1、第一阶段:获取镜像迁移至 F 盘
微软商店默认安装在 C 盘,所以解决策略是:先安装(临时在 C 盘)-> 导出成文件 -> 彻底卸载 -> 导入到 F 盘。
Windows操作:
查看可以安装版本: wsl --list --online
安装自己需要的版本:wsl --install -d Ubuntu-22.04
导出镜像:wsl --export Ubuntu-20.04 F:\ubuntu20_backup.tar
注销原系统:wsl --unregister Ubuntu-20.04
导入到F盘:wsl --import Ubuntu-20-Noetic F:\WSL\Ubuntu20_Noetic F:\ubuntu20_backup.tar
PS:这里的 F:\WSL\Ubuntu20_Noetic需要自己提前建好文件夹
2、第二阶段:恢复用户并配置环境
1、启动新系统:
在window下执行:wsl -d Ubuntu-20-Noetic
2、添加普通用户:
adduser yourname
3、赋予sudo权限:
usermod -aG sudo yourname
4、修改启动文件:
下次启动时自动加载普通用户:nano /etc/wsl.conf
在nano编辑器中添加以下内容
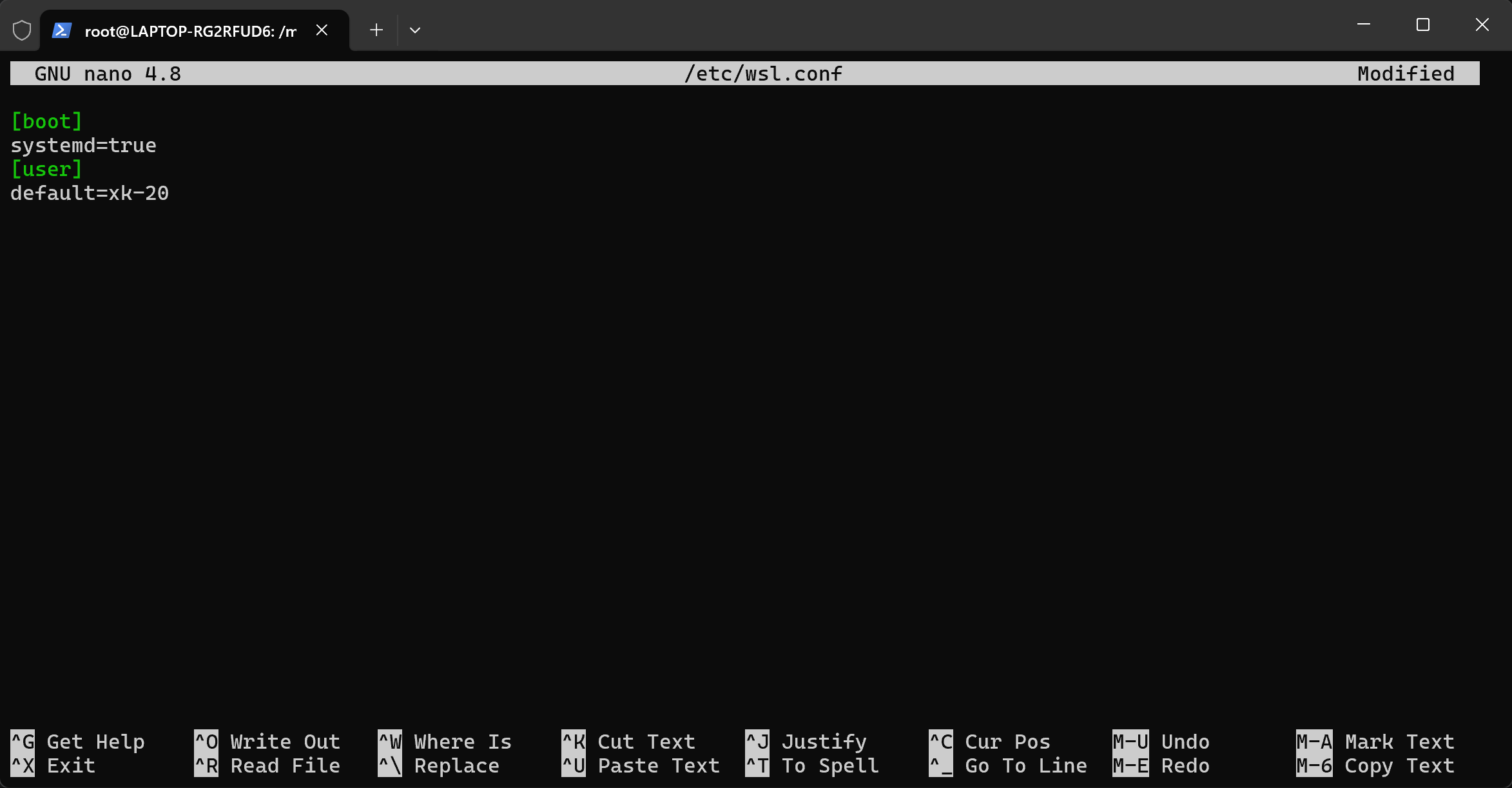
crtl O 写入,Enter确认,crtl x退出
5、重启生效:
在 Linux 终端输入 exit 退出。
在 PowerShell 执行:wsl --shutdown。
再次启动:wsl -d Ubuntu-20-Noetic。
此时你应该看到用户变成了你设置的名字,而不是 root。
3、第三阶段:安装ROS1-noetic
1、鱼香Ros一键安装:
wget http://fishros.com/install -O fishros && . fishros
2、根据需求选择:
换源、清华源、ros-noetic版本、桌面版full
3、rosdepc更新:
一般安装ros能够成功,但是rosdepc会出现一些问题,导致安装不上,以下单独安装:
1>安装依赖:
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential -y
2>安装更新rosdepc
sudo apt install python3-pip -y
sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
PS:这个不安装也没关系,主要作用是自动检测src的依赖然后进行自动补充安装
4、验证gazebo
输入roscore验证rosmaster核心没有问题
关闭后输入gazebo验证是否吃到了window下的GPU,一般看fps能达到60,就很好了