目录
CAN总线是一种鲁棒的通信协议,广泛应用于汽车和工业领域,用于不同电子设备之间的可靠数据传输。理解 CAN 总线通信中的不同帧类型对于诊断、调试和确保系统高效运行至关重要。
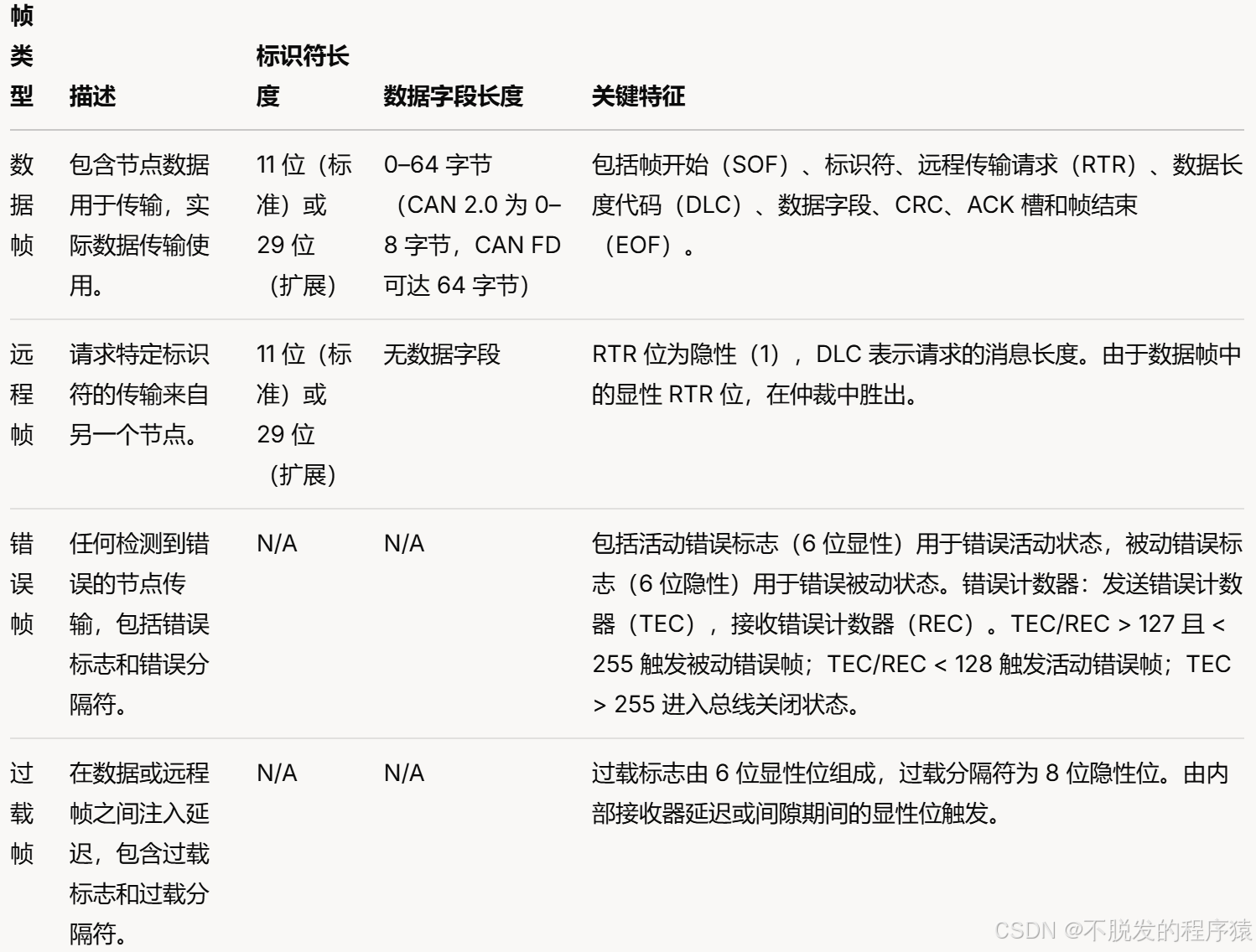
CAN 总线定义了四种主要帧类型:
- 数据帧:携带从一个或多个发送器到接收器的节点数据。
- 远程帧:用于请求特定节点的数据。
- 错误帧:当节点检测到网络错误时传输,用于错误恢复。
- 过载帧:表示节点过于繁忙,需要在接受新消息前延迟。
以下表格总结了各帧类型的关键特征:
要确定 CAN 帧的类型,需要分析其结构和特定字段。
以下是详细步骤:
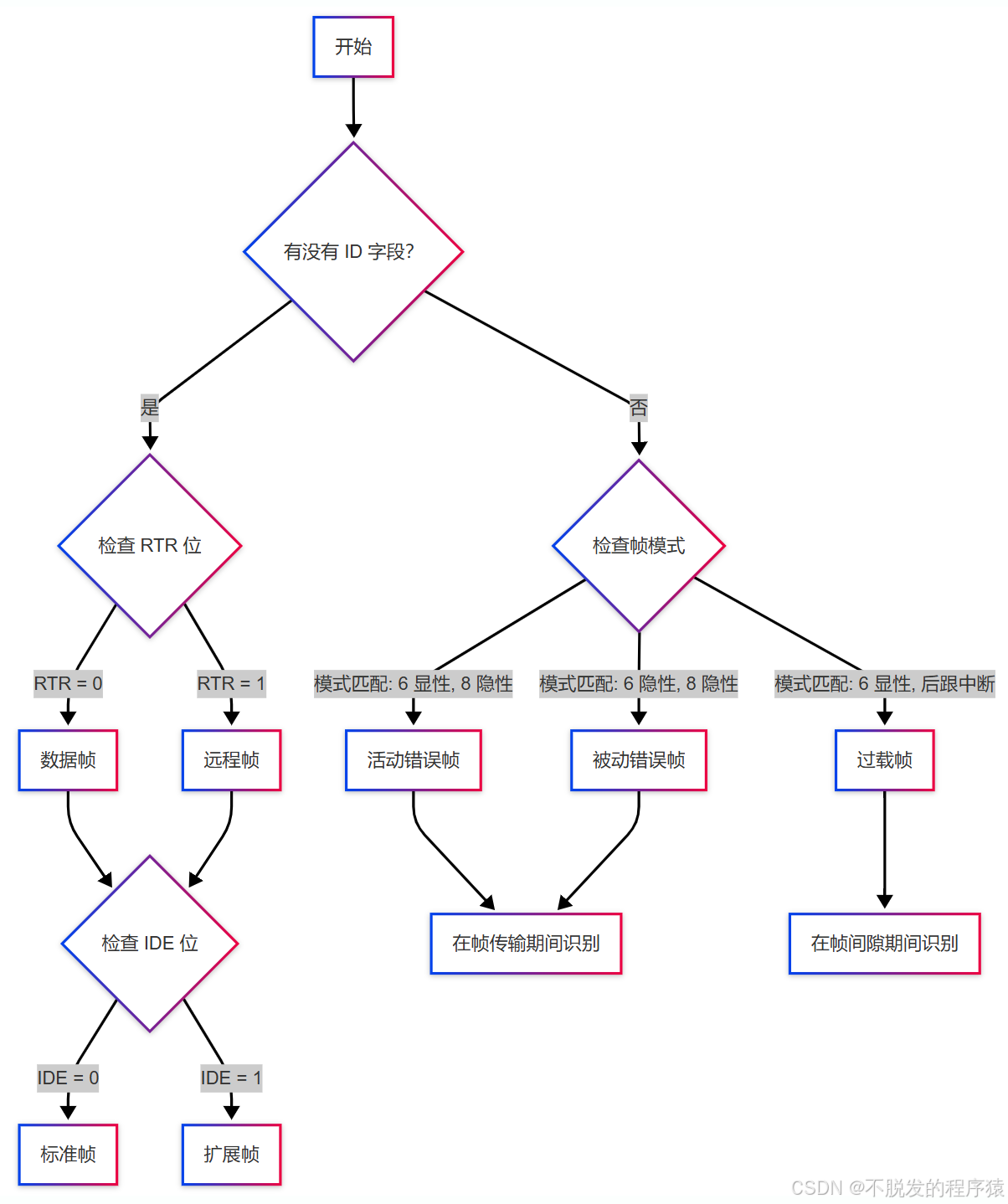
第一步:识别是数据/远程帧还是错误/过载帧
- 数据和远程帧:以帧开始(SOF)位开始,随后是标识符(ID)字段。
- 错误和过载帧:没有 ID 字段,具有特定的标志和分隔符序列。
第二步:区分数据帧和远程帧
对于数据和远程帧,检查控制字段中的远程传输请求(RTR)位:
- 如果 RTR 为 0,则为数据帧。
- 如果 RTR 为 1,则为远程帧。
第三步:区分标准帧和扩展帧
CAN 帧可以是标准帧(11 位 ID)或扩展帧(29 位 ID)。通过控制字段中的标识扩展(IDE)位区分:
- IDE 为 0:标准帧。
- IDE 为 1:扩展帧。
第四步:区分错误帧和过载帧
错误帧和过载帧有相似的位模式:6 位标志后跟 8 位分隔符。具体的区分如下:
- 错误帧 :
- 活动错误帧:6 位显性位后跟 8 位隐性位。
- 被动错误帧:6 位隐性位后跟 8 位隐性位。
- 过载帧:6 位显性位后跟 8 位隐性位。
要进一步区分活动错误帧和过载帧,需要考虑传输的时机:
- 如果该序列出现在数据或远程帧的传输期间,可能是错误帧。
- 如果出现在完整帧后的间隙期间,可能是过载帧。
确定 CAN 帧的类型对于理解和管理 CAN 总线通信至关重要。通过检查特定位和传输时机,可以准确识别帧是数据帧、远程帧、错误帧还是过载帧。此知识对于故障排除和优化基于 CAN 的系统至关重要。