严谨的策略家,会综合考虑多种约束(比如避免碰撞、符合关节极限),选择最优动作。
核心优势
:支持模块化组合,比如将 "抓取可行性" 和 "碰撞避免" 两个独立的 EBM 组合,就能生成既有效又安全的抓取动作。
机器人应用
:常用于定义任务的成本 / 奖励函数(比如让机器人知道 "怎样的动作能拿到奖励"),也能直接生成抓取姿态、末端执行器位置等关键动作参数。
扩散模型:精准细腻的 "细节控"
扩散模型(DM)是近年来的 "明星模型",它通过 "逐步去噪" 的过程学习数据分布 ------ 先给真实动作数据加入噪声,再学习如何一步步去除噪声,还原真实动作。这个过程让它能生成高质量、高维度的动作序列。
核心优势
:擅长处理连续的轨迹数据,生成的动作平滑、精准,且训练过程稳定。
机器人应用
:主要用于轨迹生成,比如烹饪时的连续搅拌动作、装配任务中的零件搬运路径;也能生成 3D 姿态(比如物体的放置位置)、场景布置方案(比如按指令整理餐具)。
分类模型:离散决策的 "规划师"
分类模型将连续的动作空间离散化为多个 "动作类别",给定任务场景后,它会输出每个类别的概率,选择概率最高的动作执行。
代表类型
:动作价值图(将动作映射到图像像素,比如 "图像中哪个位置适合抓取")、GPT 类自回归模型(像生成文本一样逐步生成动作序列)。
机器人应用
:动作价值图适合顶视抓取、桌面整理等任务;GPT 类模型则能处理语言 - 动作结合的场景,比如根据 "把杯子放在书架上" 的语音指令,生成连续的搬运动作。
混合密度模型:应对多模态的 "多面手"
混合密度模型(MDM)将动作分布表示为多个简单分布的混合(比如多个高斯分布),特别适合处理 "同一任务有多种可行动作" 的多模态场景。
机器人应用
:常用于视觉 - 运动控制策略,比如机器人面对倾斜的杯子时,能生成多种不同的抓取姿态,适应物体的摆放状态。
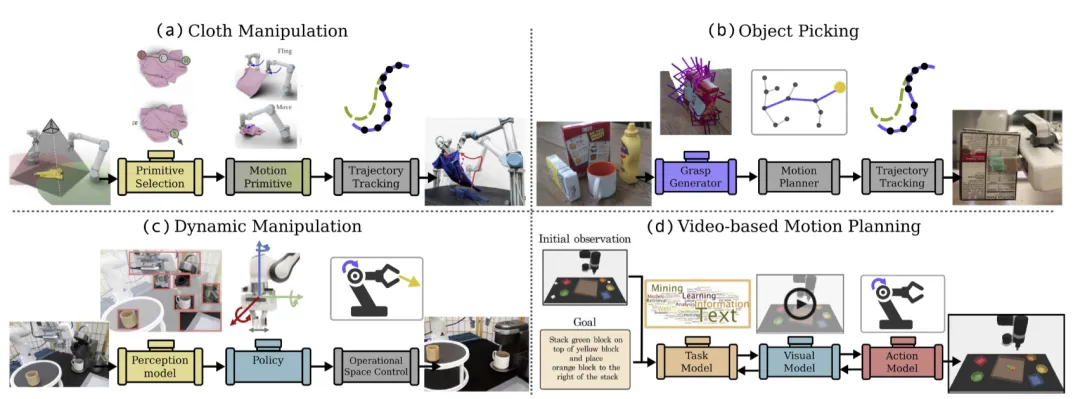
机器人的 "实战应用":深度生成模型能做什么?
深度生成模型已广泛应用于各类机器人任务,从简单的抓取到复杂的场景布置,覆盖了生活和工业的多个领域。
末端执行器姿态生成
这是最基础也最核心的应用之一。机器人的末端执行器(比如机械爪)需要精准的 6 维姿态(3 个位置维度 + 3 个角度维度)才能完成抓取、放置等动作。深度生成模型能根据物体形状、位置,生成最优姿态 ------ 比如为圆形杯子选择包裹式抓取,为扁平盒子选择侧握式抓取。
动作轨迹生成
对于需要连续动作的任务(比如烹饪、焊接),深度生成模型能生成完整的动作轨迹。与传统方法相比,它生成的轨迹更平滑、更符合物理约束,还能根据环境变化动态调整(比如遇到障碍物时自动绕行)。
末端执行器位移生成
位移生成聚焦于 "短时间、高响应" 的动作,比如机械爪的微小调整、手部的快速移动。这类模型生成速度快,能让机器人快速适应环境变化(比如杯子被轻微触碰后,及时调整抓取位置)。
场景布置与 rearrangement
给定任务指令(比如 "把餐桌摆成晚餐模式"),深度生成模型能生成各个物体的目标位置(比如盘子放在桌面中央、杯子在盘子右侧),再由任务规划模块安排机器人的操作顺序,完成整个场景的整理。
关键挑战:让机器人 "举一反三" 的核心难题
虽然深度生成模型表现出色,但要让机器人真正 "学以致用",还需要解决一个关键问题 ------ 泛化能力,也就是在未见过的场景中(比如 "抓取从未见过的水果""在杂乱的新环境中工作")也能正常发挥。研究者们提出了三种核心策略:
模块化组合:像搭积木一样组合技能
与其让机器人学习一个 "万能模型",不如让它掌握多个简单的 "技能模块",遇到复杂任务时,将模块组合起来。比如将 "抓取""搬运""放置" 三个模块组合,就能完成 "取物并放置到指定位置" 的任务。这种方式能让机器人快速适应新任务,无需重新训练。
提取关键特征:忽略干扰,聚焦核心
机器人的观测数据(比如图像、触觉信号)往往包含大量无关信息(比如桌面的花纹、环境的光照变化)。通过提取关键特征(比如物体的形状、位置),能让模型专注于任务本质,避免被干扰信息误导,从而在新场景中保持性能。
利用感知 - 动作对称性:让动作 "跟着物体走"
很多机器人任务存在天然的对称性 ------ 比如杯子向左移动 10 厘米,最优抓取位置也应向左移动 10 厘米。通过将感知信息(比如物体位置)和动作信息(比如抓取位置)映射到同一空间,模型能自动利用这种对称性,在物体位置变化时,快速调整动作,实现泛化。
未来展望:机器人学习的下一站
深度生成模型与机器人的结合仍在快速发展,未来的研究将聚焦于三个核心方向:
长时任务学习
目前机器人大多擅长短时间、单步骤任务,未来需要能处理长时复杂任务(比如独立完成一顿饭的烹饪)。这需要将深度生成模型与语言模型(理解任务步骤)、规划模块(安排操作顺序)结合,实现分层决策。
低成本数据获取
真实机器人的演示数据收集成本高、周期长。未来将更多利用互联网视频(比如人类做饭的视频)、仿真数据(在虚拟环境中生成大量演示),通过跨域迁移技术,让机器人从这些低成本数据中学习技能。
更强的泛化能力
未来的机器人需要适应更多未知场景 ------ 比如从未见过的物体、杂乱的环境、突发的干扰。这需要进一步探索结构化先验(比如利用物理规律)、互联网知识(比如从通用模型中借鉴常识),让机器人真正具备 "举一反三" 的能力。
结语
深度生成模型的出现,让机器人的 "从演示学习" 告别了对完美数据的依赖,变得更灵活、更高效、更贴近真实世界的需求。从简单的抓取到复杂的场景布置,从实验室环境到家庭、工业场景,这项技术正在一步步缩小机器人与人类操作能力的差距。
未来,随着模型性能的提升和数据获取成本的降低,我们或许会看到越来越多的机器人 ------ 它们无需工程师逐行编程,只需观察人类的演示,就能学会各种技能,成为我们生活和工作中的得力助手。而深度生成模型,正是这场机器人革命的核心驱动力。