权与定权的常用方法详解
1. 权的基本概念与性质
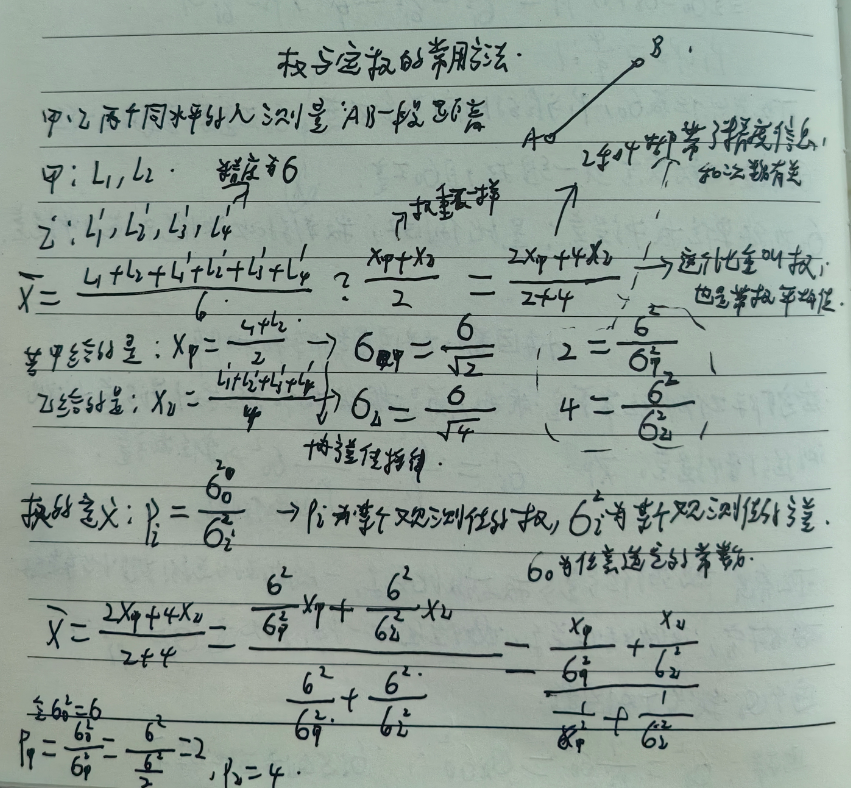
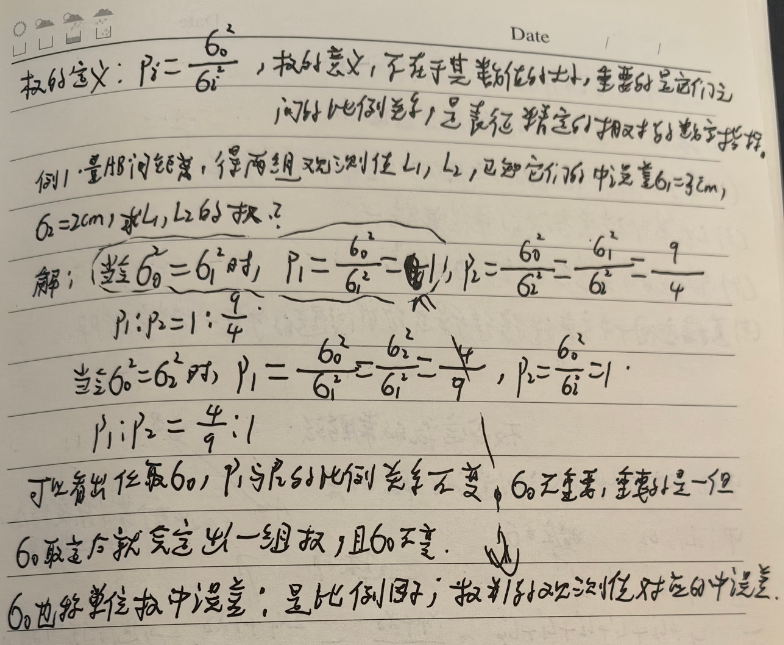
1.1 权的定义
在测量平差中,权(Weight) 是衡量观测值相对精度高低的数值指标,表示该观测值在平差中所占的比重。
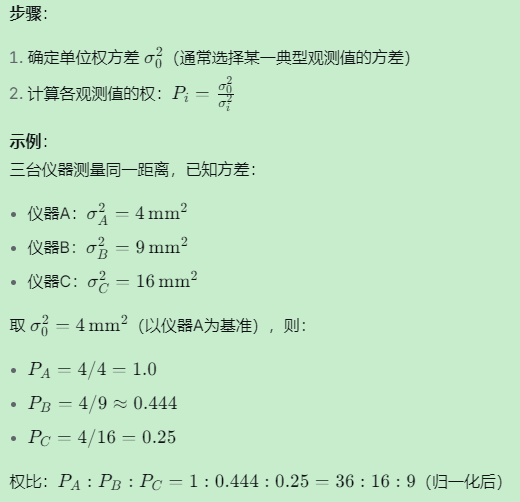
数学定义 :对于观测值 \( L_i \),其权 \( P_i \) 定义为:
\[
P_i = \frac{\sigma_0^2}{\sigma_i^2}
\]
其中:
-
\( \sigma_0^2 \):单位权方差(基准方差)
-
\( \sigma_i^2 \):观测值 \( L_i \) 的方差
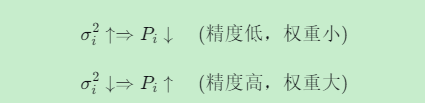
1.2 权的性质
-
相对性 :权是相对值,取决于 \sigma_0^2σ02 的选择。同一组观测值,单位权方差不同则权值不同,但权之间的比例关系不变。
-
与精度正相关:观测值精度越高(方差越小),其权越大。
-
无量纲:权是方差之比,没有单位。
-
取值范围:理论上权应为正数。权为零表示不使用该观测值;负权没有实际意义。
-
比例不变性:权只能确定各观测值精度之间的相对关系。
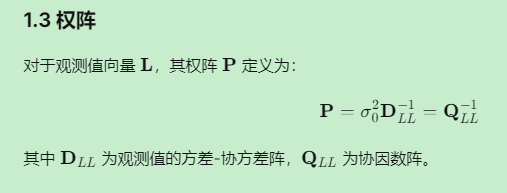
1.3 权阵
2. 定权的常用方法
2.1 先验定权法(已知方差信息)
当观测值的方差已知或可通过先验信息确定时,直接按定义定权。
2.2 按观测条件定权(经验公式法)
当无法直接获得方差时,根据观测条件(仪器类型、观测次数、距离、时间等)通过经验公式定权。
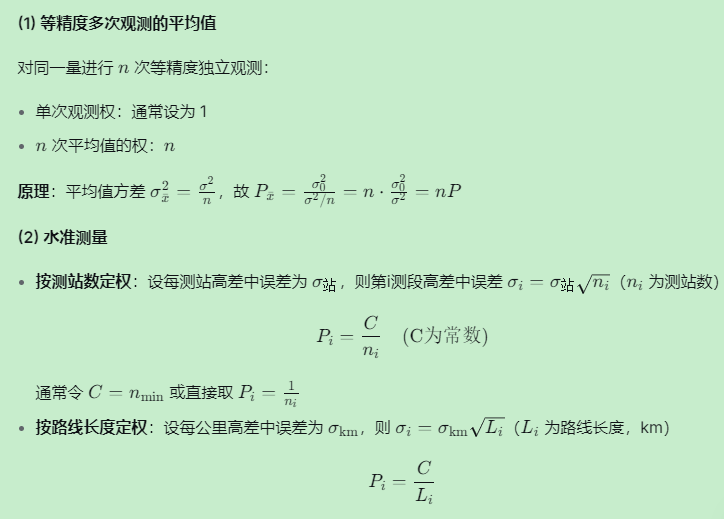
(1) 等精度多次观测的平均值
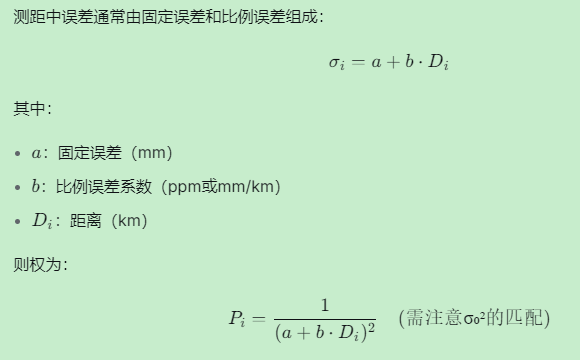
(3) 距离测量(光电测距)
(4) 角度观测
-

即权与测回数成正比。
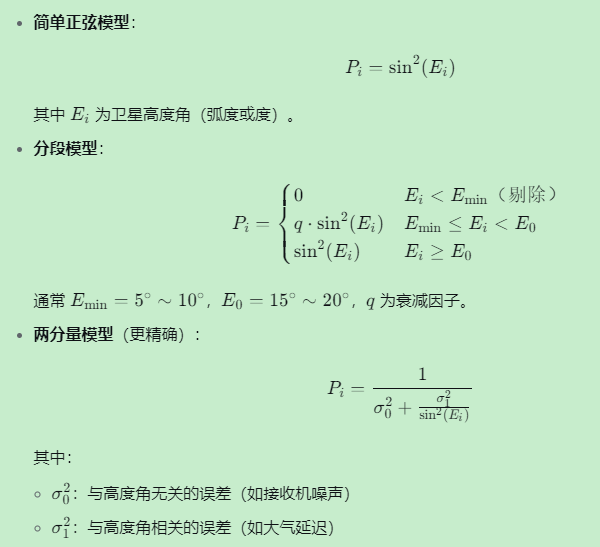
(5) GNSS观测值定权(重点)
在AGNSS中,观测值定权是关键环节,直接影响定位精度。
① 高度角定权模型
卫星高度角越低,信号传播路径越长,大气延迟误差越大,多路径效应越显著。
② 信噪比(SNR)定权 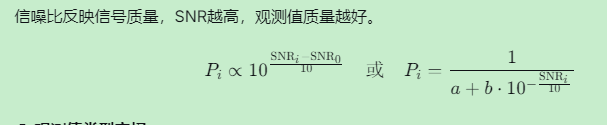
③ 观测值类型定权
-
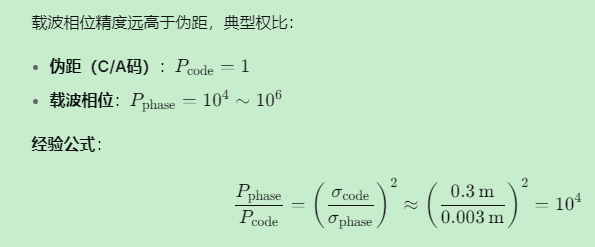
伪距(C/A码、P码):精度较低,权小
-
载波相位:精度高,权大(通常比伪距大10⁴~10⁶倍)
-
多频组合:不同频率观测值精度不同
④ 多系统GNSS定权
不同卫星系统的观测值可能有不同的精度特性:
-
GPS:通常作为基准,权设为1
-
GLONASS:由于频分多址,可能需要调整
-
BDS/Galileo:根据实际性能调整权比
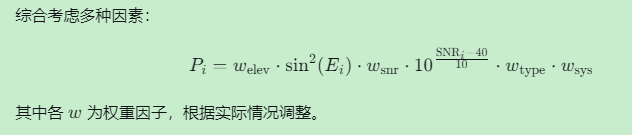
⑤ 综合定权模型
综合考虑多种因素:
2.3 验后定权法(方差分量估计)
当观测值来自不同类型或不同精度来源,且先验权比不确定时,可根据平差后的残差信息重新估计方差分量,迭代调整权。
赫尔默特方差分量估计(Helmert法)
基本思想:
-
给各类观测值赋予初始权(通常等权)
-
进行最小二乘平差,得到残差向量 \mathbf{V}V
-
根据残差计算各类观测值的方差分量估计值
-
重新定权,再次平差,直至收敛
两类观测值的简化公式 :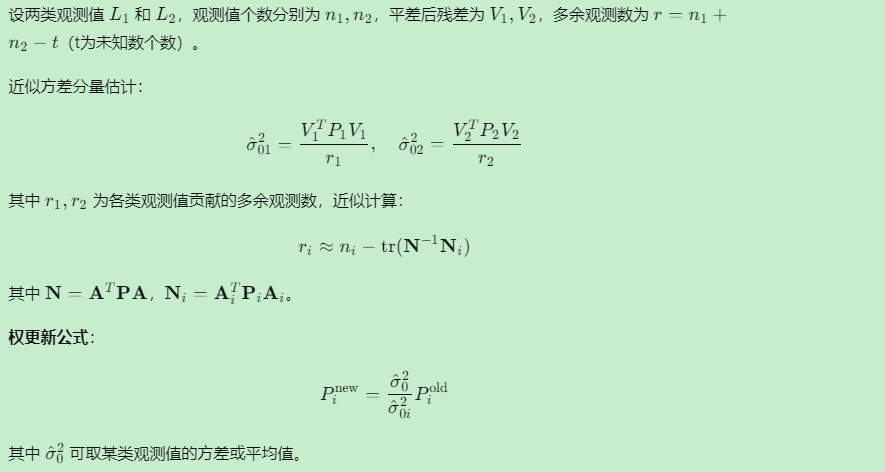
2.4 相关观测值的定权
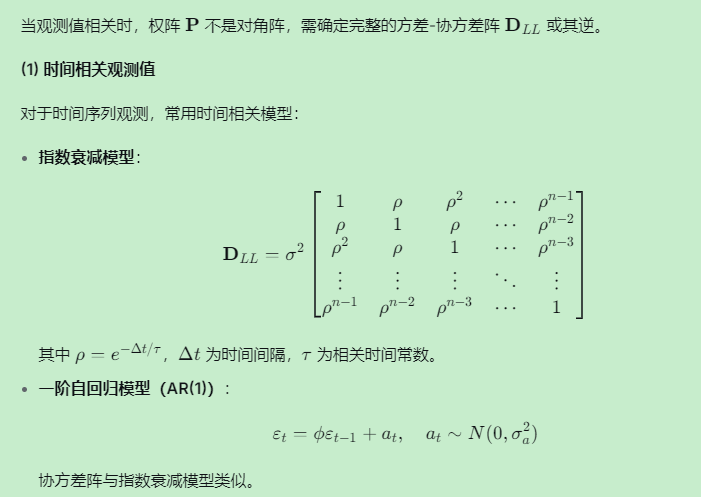
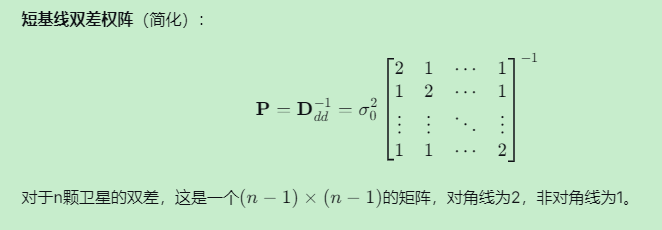
(2) GNSS双差观测值
在相对定位中,双差观测值之间存在相关性:
-
同一历元内不同卫星的双差:通常相关
-
不同历元的双差:可能相关(特别是短基线)
短基线双差权阵(简化):
3. AGNSS中的定权实践
3.1 伪距与相位权比设置
载波相位精度远高于伪距,典型权比:
3.2 多频观测值定权
不同频率的观测值受电离层影响不同:
-
L1频率:通常作为基准,权=1
-
L2频率:噪声略大于L1,权≈0.8~0.9
-
L5频率:精度较高,权≈1.1~1.2
3.3 实时动态定权策略
在动态定位中,权应随时间变化:
def dynamic_weighting(elevation, snr, lock_time, cycle_slip_flag):
"""动态权重计算示例"""
# 基础权重:高度角
w_elev = np.sin(np.radians(elevation))**2 if elevation > 5 else 0
# 信噪比调整
w_snr = 1.0 / (1.0 + np.exp(-0.1*(snr-40)))
# 锁定时间:锁定时间越长,权重越高(相位连续性)
w_lock = min(1.0, lock_time / 300.0) # 300秒达到最大权重
# 周跳检测:有周跳则权重降低
w_cs = 0.1 if cycle_slip_flag else 1.0
# 综合权重
weight = w_elev * w_snr * w_lock * w_cs
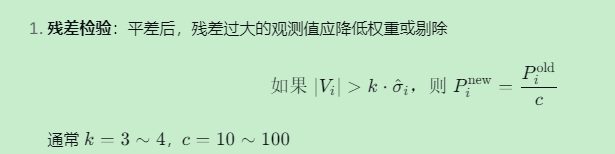
return weight3.4 质量控制与权调整
-
-
迭代权调整 :初始定权 → 平差 → 计算残差 → 检验并调整权 → 重新平差
-
重复直至权不再显著变化或达到最大迭代次数。
4. 定权注意事项
4.1 单位权方差的选择
-
不影响参数估值,但影响单位权方差的估值
-
通常选择精度中等、观测数量多的那类观测值作为单位权
-
在GNSS中,常选择高度角为45°的卫星伪距观测值作为单位权
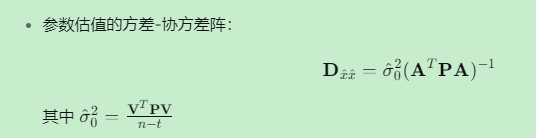
4.2 权与精度估计的关系
-
权只确定相对关系,绝对精度需要单位权方差
-
4.3 定权错误的影响
-
权比正确但绝对值错误:不影响参数估值,只影响单位权方差的估值
-
权比错误:导致参数估值不是最优的(不再是MVUE)
-
严重错误:可能导致平差不收敛或结果明显偏离
4.4 实际应用建议
-
先验信息利用:尽可能利用已知的仪器精度指标、观测条件等信息
-
保守原则:不确定时,采用较保守的权(避免给低精度观测值过高的权)
-
迭代优化:对于重要项目,采用验后定权法迭代优化
-
敏感性分析:评估不同定权方案对结果的影响
-
文档记录:记录定权方法和参数,便于结果追溯和分析
5. 总结
合理的定权是获得高质量平差结果的关键。在AGNSS中,由于观测值类型多样、误差源复杂,需要综合考虑高度角、信噪比、观测值类型、卫星系统等多种因素。掌握先验定权、经验定权和验后定权等方法,并能根据具体应用场景灵活选择和调整,是提高GNSS定位精度的重要技能。
关键要点:
-
权是相对精度指标,权越大表示观测值精度越高
-
定权方法包括先验法、经验公式法和验后估计法
-
GNSS定权需综合考虑高度角、信噪比、观测值类型等因素
-
相关观测值需要完整的权阵,不只是对角阵
-
实际应用中常需要迭代调整权以达到最优结果
通过合理的定权策略,可以显著提高AGNSS定位的精度和可靠性。