引言:今天的学习围绕"图像特征提取"展开,从传统的图像形态学操作,到精准的Sobel边缘检测,再到深度学习中CNN的核心逻辑,我们一步步揭开了计算机"看懂"图像的底层原理。传统算法是深度学习的基础,而深度学习是传统算法的进阶------比如CNN的浅层,本质就是在做类似传统算法的简单特征提取。这篇文章将完整梳理今天的讨论内容,包含所有核心知识点和可直接运行的代码,帮你建立从传统到深度学习的完整知识链路。
一、基础铺垫:图像形态学操作(腐蚀/膨胀/开运算等)
图像形态学是基于图像形状的基础处理技术,核心是通过"结构元件(Kernel)"对图像进行操作,提取图像的轮廓、平滑噪声、修复缺陷等。常见操作包括腐蚀、膨胀、开运算、闭运算、梯度运算、顶帽和黑帽,这些操作都是后续复杂特征提取的基础。
1. 核心形态学操作原理
-
腐蚀 :收缩图像中的亮区域,消除小的亮噪点。函数:
cv2.erode(src, kernel, iterations),迭代次数越多,腐蚀效果越明显。 -
膨胀 :扩张图像中的亮区域,填补小的暗孔洞。函数:
cv2.dilate(src, kernel, iterations),与腐蚀是互补操作。 -
开运算 :先腐蚀后膨胀,作用是平滑轮廓、断开窄狭颈、消除细突出物(适合去噪)。函数:
cv2.morphologyEx(src, cv2.MORPH_OPEN, kernel)。 -
闭运算 :先膨胀后腐蚀,作用是弥合窄间断、消除小孔洞、填补轮廓断裂(适合修复缺陷)。函数:
cv2.morphologyEx(src, cv2.MORPH_CLOSE, kernel)。 -
梯度运算 :膨胀结果 - 腐蚀结果,突出图像强度变化剧烈的区域(即边缘)。函数:
cv2.morphologyEx(src, cv2.MORPH_GRADIENT, kernel)。 -
顶帽/黑帽 :顶帽=原始图像-开运算结果(提取亮细节);黑帽=闭运算结果-原始图像(提取暗细节)。函数分别对应
cv2.MORPH_TOPHAT和cv2.MORPH_BLACKHAT。
2. 完整可运行代码
python
#---------图像形态学---------
# 1、图像腐蚀,函数为:
# cv2.erode(src, kernel, dst, anchor, iterations, borderType, borderValue)
# src: 输入的图像
# kernel: 用于腐蚀的结构元件,其形状和大小直接影响腐蚀的效果
# dst: 与src相同大小和类型的输出图像
# iterations: 腐蚀操作的迭代次数,默认为1;次数越多,腐蚀效果越明显
# 2、图像膨胀,函数为:
# cv2.dilate(img, kernel, iterations)
# 参数含义:
# img - 目标图片
# kernel - 进行操作的内核,默认为3×3的矩阵
# iterations - 膨胀次数,默认为1
# 3、开运算
# 开运算:先腐蚀后膨胀。作用:平滑物体的轮廓、断开较窄的狭颈并消除细的突出物。
# 闭运算:先膨胀后腐蚀。作用:弥合较窄的间断和细长的沟壑,消除小的孔洞,填补轮廓线中的断裂。
import numpy as np
import cv2
# 仅补充必要的导入(唯一修复:让代码能运行)
import cv2
import numpy as np
# # 1、图像腐蚀
# sun = cv2.imread("taiyang.png")
# cv2.imshow('src', sun)
# cv2.waitKey(0)
# i=5
# erosion_={}
# while i<100:
# i+=10
# kernel = np.ones((i, i), np.uint8)
#
# erosion_[i] = cv2.erode(sun, kernel, iterations=2)
# cv2.imshow(f'erosion_{i}', erosion_[i])
# cv2.waitKey(0)
# # 2、图像膨胀
# wenzi = cv2.imread('wenzi.png')
# cv2.imshow('src1', wenzi)
# cv2.waitKey(0)
# kernel = np.ones((4, 2), np.uint8)
# wenzi_new = cv2.dilate(wenzi, kernel, iterations=2)
# cv2.imshow('wenzi_new', wenzi_new)
# cv2.waitKey(0)
#
# # 3、开运算(先腐蚀后膨胀)
# zhiwen = cv2.imread('zhiwen(zaosheng).png')
# cv2.imshow('src2', zhiwen)
# cv2.waitKey(0)
# kernel = np.ones((2, 6), np.uint8)
# zhiwen_new = cv2.morphologyEx(zhiwen, cv2.MORPH_OPEN, kernel)
# cv2.imshow('zhiwen_new', zhiwen_new)
# cv2.waitKey(0)
#
# # 4、闭运算(先膨胀后腐蚀)
# zhiwen_duan = cv2.imread('zhiwen_duan.png')
# cv2.imshow('src3', zhiwen_duan)
# cv2.waitKey(0)
# kernel = np.ones((4, 7), np.uint8)
# zhiwen_new1 = cv2.morphologyEx(zhiwen_duan, cv2.MORPH_CLOSE, kernel)
# cv2.imshow('zhiwen_new1', zhiwen_new1)
# cv2.waitKey(0)
#
# # 释放所有窗口资源
# cv2.destroyAllWindows()
# 4、梯度运算: 膨胀-腐蚀 作用:突出显示图像中强度变化剧烈的地方
wenzi = cv2.imread('wenzi.png')
cv2.imshow( 'wenzi',wenzi)
cv2.waitKey(0)
kernel = np.ones( (2,2),np.uint8) #设置kenenel大小
# 膨胀
pz_wenzi=cv2.dilate(wenzi,kernel,iterations=1)
cv2.imshow( 'pz_wenzi',pz_wenzi)
cv2.waitKey(0)
#腐蚀
fs_wenzi=cv2.erode(wenzi,kernel,iterations=1)
cv2.imshow( 'fs_wenzi',fs_wenzi)
cv2.waitKey(0)
# 膨胀-腐蚀
bianyuan = cv2.morphologyEx(wenzi,cv2.MORPH_GRADIENT,kernel)
cv2.imshow( 'bianyuan',bianyuan)
cv2.waitKey(0)
# 5、顶帽和黑帽
# 顶帽 = 原始图像 - 开运算结果(先腐蚀后膨胀) 用于提取比周围区域亮的细节。
# 黑帽 = 闭运算(先膨胀后腐蚀) - 原始图像 用于提取比周围区域暗的细节。
sun = cv2.imread('taiyang.png')
cv2.imshow( 'sun_yuantu',sun)
cv2.waitKey(0)
kernel = np.ones( (2,2),np.uint8) #设置kenenel大小
#开运算
open_sun=cv2.morphologyEx(sun,cv2.MORPH_OPEN,kernel)
cv2.imshow( 'open_sun',open_sun)
cv2.waitKey(0)
#顶帽
tophat = cv2.morphologyEx(sun,cv2.MORPH_TOPHAT,kernel)
cv2.imshow( 'TOPHAT',tophat)
cv2.waitKey(0)
#闭运算
close_sun=cv2.morphologyEx(sun,cv2.MORPH_CLOSE,kernel)
cv2.imshow( 'close_sun',close_sun)
cv2.waitKey(0)
#黑帽
blackhat = cv2.morphologyEx(sun,cv2.MORPH_BLACKHAT,kernel)
cv2.imshow( 'BLACKHAT',blackhat)
cv2.waitKey(0)
cv2.destroyAllWindows()运行结果: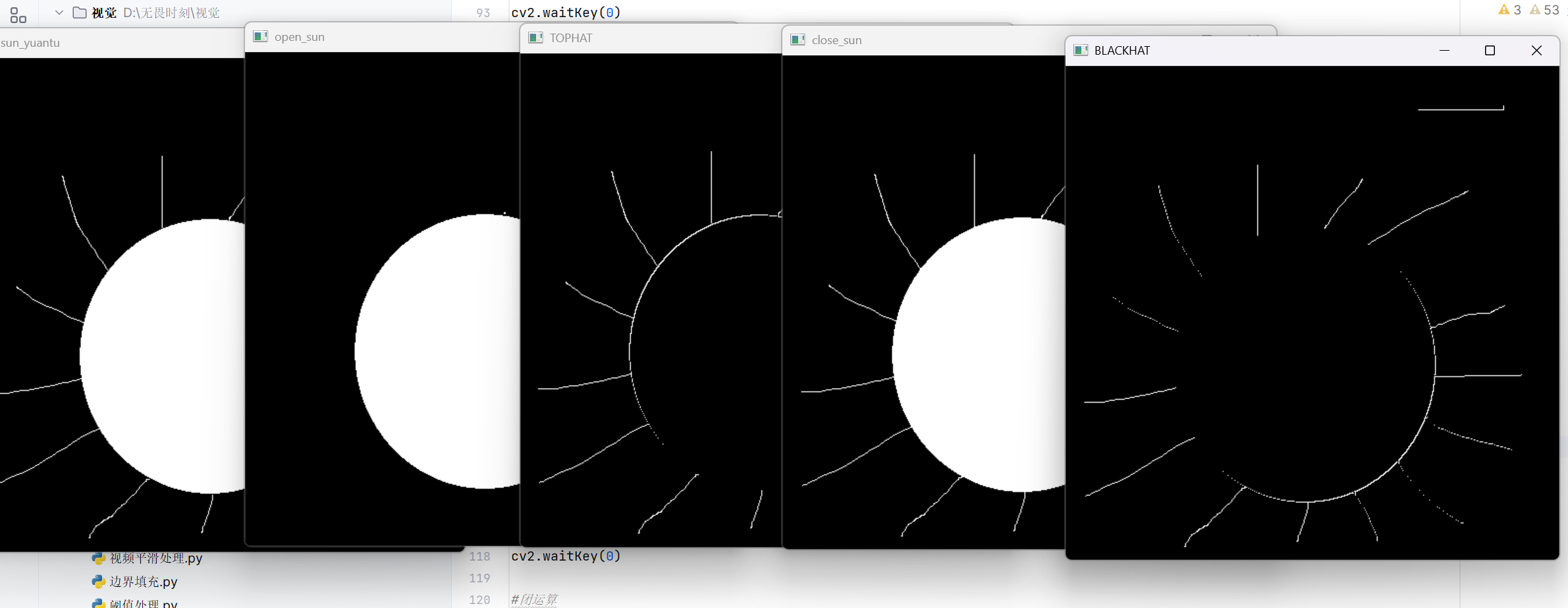
二、进阶提取:Sobel算子实现精准边缘检测
形态学的梯度运算能提取边缘,但精度有限。Sobel算子是更常用的边缘检测工具,核心是通过卷积计算图像像素的梯度,梯度越大,边缘越明显。它能分别检测X(垂直)和Y(水平)方向的边缘,是后续深度学习特征提取的"传统原型"。
1. Sobel算子核心知识点
(1)核心函数与参数
函数:cv2.Sobel(src, ddepth, dx, dy, ksize)
-
src:输入图像(建议灰度图,减少计算量)。 -
ddepth:输出图像深度(关键坑点!):-
原图像默认是
uint8(0-255),梯度计算会产生负数(如右边缘、下边缘)。 -
若设
ddepth=-1(与原图像同深度),负数会被截断为0,丢失一半边缘。 -
正确做法:设
ddepth=cv2.CV_64F(保存负数),再用cv2.convertScaleAbs()转绝对值,恢复完整边缘。
-
-
dx/dy:梯度方向,dx=1, dy=0检测垂直边缘,dx=0, dy=1检测水平边缘(不建议同时设为1,效果差)。 -
ksize:算子核大小,必须是1、3、5、7,默认3。
(2)正确组合X/Y方向边缘
不建议直接设dx=1, dy=1(边缘模糊),应分别计算X/Y方向边缘后,用cv2.addWeighted()加权融合(等权重融合效果最佳)。
2. 完整可运行代码(含错误示范与正确实现)
python
#''''''---------边缘检测---------''''''
# sobel算子
# cv2.Sobel(src, ddepth, dx, dy[, ksize[, scale[, delta[, borderType]]]])
# 参数:
# src: 输入图像
# ddepth: 输出图像的深度(可以理解为数据类型),-1表示与原图像相同的深度
# dx, dy: 当组合为dx=1,dy=0时求x方向的一阶导数,当组合为dx=0,dy=1时求y方向的一阶导数(如果同时为1,通常效果不佳)
# ksize:(可选参数)Sobel算子的大小,必须是1,3,5或者7,默认为3。
# 读取原始图像
import cv2
yuan = cv2.imread('img_3.png')
# 显示原始图像
cv2.imshow('yuan',yuan)
cv2.waitKey(0)
# ## x方向上的边缘
# 计算x方向Sobel边缘(使用原图像深度)
yuan_x = cv2.Sobel(yuan,-1,dx=1,dy=0)
# 显示x方向边缘
cv2.imshow('yuan_x', yuan_x)
cv2.waitKey(0)
# x方向上的边缘,包括负数信息(右端),但显示不出来,因为范围是(0~255)
# 计算x方向Sobel边缘(指定深度为float64,可保存负数)
yuan_x_64 = cv2.Sobel(yuan,cv2.CV_64F,dx=1,dy=0)#默认uint8改为float64,可保存负数
# 显示含负数的x方向边缘(此时显示异常,因为超出0-255范围)
cv2.imshow('yuan_x_64', yuan_x_64)
cv2.waitKey(0)
# ## x方向上的边缘,包括负数信息,进行取绝对值的操作,右端的负值信息就可以显示出来了
# 将含负数的边缘结果转为绝对值(负数转正数)
yuan_x_full = cv2.convertScaleAbs(yuan_x_64)#转换为绝对值,负数转换为正数
# 显示处理后的x方向完整边缘
cv2.imshow('yuan_x_full', yuan_x_full)
cv2.waitKey(0)
# ## y方向上的边缘
# 计算y方向Sobel边缘(使用原图像深度)
yuan_y = cv2.Sobel(yuan,-1,dx=0,dy=1)
# 显示y方向边缘
cv2.imshow('yuan_y', yuan_y)
cv2.waitKey(0)
# y方向上的边缘,包括负数信息(下端),但显示不出来,因为范围是(0~255)
# 计算y方向Sobel边缘(指定深度为float64,可保存负数)
yuan_y_64 = cv2.Sobel(yuan,cv2.CV_64F,dx=0,dy=1)#默认int8改为float64,可保存负数
# 将含负数的y方向边缘结果转为绝对值
yuan_y_full = cv2.convertScaleAbs(yuan_y_64)#转换为绝对值,负数转换为正数
# 显示处理后的y方向完整边缘
cv2.imshow('yuan_y_full', yuan_y_full)
cv2.waitKey(0)
# ##如果同时使用x,y方向的结果如何呢?(不建议使用!)
# 同时计算x、y方向Sobel边缘(不建议的方式)
yuan_xy = cv2.Sobel(yuan,-1,dx=1,dy=1)
# 显示同时计算的边缘结果
cv2.imshow('yuan_xy', yuan_xy)
cv2.waitKey(0)
# ##使用图像加权运算组合x和y方向的2个边缘。
# 加权融合x、y方向的完整边缘(权重均为1,gamma为0)
yuan_xy_full = cv2.addWeighted(yuan_x_full, 1,yuan_y_full, 1,0)
# 显示融合后的完整边缘
cv2.imshow('yuan_xy_full', yuan_xy_full)
cv2.waitKey(0)运行结果: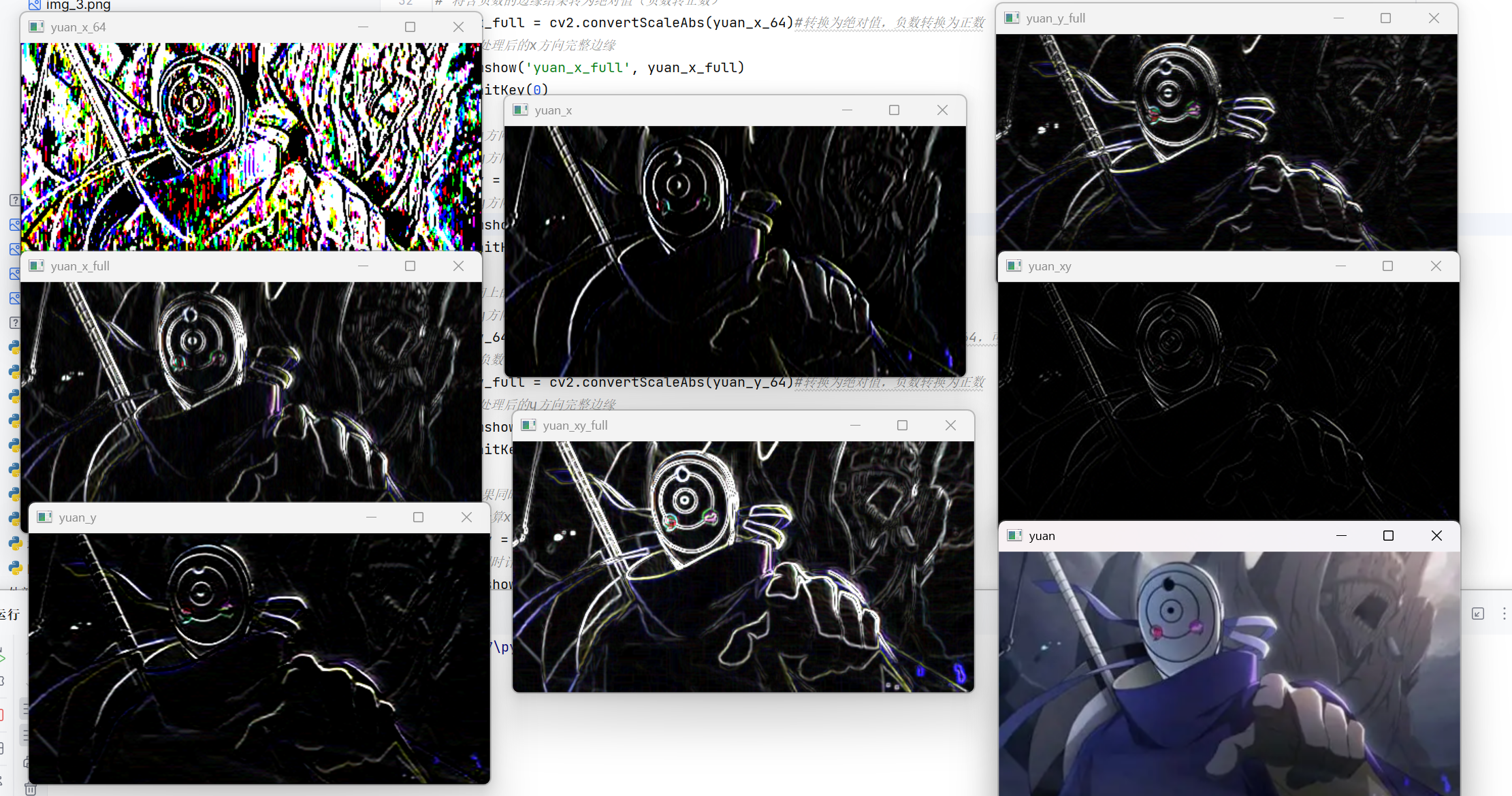
三、核心关联:Sobel算子与CNN浅层的本质相通
学习完传统边缘检测后,我们很容易发现:Sobel算子的核心逻辑,和深度学习中CNN(卷积神经网络)浅层卷积层的作用高度一致。理解这层关联,就能彻底搞懂CNN"自动提取特征"的本质------它不是凭空创造的,而是传统算法的"数据驱动进阶版"。
1. 核心相通点:都是"卷积运算提取局部特征"
不管是Sobel算子还是CNN卷积层,核心操作都是卷积:用一个小的"核(Kernel)"在图像上滑动,通过"逐元素相乘再求和"提取局部特征。
-
Sobel算子:人工设计的"固定权重核",专门提取边缘(比如X方向核为\[-1,0,1,-2,0,2,-1,0,1]),权重固定不变,对所有图像都用同一套逻辑。
-
CNN浅层卷积层:数据驱动的"可学习权重核",通过训练数据和反向传播学习最优权重。训练后会发现,这些核的权重分布和Sobel等传统算子高度相似,专门提取边缘、线条等简单特征。
2. 关键区别:固定核 vs 可学习核
| 对比维度 | Sobel算子 | CNN浅层卷积层 |
|---|---|---|
| 权重来源 | 人工设计,固定不变 | 数据驱动,训练学习 |
| 特征多样性 | 仅能提取边缘(X/Y方向) | 可学习边缘、斜线、纹理等多种简单特征 |
| 自适应能力 | 泛化性差,对所有图像同套逻辑 | 泛化性强,针对具体任务学最优权重 |
| 后续处理 | 需手动设计后续逻辑 | 搭配ReLU激活、池化层,增强特征表达 |
四、总结:图像特征提取的演化逻辑
今天的学习从传统算法到深度学习,梳理出了图像特征提取的完整演化脉络:
基础层(形态学):通过腐蚀、膨胀等简单操作,完成图像的初步预处理(去噪、修复),提取最基础的轮廓特征,为后续精准提取打基础。
进阶层(Sobel边缘检测):通过人工设计的卷积核,实现更精准的边缘提取,解决形态学梯度运算精度不足的问题,是传统特征提取的核心工具。
深度学习层(CNN):将传统算法的"人工设计核"升级为"数据驱动可学习核",浅层提取类似Sobel的简单特征,中层组合成复杂特征(如部件),深层形成完整物体特征,实现端到端的自动特征提取。
核心结论:深度学习不是"黑箱魔法",而是传统算法的合理演化。理解Sobel与CNN的关联,就能跳出"死记知识点"的误区,真正掌握图像特征提取的本质。
小思考:如果用今天学的形态学开运算+Sobel边缘检测,处理一张带噪声的工业零件图像,能达到什么效果?欢迎在评论区交流实践心得~