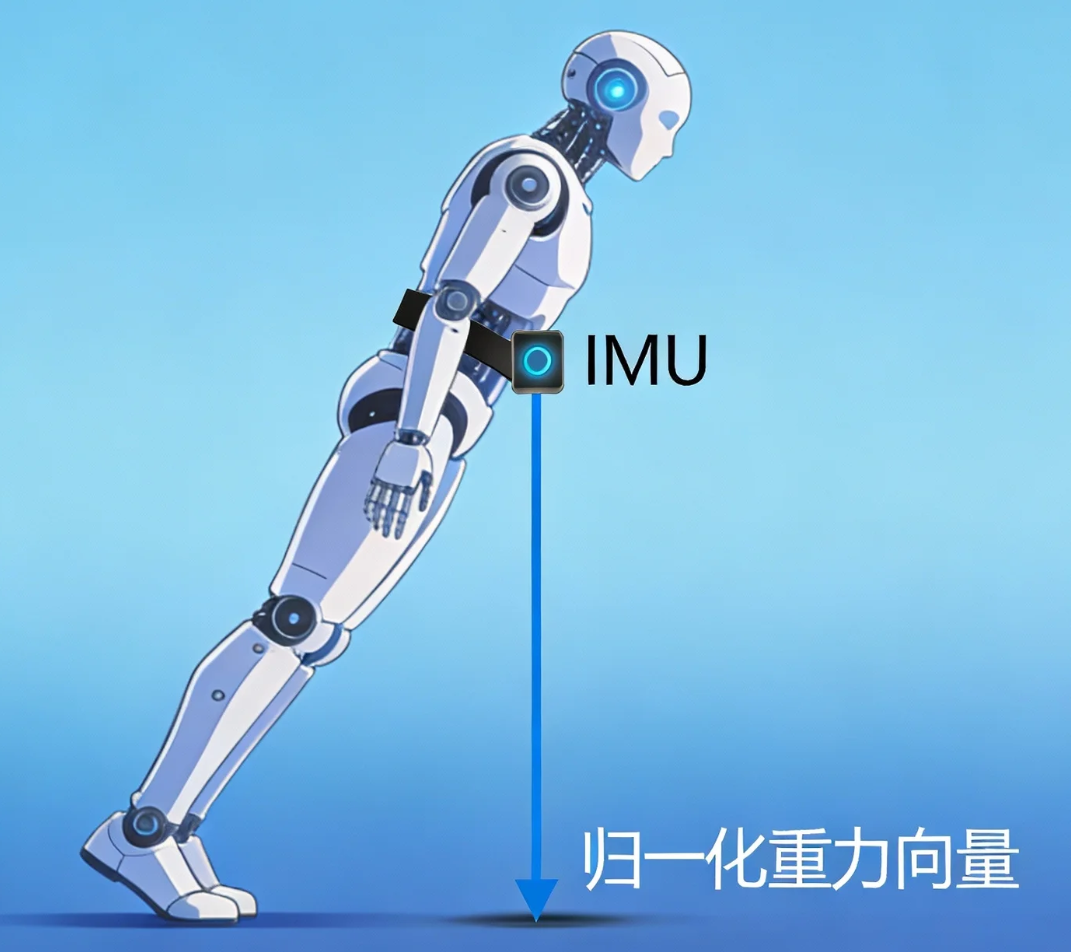
重力投影 (Projected Gravity) 指的是将世界坐标系下的重力向量(通常为 ( 0 , 0 , − 1 ) (0, 0, -1) (0,0,−1) )投影(变换)到机器人的基座坐标系下。
这在强化学习和机器人控制中非常重要,因为 IMU 能够感知相对于自身的重力方向,这直接反映了机器人的倾斜姿态(Roll 和 Pitch)。
1. 为什么要用重力投影
这是人形机器人 RL 中非常关键的设计哲学。相比于欧拉角(Euler Angles)或原始四元数(Quaternion),重力投影向量(Projected Gravity)胜出的原因主要集中在 解耦航向 、避免奇异性 以及 Sim2Real 的友好性。
以下是详细对比分析:
1. 解耦绝对航向------ 最重要的原因
- 问题 :
- 四元数包含了完整的旋转信息(Roll, Pitch, Yaw)。
- 欧拉角也明确包含 Yaw(偏航角)。
- 为何重力投影更好 :
- 人形机器人的运动控制(Locomotion)通常是相对于自身的。无论机器人面朝东方还是北方,只要它的身体倾斜角度相同,它维持平衡的策略应该是一样的。
- 重力投影向量 g b g_b gb 只包含 Roll 和 Pitch 的信息,天然丢失了 Yaw 的绝对信息。
- 好处:这迫使 Policy 学习基于当前朝向的相对控制,而不是过拟合到某个特定的世界坐标系航向(例如:防止机器人学会"只有面朝北边才能走直线"的错误策略)。如果输入完整的四元数,网络往往需要浪费神经元去"遗忘"绝对 Yaw 的影响。
2. 避免"双重覆盖"问题------ 针对四元数
- 问题 :四元数具有双重覆盖特性,即 q q q 和 − q -q −q 代表完全相同的旋转姿态。
- 后果 :如果不做特殊处理,神经网络会面临输入空间的不连续性(虽然物理上连续,但数值上可能瞬间从 q q q 跳变到 − q -q −q),这会导致训练时的 Loss 震荡或难以收敛。虽然可以通过规范化(比如强制 w > 0 w > 0 w>0)来解决,但重力投影天然没有这个问题。
3. 避免万向节死锁与不连续性 ------ 针对欧拉角
- 问题 :欧拉角在 ± π \pm \pi ±π 处存在数值跳变,且在 Pitch 接近 90 度时存在万向节死锁(Gimbal Lock)。
- 后果:神经网络非常讨厌不连续的输入数据。重力投影向量在三维空间中是连续变化的,不存在奇异点,对梯度下降非常友好。
4. Sim2Real 的真实性(物理意义)
- 原理 :IMU 中的加速度计在静止或匀速运动时,测量的就是重力在机体坐标系下的分量。
- 好处 :重力投影向量 g b g_b gb 本质上就是理想状态下的加速度计读数(忽略运动加速度)。直接使用 g b g_b gb 作为观测,使得仿真与真机的观测空间在物理意义上高度一致,减小了 Sim2Real Gap。
5. 降维与特征压缩
- 四元数:4维。
- 欧拉角:3维。
- 重力投影:3维(实际上模长为1,自由度为2)。
- 虽然维度差别不大,但 g b g_b gb 用 3 个数值极其紧凑地表达了"我现在有多歪"这一核心状态,没有冗余信息,有助于 Policy 更快收敛。
一句话总结:
在人形机器人强化学习中,使用重力投影是为了剔除与平衡无关的绝对航向信息 ,并提供一个数值连续、无奇异点且符合传感器物理特性的姿态描述,从而加速训练并提高策略的鲁棒性。
2. 计算理论
数学公式
假设:
- g w g_w gw : 世界坐标系下的重力向量(World Frame)。
- q w b q_{wb} qwb : 从基座坐标系到世界坐标系的旋转四元数(Body to World Quaternion)。
- R w b R_{wb} Rwb : 对应的旋转矩阵。
我们需要求 g b g_b gb(基座坐标系下的重力向量)。
根据坐标变换原理:
g b = R b w ⋅ g w = R w b T ⋅ g w g_b = R_{bw} \cdot g_w = R_{wb}^T \cdot g_w gb=Rbw⋅gw=RwbT⋅gw
使用四元数运算,向量 v v v 经四元数 q q q 旋转得到 v ′ v' v′ 的公式为 v ′ = q v q − 1 v' = q v q^{-1} v′=qvq−1 (或 q v q ∗ q v q^* qvq∗,取决于定义)。在这里我们需要进行逆变换 (从世界到基座),即使用 q w b q_{wb} qwb 的共轭(或逆)来旋转 g w g_w gw:
g b = q w b − 1 ⊗ g w ⊗ q w b g_b = q_{wb}^{-1} \otimes g_w \otimes q_{wb} gb=qwb−1⊗gw⊗qwb
2. IsaacLab 实现分析
代码位置
- 文件 :
source/isaaclab/isaaclab/assets/articulation/articulation_data.py
代码实现
python
@property
def projected_gravity_b(self):
"""Projection of the gravity direction on base frame. Shape is (num_instances, 3)."""
return math_utils.quat_apply_inverse(self.root_link_quat_w, self.GRAVITY_VEC_W)变量说明:
self.root_link_quat_w: 基座在世界坐标系下的姿态四元数 ( q w b q_{wb} qwb),格式为(w, x, y, z)。self.GRAVITY_VEC_W: 世界坐标系下的重力方向向量,在__init__中初始化,归一化为(0, 0, -1)。
核心函数 math_utils.quat_apply_inverse,位于 source/isaaclab/isaaclab/utils/math.py:
python
def quat_apply_inverse(quat: torch.Tensor, vec: torch.Tensor) -> torch.Tensor:
# ... (省略形状处理)
# 提取虚部 xyz
xyz = quat[:, 1:]
# 计算中间变量 t
t = xyz.cross(vec, dim=-1) * 2
# 应用逆旋转公式 (对应于 q^-1 * v * q)
return (vec - quat[:, 0:1] * t + xyz.cross(t, dim=-1)).view(shape)分析 :
IsaacLab 使用了 PyTorch 进行批量化 (Batch) 计算。quat_apply_inverse 实现了四元数逆旋转的高效代数形式(避免了构建旋转矩阵的开销)。它本质上就是计算 g b = q w b − 1 ⋅ g w g_b = q_{wb}^{-1} \cdot g_w gb=qwb−1⋅gw。
3. 宇树的实现分析
代码位置
- 文件 :
unitree_articulation.h(仓库地址) - 依赖: Eigen 库
代码实现
cpp
// 1. 构建四元数 (Eigen库 w在首位)
data.root_quat_w = Eigen::Quaternionf(
lowstate->msg_.imu_state().quaternion()[0], // w
lowstate->msg_.imu_state().quaternion()[1], // x
lowstate->msg_.imu_state().quaternion()[2], // y
lowstate->msg_.imu_state().quaternion()[3] // z
);
// 2. 计算投影重力
data.projected_gravity_b = data.root_quat_w.conjugate() * data.GRAVITY_VEC_W;分析:
- 数据源 : 直接读取真实的 IMU 数据 (
lowstate->msg_.imu_state())。 - 四元数构建 : 使用
Eigen::Quaternionf构建 q w b q_{wb} qwb。 - 计算逻辑 :
data.root_quat_w.conjugate()得到 q w b ∗ q_{wb}^* qwb∗ (即 q w b − 1 q_{wb}^{-1} qwb−1,假设是单位四元数)。 - 旋转操作 : 在 Eigen 中,
q * v运算符重载表示用四元数 q q q 旋转向量 v v v。因此q.conjugate() * v等价于将向量从世界系旋转回基座系。
注意,Isaaclab和宇树仓库两者的计算逻辑在数学上是等价的。