车道线拟合算法
车道线拟合是自动驾驶感知层的核心算法之一,核心目标是从相机、激光雷达(LiDAR)/ 点云、高精地图等数据源提取的车道线特征点中,通过数学模型拟合出连续、平滑、鲁棒的车道线轮廓,输出车道线的几何参数(如斜率、截距、曲率、车道宽度等),为下游车道保持、路径规划、车道变换决策等 AD 任务提供精准的车道级几何约束。
拟合算法的设计需贴合自动驾驶实际场景(直道 / 弯道、近景 / 远景、遮挡 / 低纹理、高速 / 城区),核心要求是鲁棒性(抗噪 / 抗遮挡)、实时性(车端低算力适配)、准确性(贴合真实车道线),且常与你之前关注的点云处理、单目深度估计(如 VGGT) 结合,实现 2D/3D 车道线拟合。
以下从核心分类、常用算法原理 / 适用场景、工程完整流程、优化技巧、自动驾驶场景适配展开,全程贴合车端工程落地。
一、车道线拟合的核心前提:特征点提取
拟合算法的输入是车道线特征点(离散点集),需先从原始传感器数据中提取,常见数据源的特征点提取方式:
相机视觉:通过灰度化、阈值分割、Canny 边缘检测、霍夫变换、语义分割(CNN/Transformer)得到 2D 像素级车道线特征点;
激光雷达 / 点云:将点云投影到地面平面,通过聚类、欧氏距离筛选、反射率阈值(车道线反光率高)得到 3D 空间车道线特征点;
单目深度估计(如 VGGT):结合输出的深度图 + 相机内外参,将 2D 视觉特征点转换为 3D 世界坐标特征点,解决纯视觉的尺度模糊问题;
高精地图:从高精地图的语义层中提取车道线的先验特征点,作为拟合的约束参考。
核心痛点:提取的特征点存在离群点(噪声)、遮挡缺失、远景点稀疏(如 VGGT 模型远景区置信度低),因此拟合算法的核心是对离散 / 含噪的特征点做有效建模。
二、车道线拟合算法核心分类(按模型维度)
自动驾驶中车道线拟合分为2D 拟合(像素坐标系 / 车辆局部坐标系)和3D 拟合(世界坐标系),2D 拟合是基础,3D 拟合是高阶方案(适配高精定位 / 路径规划),核心算法按车道线形态分为直线拟合(直道)和曲线拟合(弯道),且均搭配鲁棒拟合策略解决离群点问题。
(一)基础直线拟合算法(适配:高速直道、城区直道)
绝大多数高速场景以直道为主,直线拟合模型简单、计算量小、实时性高,是车端默认的基础拟合方案,核心模型为一元线性方程:y=kx+b(像素坐标系 / 车辆坐标系),或极坐标形式ρ=xcosθ+ysinθ(抗斜率无穷大(垂直车道线)问题)。
- 普通最小二乘法(OLS)
核心原理:最小化所有特征点到拟合直线的垂直距离平方和,求解最优k(斜率)、b(截距),是最基础的拟合方法;
公式: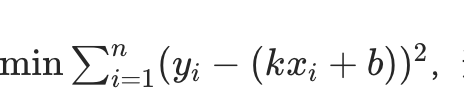
,通过求导令偏导为 0,直接解出k和b的解析解;
优点:计算量极小、毫秒级求解,适配车端实时性;
缺点:抗离群点能力极差,少量噪声点 / 遮挡产生的异常点会严重偏离真实车道线,仅适用于无噪、特征点完整的理想场景。
- 加权最小二乘法(WLS)
核心改进:针对近景特征点密集 / 置信度高,远景特征点稀疏 / 置信度低(如 VGGT 模型的特性),为每个特征点赋予权重系数wi,近景点权重高、远景点权重低,最小化加权距离平方和;
公式:
权重设计:可按点到相机的距离(距离越近权重越大)、特征点置信度(如 VGGT 输出的深度置信度)、点的密度赋值;
优点:保留最小二乘的实时性,适配自动驾驶近景精准、远景参考的需求;
缺点:仍无法彻底解决大量离群点的问题。
- RANSAC 直线拟合(最工程常用)
核心原理:随机抽样一致性,通过随机采样 - 模型验证 - 内点计数的迭代过程,剔除离群点,保留符合车道线特征的内点,再用最小二乘对內点做精准拟合;
核心步骤:
从特征点集中随机抽取2 个点,拟合一条初始直线;
计算所有特征点到该直线的距离,若距离小于阈值(如 2px/5cm),判定为内点,否则为离群点;
统计内点数量,若内点占比超过设定阈值,用所有内点重新拟合直线,作为候选最优模型;
迭代 N 次(通常 20-50 次,兼顾实时性),选择内点数量最多的候选模型作为最终拟合直线;
优点:抗离群点 / 抗遮挡能力极强,能处理 70% 以上离群点的极端场景,是自动驾驶直线拟合的标配算法;
缺点:存在少量迭代计算量,但迭代次数可控,车端可轻松适配。
(二)曲线拟合算法(适配:城区弯道、高速缓弯、连续变道)
城区 / 园区场景存在大量弯道,直线模型无法贴合真实车道线,需采用曲线模型,自动驾驶中最常用的是多项式拟合(抛物线 / 三次曲线),其次是B 样条拟合(复杂弯道),核心原因是多项式模型参数少、计算快、易解算曲率(车道曲率是路径规划的关键参数)。
- 二次多项式拟合(抛物线,最常用)
核心模型:车道线的弯道曲率变化基本符合抛物线规律,模型为y=ax2+bx+c(车辆局部坐标系,x 为纵向距离,y 为横向偏移,贴合车辆行驶视角),3 个参数、、可直接解算车道曲率
拟合方法:鲁棒最小二乘(RANSAC + 最小二乘),先通过 RANSAC 剔除离群点,再用内点做最小二乘求解、、的解析解;
适用场景:平缓弯道、高速缓弯、连续小曲率弯道,覆盖 90% 以上的弯道场景;
优点:参数少、计算量小,可直接解算曲率,车端实时性极佳;
缺点:无法适配急弯、大曲率弯道(如园区 U 型弯、环岛)。
- 三次多项式拟合(三次曲线)

拟合方法:同二次多项式,RANSAC + 最小二乘,需更多的特征点支撑参数求解;
适用场景:城区急弯、环岛、园区 U 型弯等大曲率场景;
优点:拟合复杂弯道的精度更高;
缺点:参数增多,易出现过拟合(尤其远景特征点稀疏时),需增加先验约束。
- B 样条曲线拟合(高阶复杂场景)
核心原理:通过控制点和基函数构建平滑的分段曲线,无需全局拟合,可对车道线做分区域平滑拟合,避免过拟合;
适用场景:城市复杂多弯道、连续变道、车道线曲率突变的场景;
优点:拟合曲线极平滑,对曲率突变的适应性强;
缺点:计算量较大,控制点选取需依赖先验,车端仅在高端 AD 系统中使用。
(三)3D 车道线拟合(自动驾驶高阶方案)
纯 2D 拟合仅能得到像素 / 车辆局部坐标系的车道线,无法对接全局路径规划、高精地图,因此需结合单目深度估计(如 VGGT)、LiDAR 点云、相机内外参实现3D 车道线拟合,核心模型为空间多项式 / 空间直线,常用公式: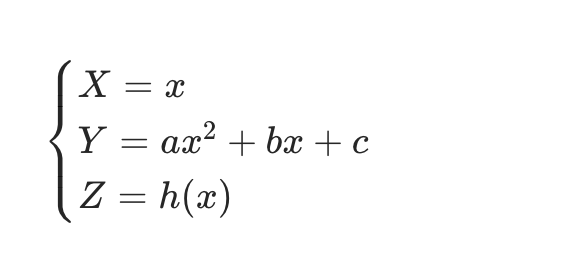
其中X/Y/Z为世界坐标系 3D 坐标,x为车辆纵向距离,h(x)为车道线的高程(路面平坦时可近似为常数)。
核心输入:VGGT 等模型输出的2D 特征点 + 深度值 + 相机内外参,或 LiDAR 的 3D 车道线特征点;
核心价值:输出的 3D 车道线参数可直接对接AD 路径规划算法、高精地图语义层更新,实现车道级的全局路径规划。
三、自动驾驶车道线拟合的工程完整流程
车端落地的拟合算法并非单一模型,而是 **"预处理 - 拟合 - 后处理 - 验证"的闭环流程,解决噪声、遮挡、远景稀疏、帧间抖动 ** 等问题,贴合实际行驶场景:
步骤 1:特征点预处理(核心:去噪 + 筛选)
离群点初步剔除:通过统计滤波(SOR) 剔除特征点集中的孤立噪声点(如点云处理的常用方法);
区域约束筛选:根据车辆行驶视角,设定车道线有效区域(如相机图像的下半部分、点云的前方 0-100m),剔除区域外的无效点;
先验约束筛选:基于车道宽度先验(如城市道路 3.75m、高速 3.5m)、车道线平行约束,剔除超出车道宽度范围的异常点;
权重赋值:为特征点按距离 / 置信度赋值(近景高权重、远景低权重),适配 VGGT 等模型远景区置信度低的特性。
步骤 2:坐标系转换(核心:消除透视畸变 / 尺度模糊)
相机视觉:将 2D 像素坐标通过相机内参、透视变换(鸟瞰图 BEV) 转换为车辆局部坐标系(鸟瞰图无透视畸变,拟合更准确);
单目深度 + 视觉:结合 VGGT 输出的深度图 + 相机内外参,将 2D 像素点转换为3D 世界坐标点,解决纯视觉的尺度模糊;
LiDAR 点云:将点云通过点云配准、地面分割转换为车辆局部 / 世界坐标系,直接得到 3D 特征点。
步骤 3:拟合模型选择(核心:自适应切换)
车端通过帧间插值、曲率预判、高精地图先验实现模型自适应切换,无需人工干预:
直道判定:若当前帧特征点的曲率小于阈值(如k<0.001m−1),选择RANSAC 直线拟合;
弯道判定:若曲率大于阈值,根据曲率大小选择二次 / 三次多项式拟合;
先验约束:若高精地图存在车道线先验,直接用先验模型约束拟合参数,提升鲁棒性。
步骤 4:鲁棒拟合计算(核心:RANSAC + 最小二乘)
对预处理后的特征点,用RANSAC随机采样生成候选模型,统计内点数量,选择最优内点集,再用最小二乘求解模型的解析参数,得到单帧车道线拟合结果。
步骤 5:拟合结果后处理(核心:平滑 + 帧间融合)
单帧拟合结果易受遮挡 / 特征点缺失影响产生抖动,需做后处理平滑,自动驾驶中最常用的方法:
滑动窗口平均:对最近 5-10 帧的拟合参数(、、、)做滑动平均,降低单帧抖动;
卡尔曼滤波(KF)/ 扩展卡尔曼滤波(EKF):将车道线参数作为滤波状态量,通过预测 - 更新环节实现帧间参数平滑,适配弯道的参数动态变化;
分区域拟合:将车道线分为近景(0-30m)、中景(30-60m)、远景(60-100m),近景用原始特征点拟合,中 / 远景用近景参数做插值外推,解决远景特征点稀疏的问题。
步骤 6:拟合结果有效性验证(核心:剔除无效结果)
对拟合后的车道线参数做合理性检查,若不符合先验约束,判定为无效拟合,切换为高精地图先验 / 上一帧有效结果,避免错误参数传入下游 AD 任务,验证规则:
车道宽度约束:左右车道线的横向距离需在3.0-4.0m(城市 / 高速)范围内;
曲率约束:车道线曲率需在合理范围(如高速k<0.005m−1,城区k<0.05m−1);
参数突变约束:当前帧与上一帧的拟合参数变化量需小于阈值,避免突变;
内点占比约束:RANSAC 的内点占比需大于 50%,否则拟合结果无效。
四、核心优化技巧(贴合自动驾驶场景痛点)
针对自动驾驶中遮挡、低纹理、远景稀疏、尺度差异(如 VGGT 模型的尺度问题)等痛点,工程上的经典优化手段:
- 结合先验知识的约束拟合
将车道宽度、车道线平行、曲率范围、车道走向(高精地图) 作为硬约束嵌入拟合模型,缩小参数求解范围,避免过拟合 / 无效拟合。例如:拟合左右车道线时,强制约束左右车道线的斜率一致(直道)、曲率一致(弯道),车道宽度固定为 3.75m。 - 多传感器融合拟合
融合相机视觉 + LiDAR 点云 + VGGT 单目深度的特征点,视觉特征点密集(近景),点云 / 深度特征点精准(3D 尺度),互补提升特征点的完整性,解决单传感器的遮挡 / 稀疏问题。 - 针对尺度差异的校准
若基于单目深度估计(如 VGGT)的 3D 拟合存在尺度差异,通过高精地图先验、LiDAR 点云(少量关键帧)、车道宽度先验对拟合结果做尺度校准,修正 3D 车道线的绝对尺度。 - 动态权重拟合
针对远景特征点稀疏 / 置信度低的问题,为特征点赋予动态权重:近景点(0-30m)权重 1.0,中景点(30-60m)权重 0.7,远景点(60-100m)权重 0.3,既利用远景信息,又避免远景噪声的干扰。 - 缺失区域的插值补全
当车道线因遮挡(如前车、护栏)产生特征点缺失时,用相邻区域的拟合参数做线性 / 多项式插值,补全缺失区域的车道线,保证拟合结果的连续性。
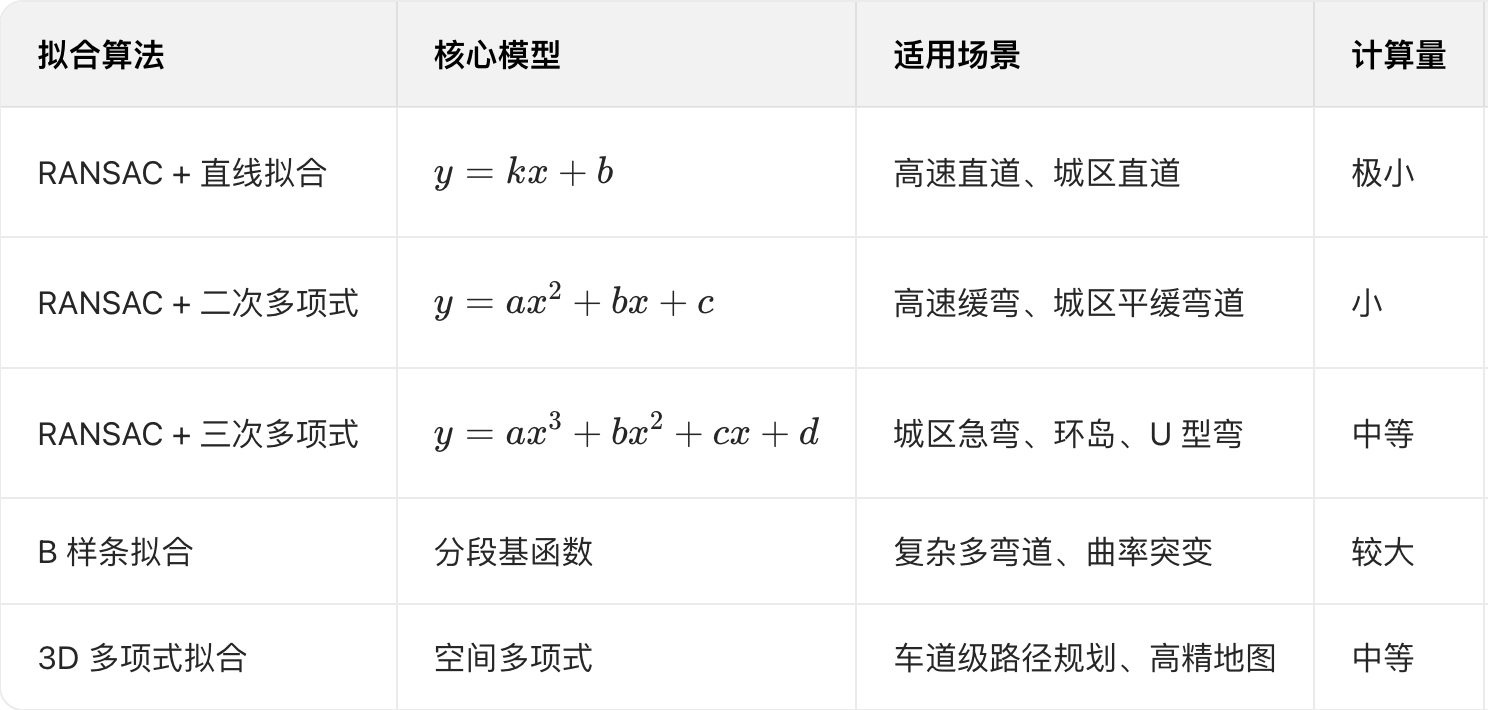
五、各拟合算法的自动驾驶场景适配对比
六、与 VGGT 单目深度估计的结合(贴合你的技术栈)
VGGT 模型输出的相机内外参、深度图、点云地图可直接为车道线拟合提供核心输入,实现2D→3D 的车道线拟合升级,核心结合点:
特征点 3D 化:将 VGGT 输出的 2D 视觉车道线特征点,通过深度图 + 相机内外参转换为 3D 世界坐标特征点,解决纯视觉的尺度模糊问题;
置信度加权:利用 VGGT 的深度置信度为 3D 特征点赋值,置信度高的点赋予高权重,置信度低的远景点赋予低权重,提升拟合鲁棒性;
点云辅助拟合:从 VGGT 输出的点云地图中,提取地面车道线的 3D 点云特征点,与视觉特征点融合,解决相机视觉的遮挡 / 低纹理问题;
3D 车道线输出:基于 3D 特征点做空间多项式拟合,输出 3D 车道线参数,直接对接 AD 路径规划算法、高精地图的语义层更新。