Unity 的AI Navigation 系统 (2022.2 及以上版本通过 AI Navigation 包实现)可让角色在游戏世界智能导航,核心基于自动生成的导航网格(NavMesh) ,支持动态障碍物 实时调整导航、OffMesh Link 实现跳跃 / 开门等特殊动作,关键组件包括 NavMesh Agent(角色导航)、NavMesh Surface(NavMesh 生成)等,通过A * 算法 实现路径查找,结合RVO进行障碍物规避,还可通过区域成本、Area Mask 等配置优化导航逻辑,同时提供了从旧版导航系统升级、组件配置、脚本开发(如点击移动、巡逻)等完整使用指南。
2. 思维导图(mindmap)
预览
查看代码
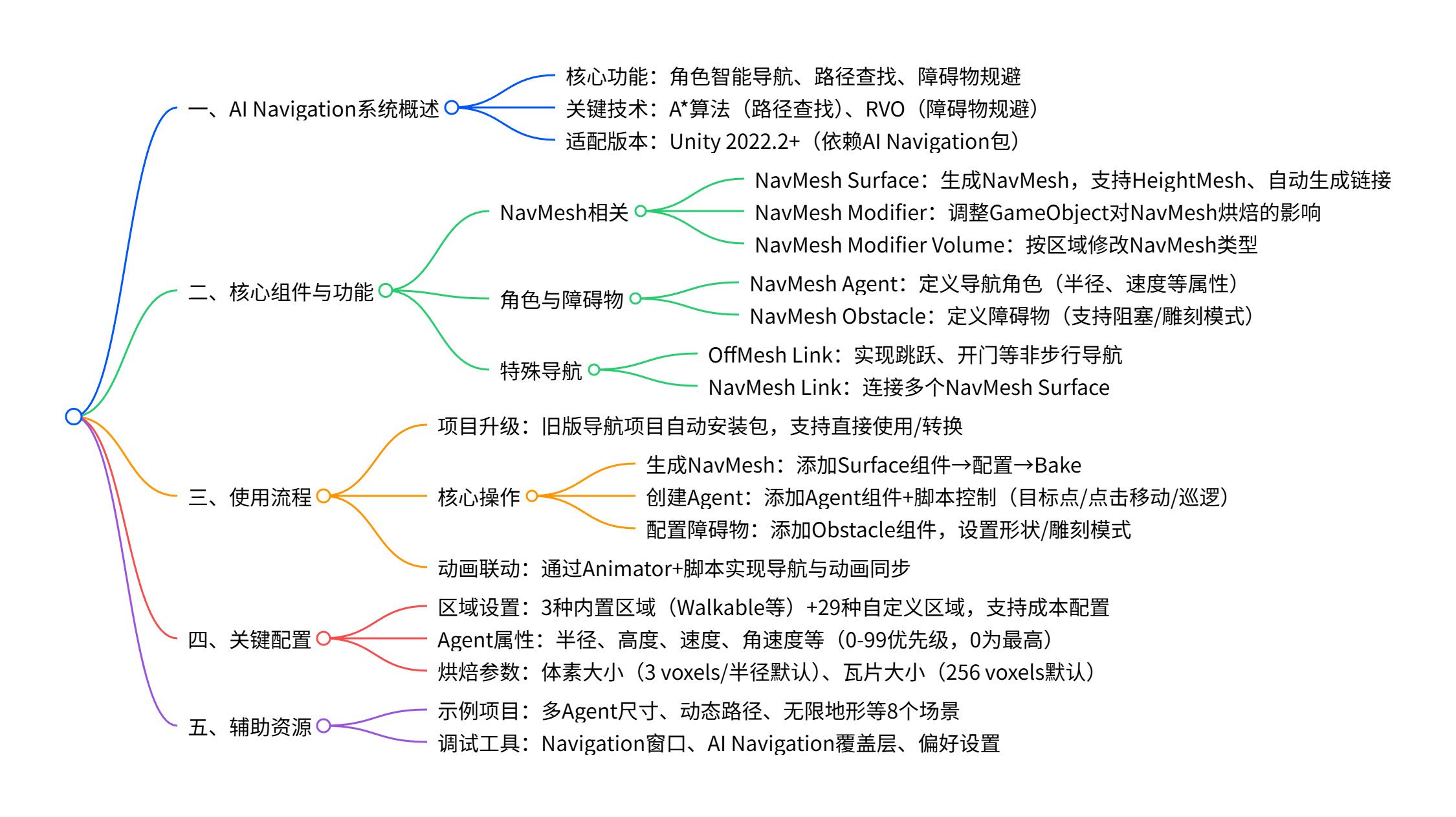
配置障碍物:添加Obstacle组件,设置形状/雕刻模式
创建Agent:添加Agent组件+脚本控制(目标点/点击移动/巡逻)
生成NavMesh:添加Surface组件→配置→Bake
NavMesh Link:连接多个NavMesh Surface
OffMesh Link:实现跳跃、开门等非步行导航
NavMesh Obstacle:定义障碍物(支持阻塞/雕刻模式)
NavMesh Agent:定义导航角色(半径、速度等属性)
NavMesh Modifier Volume:按区域修改NavMesh类型
NavMesh Modifier:调整GameObject对NavMesh烘焙的影响
NavMesh Surface:生成NavMesh,支持HeightMesh、自动生成链接
调试工具:Navigation窗口、AI Navigation覆盖层、偏好设置
示例项目:多Agent尺寸、动态路径、无限地形等8个场景
烘焙参数:体素大小(3 voxels/半径默认)、瓦片大小(256 voxels默认)
Agent属性:半径、高度、速度、角速度等(0-99优先级,0为最高)
区域设置:3种内置区域(Walkable等)+29种自定义区域,支持成本配置
动画联动:通过Animator+脚本实现导航与动画同步
核心操作
项目升级:旧版导航项目自动安装包,支持直接使用/转换
特殊导航
角色与障碍物
NavMesh相关
适配版本:Unity 2022.2+(依赖AI Navigation包)
关键技术:A*算法(路径查找)、RVO(障碍物规避)
核心功能:角色智能导航、路径查找、障碍物规避
五、辅助资源
四、关键配置
三、使用流程
二、核心组件与功能
一、AI Navigation系统概述
配置障碍物:添加Obstacle组件,设置形状/雕刻模式
创建Agent:添加Agent组件+脚本控制(目标点/点击移动/巡逻)
生成NavMesh:添加Surface组件→配置→Bake
NavMesh Link:连接多个NavMesh Surface
OffMesh Link:实现跳跃、开门等非步行导航
NavMesh Obstacle:定义障碍物(支持阻塞/雕刻模式)
NavMesh Agent:定义导航角色(半径、速度等属性)
NavMesh Modifier Volume:按区域修改NavMesh类型
NavMesh Modifier:调整GameObject对NavMesh烘焙的影响
NavMesh Surface:生成NavMesh,支持HeightMesh、自动生成链接
调试工具:Navigation窗口、AI Navigation覆盖层、偏好设置
示例项目:多Agent尺寸、动态路径、无限地形等8个场景
烘焙参数:体素大小(3 voxels/半径默认)、瓦片大小(256 voxels默认)
Agent属性:半径、高度、速度、角速度等(0-99优先级,0为最高)
区域设置:3种内置区域(Walkable等)+29种自定义区域,支持成本配置
动画联动:通过Animator+脚本实现导航与动画同步
核心操作
项目升级:旧版导航项目自动安装包,支持直接使用/转换
特殊导航
角色与障碍物
NavMesh相关
适配版本:Unity 2022.2+(依赖AI Navigation包)
关键技术:A*算法(路径查找)、RVO(障碍物规避)
核心功能:角色智能导航、路径查找、障碍物规避
五、辅助资源
四、关键配置
三、使用流程
二、核心组件与功能
一、AI Navigation系统概述

## 一、AI Navigation系统概述
- 核心功能:角色智能导航、路径查找、障碍物规避
- 关键技术:A*算法(路径查找)、RVO(障碍物规避)
- 适配版本:Unity 2022.2+(依赖AI Navigation包)
## 二、核心组件与功能
- NavMesh相关
- NavMesh Surface:生成NavMesh,支持HeightMesh、自动生成链接
- NavMesh Modifier:调整GameObject对NavMesh烘焙的影响
- NavMesh Modifier Volume:按区域修改NavMesh类型
- 角色与障碍物
- NavMesh Agent:定义导航角色(半径、速度等属性)
- NavMesh Obstacle:定义障碍物(支持阻塞/雕刻模式)
- 特殊导航
- OffMesh Link:实现跳跃、开门等非步行导航
- NavMesh Link:连接多个NavMesh Surface
## 三、使用流程
- 项目升级:旧版导航项目自动安装包,支持直接使用/转换
- 核心操作
- 生成NavMesh:添加Surface组件→配置→Bake
- 创建Agent:添加Agent组件+脚本控制(目标点/点击移动/巡逻)
- 配置障碍物:添加Obstacle组件,设置形状/雕刻模式
- 动画联动:通过Animator+脚本实现导航与动画同步
## 四、关键配置
- 区域设置:3种内置区域(Walkable等)+29种自定义区域,支持成本配置
- Agent属性:半径、高度、速度、角速度等(0-99优先级,0为最高)
- 烘焙参数:体素大小(3 voxels/半径默认)、瓦片大小(256 voxels默认)
## 五、辅助资源
- 示例项目:多Agent尺寸、动态路径、无限地形等8个场景
- 调试工具:Navigation窗口、AI Navigation覆盖层、偏好设置3. 详细总结
一、系统基础信息
- 核心定位:Unity 的 AI Navigation 系统用于实现游戏角色(Agent)在 3D 场景中的智能导航,通过导航网格(NavMesh)、路径查找算法和障碍物规避逻辑,让角色自主移动至目标点。
- 依赖与适配 :
- 适配版本:Unity 2022.2 及以上
- 核心依赖:AI Navigation 包(旧版导航项目升级时自动安装)
- 关键技术 :
- 路径查找:A*(A star)算法,基于 NavMesh 的凸多边形节点网络计算最短路径
- 障碍物规避:RVO(Reciprocal Velocity Obstacles)算法,预测并避免与其他 Agent / 障碍物碰撞
二、AI Navigation 包核心更新(版本 1.1.1)
| 更新类型 | 具体内容 |
|---|---|
| 新增功能 | 1. NavMesh Surface 支持烘焙 HeightMesh;2. NavMesh Surface 支持自动生成链接;3. NavMesh Surface 新增仅使用带 NavMesh Modifier 的源对象;4. NavMesh Modifier 支持作用于子对象 |
| 界面调整 | 1. 仅安装包后显示 Navigation 窗口;2. 移除 Navigation 窗口的 Bake 和 Object 标签(移至 Navigation (Obsolete) 窗口);3. 静态编辑器标志下拉菜单移除 Navigation Static 和 OffMesh Link Generation 选项 |
| 其他优化 | 改进部分示例项目,提供完整更新日志 |
三、项目升级与迁移
- 旧项目兼容 :
- 自动安装:使用旧版导航功能的项目升级至 Unity 2022.2 + 后,自动安装 AI Navigation 包
- 三种选择:直接沿用旧项目配置、转换为新版包、移除旧组件脚本(避免冲突)
- 项目转换步骤 :
- 打开 Window > AI > NavMesh Updater
- 选择要转换的数据类型
- 点击 Initialize Converters 检测数据
- 选择目标数据,点击 Convert Assets 完成转换
- Agent 类型创建与分配 :
- 新建步骤:Window > AI > Navigation → Agents 标签 → 添加并配置参数
- 分配对象:NavMeshSurfaces 和对应的 NavMeshAgents
四、核心组件详解
(1)NavMesh 相关组件
| 组件名称 | 核心功能 | 关键参数 |
|---|---|---|
| NavMesh Surface | 定义 Walkable 区域并烘焙 NavMesh | 1. Agent Type(关联导航角色类型);2. Default Area(默认区域类型);3. Use Geometry(Render Meshes/Physics Colliders);4. 高级参数:体素大小(默认 3 voxels / 半径)、瓦片大小(默认 256 voxels) |
| NavMesh Modifier | 调整 GameObject 对 NavMesh 烘焙的影响 | 1. Mode(Add/Remove Object);2. Apply to Children(是否作用于子对象);3. Override Area(修改区域类型) |
| NavMesh Modifier Volume | 按区域修改 NavMesh 类型 | 1. Size/Center(定义区域范围);2. Area Type(目标区域类型);3. Affected Agents(作用的 Agent 类型) |
(2)角色与障碍物组件
- NavMesh Agent :
- 核心作用:定义可导航的角色,处理路径查找和移动控制
- 关键属性:
- 基础属性:半径(默认 0.5)、高度(默认 2)、Base Offset(碰撞 cylinder 偏移)
- 运动属性:Speed(最大速度)、Angular Speed(角速度)、Acceleration(加速度)、Stopping Distance(停止距离)
- 规避属性:Radius(碰撞半径)、Height(高度间隙)、Quality(规避质量)、Priority(优先级:0-99,0 最高)
- 路径属性:Area Mask(可导航区域)、Auto Repath(是否自动重新路径)、Auto Traverse OffMesh Link(是否自动 traversal 链接)
- NavMesh Obstacle :
- 核心作用:定义 Agent 需规避的障碍物(如箱子、车辆)
- 两种模式:
- 阻塞模式(Carve 禁用):类似 Collider,Agent 近距离碰撞规避
- 雕刻模式(Carve 启用):静止时在 NavMesh 上雕刻孔洞,移动时转为阻塞
- 关键参数:Shape(Box/Capsule)、Move Threshold(移动阈值)、Carving Time To Stationary(静止雕刻延迟)
(3)特殊导航组件
| 组件名称 | 核心功能 | 关键参数 |
|---|---|---|
| OffMesh Link | 实现非步行导航(跳跃、开门等) | 1. Start/End(链接起点 / 终点);2. Bi-Directional(是否双向);3. Cost Override(路径成本覆盖);4. Navigation Area(区域类型) |
| NavMesh Link | 连接多个 NavMesh Surface | 1. Agent Type(匹配的 Agent 类型);2. Start/End Point(链接点);3. Bidirectional(双向导航) |
五、导航核心逻辑
- NavMesh 生成 :
- 基于场景几何结构,自动检测 Agent 可站立的位置,生成凸多边形组成的导航网格
- 烘焙步骤:选择场景几何→添加 NavMesh Surface→配置参数→点击 Bake
- 路径查找流程 :
- 将起点和终点映射到最近的 NavMesh 多边形节点
- 使用 A * 算法遍历相邻节点,生成从起点到终点的多边形序列(走廊)
- Agent 沿走廊的可见拐角转向移动
- 障碍物规避与动态调整 :
- 动态障碍物:通过 RVO 算法预测碰撞,调整 Agent 速度和方向
- 静态障碍物:通过 NavMesh 雕刻(Carve)在网格上创建孔洞,修改导航路径
- 区域与成本控制 :
- 区域类型:3 种内置(Walkable/Not Walkable/Jump)+29 种自定义
- 成本机制:区域成本 × 距离 = 路径总成本,A * 算法优先选择低成本路径(成本需 > 1.0)
- Area Mask:Agent 可指定仅导航特定区域(如人类可通过门,僵尸不可)
六、常用脚本与功能实现
| 功能需求 | 核心脚本 | 关键代码逻辑 |
|---|---|---|
| 目标点移动 | MoveTo.cs | 读取 NavMeshAgent 组件,设置 agent.destination = 目标位置 |
| 鼠标点击移动 | MoveToClickPoint.cs | 监听鼠标点击→射线检测场景→设置 agent.destination = 点击点 |
| 巡逻移动 | Patrol.cs | 定义巡逻点数组→循环设置目标点→距离小于 0.5f 时切换下一个点 |
| 导航与动画联动 | ClickToMove.cs+LocomotionSimpleAgent.cs | 1. 点击设置导航目标;2. 传递 Agent 速度到 Animator;3. 同步角色位置与 Agent 位置 |
七、辅助工具与资源
- 调试工具 :
- Navigation 窗口:配置 Agent 类型、区域成本
- AI Navigation 覆盖层:显示 NavMesh、Agent 路径、障碍物等调试信息
- 偏好设置:调整 NavMesh 显示透明度、HeightMesh 颜色等
- 示例项目:共 8 个核心示例,包括多 Agent 尺寸、动态路径(Drop Plank)、无限地形(Sliding Window Infinite)、Height Mesh 楼梯导航等
- 术语表:关键术语包括 Animation Blend Tree(动画混合树)、Rigidbody(刚体)、Root Motion(根运动)、NavMesh(导航网格)等
4. 关键问题
问题 1:Unity AI Navigation 系统中,NavMesh Obstacle 的两种工作模式(阻塞 / 雕刻)有何区别,分别适用于什么场景?
答案:
- 阻塞模式(Carve 禁用):默认模式,类似 Collider 组件,Agent 仅在近距离时通过基础碰撞规避逻辑避开障碍物,规避半径短、逻辑简单。适用于持续移动的动态障碍物(如玩家控制的角色、行驶的车辆)。
- 雕刻模式(Carve 启用):静止时在 NavMesh 上雕刻孔洞,修改导航网格;移动时转为阻塞模式。Agent 可通过路径查找绕开障碍物,适用于可移动但常静止的障碍物(如可推动的箱子、爆炸后移动的 barrels),需注意开启后会增加 CPU 开销,可通过 Move Threshold 和 Carving Time To Stationary 参数优化。
问题 2:旧版 Unity 导航项目升级至 2022.2 + 后,如何平稳迁移至 AI Navigation 包,需注意哪些冲突问题?
答案:
- 迁移步骤:
- 项目升级后,AI Navigation 包会自动安装;
- 打开 Window > AI > NavMesh Updater,选择要转换的数据类型(如 NavMesh、Navigation Static 标记);
- 执行 Initialize Converters 检测数据,选择目标数据后点击 Convert Assets 完成转换。
- 注意事项:
- 冲突规避:若项目使用了 Unity NavMeshComponents GitHub 仓库的旧脚本(如 NavMesh Surface、NavMesh Modifier),需先删除这些脚本及关联文件,否则会导致组件冲突报错;
- 组件差异:新版 NavMesh Surface 新增 "仅使用带 NavMesh Modifier 的源对象" 选项,NavMesh Modifier 支持作用于子对象,需重新检查相关配置;
- Agent 类型重建:不同场景的 NavMesh 若使用不同 Agent 设置,需重新创建对应的 Agent 类型并分配给 NavMeshSurfaces 和 NavMeshAgents。
问题 3:如何通过 AI Navigation 系统实现 "角色巡逻 + 动画同步" 的功能,核心配置和脚本逻辑是什么?
答案:
- 核心配置:
- 导航配置:生成 NavMesh→给角色添加 NavMesh Agent 组件(设置半径、速度等,禁用 Auto Braking 以实现连续巡逻);
- 动画配置:创建 Animator Controller,包含 2D 混合树(velx/vely 参数控制移动动画)和 Idle 动画,添加 move 布尔参数控制状态切换。
- 脚本逻辑:
- 巡逻脚本(Patrol.cs):定义 public Transform \[\] points 巡逻点数组,Start () 中获取 NavMeshAgent 并调用 GotoNextPoint ();Update () 中检测 agent.remainingDistance<0.5f 时切换下一个巡逻点,通过 destPoint=(destPoint+1)% points.Length 实现循环;
- 动画联动脚本(LocomotionSimpleAgent.cs):获取 Agent 速度并转换为本地空间的 velx/vely,传递给 Animator;通过 OnAnimatorMove () 同步角色位置与 Agent.nextPosition;
- 关键参数:混合树过渡时间设为 0.1 秒,move 参数阈值设为 0.5f(速度 magnitude>0.5f 时触发移动动画)。