最近有个项目需要使用到csm400b,这里做一个记录。
设备树
以我的为例子,在设备树中添加csm400b的节点
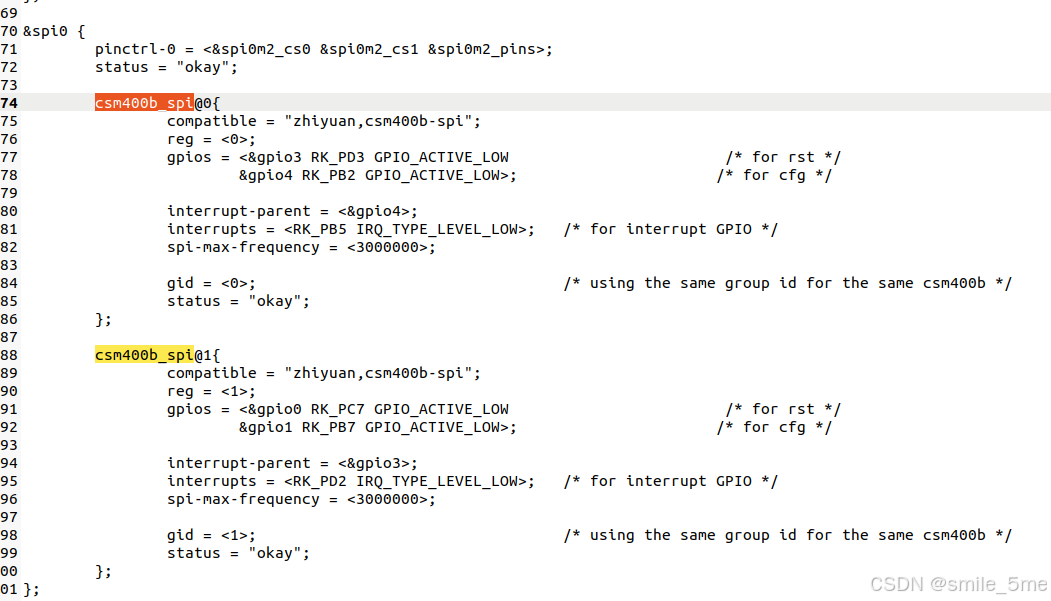
其中gid就是用于区分不同的模组,若有多个的话需要区分开来。
spi能配置模块,需要配置gpios(需要按顺序填写,先RST,后CFG),还需要配置一个gpio引脚为中断引脚。
spi-max-frequency要设置适当的值,如果过高会导致数据无法收发成功。
驱动文件
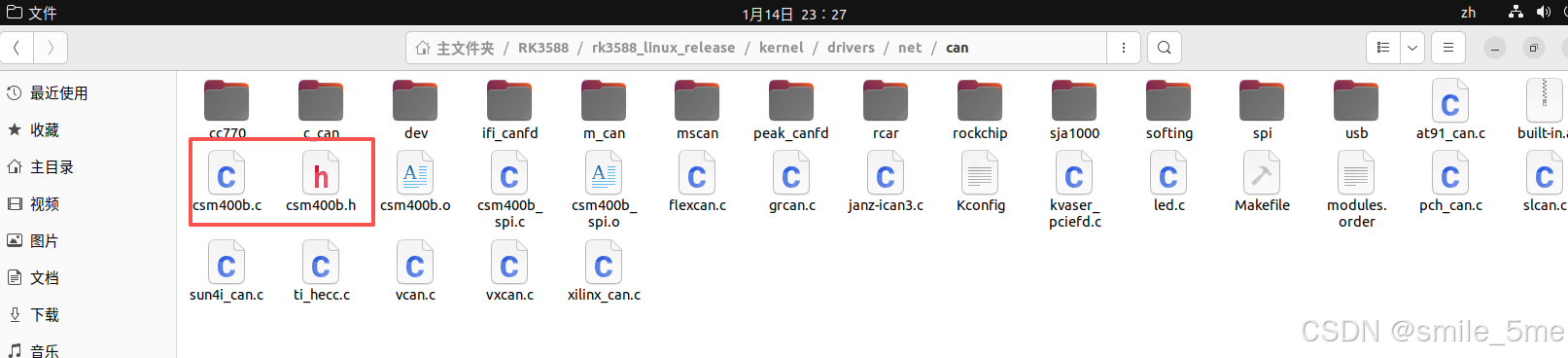
将CSM400B的驱动csm400b.c、csm400b_spi.c、csm400b.h拷贝到kernel/drivers/net/can目录。
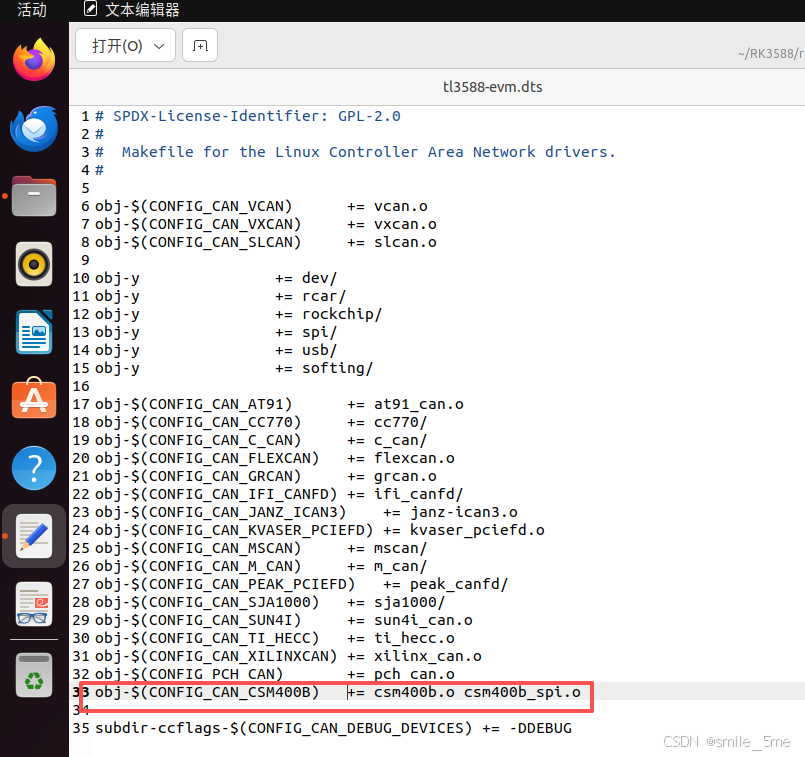
修改kernel/drivers/net/can/Makefile(不要使用obj-y的写法,会影响到驱动)
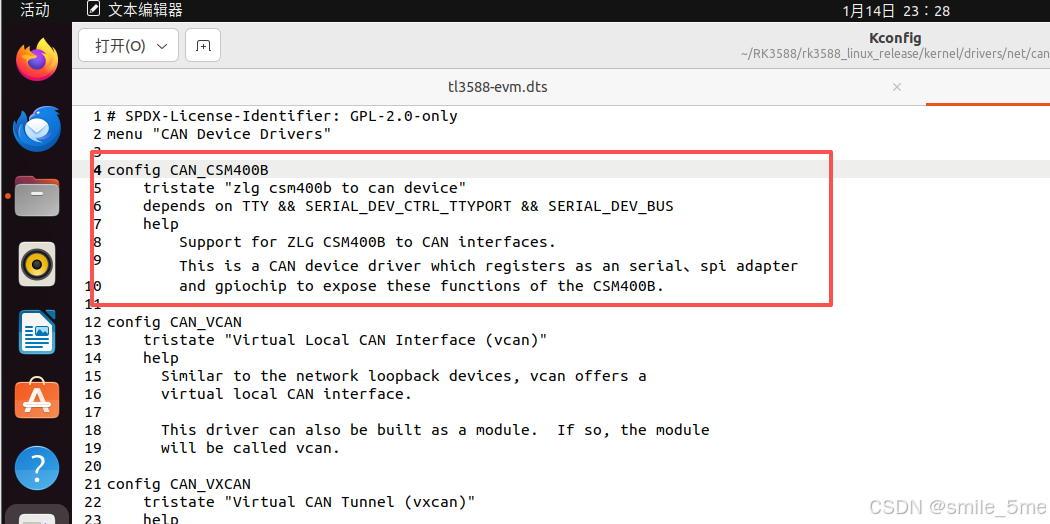
修改kernel/drivers/net/can/Kconfig
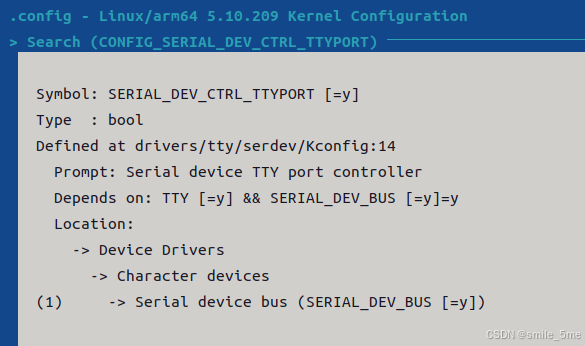
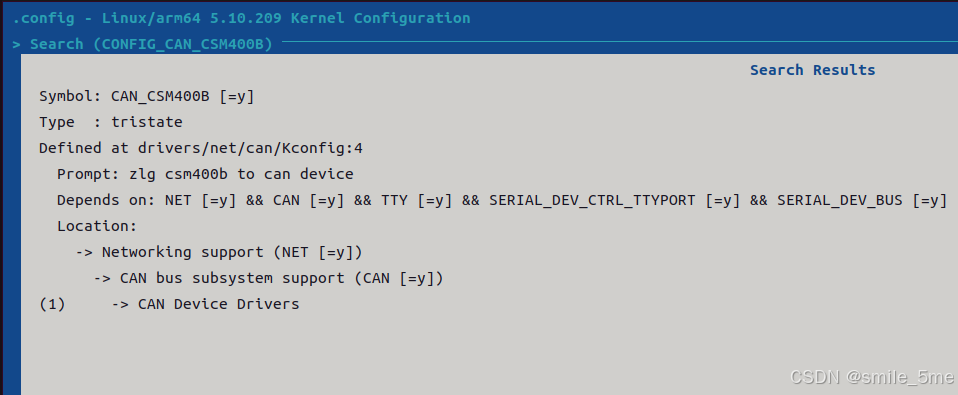
修改linux内核配置make menuconfig,可以在./build.sh kernel-config进行更改
bash
CONFIG_SERIAL_DEV_BUS=y
CONFIG_SERIAL_DEV_CTRL_TTYPORT=y
CONFIG_CAN_CSM400B=y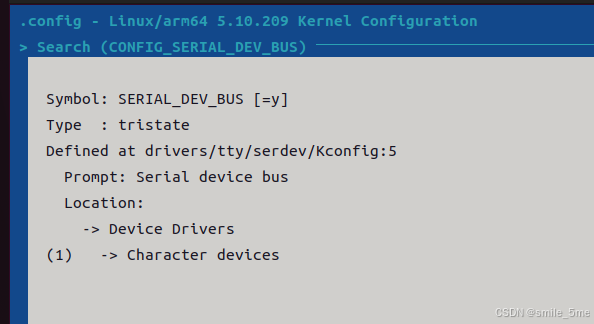
至此驱动这边已经设置完成,只需要重新编译即可。
测试
首先先输入命令查看内核信息,csm400b驱动加载时会检查模块是否可以正常,如果正常内核log中会出现"spi check ok"相关信息
bash
dmesg | grep "csm400b"
显示如下则为初始化成功:
csm400b-spi spi0.0 can3: GID = 0, spi check ok.进入设备目录
bash
cd /sys/bus/spi/drivers/csm400b-spi/spi0.1然后cat一下寄存器
bash
cat registers01寄存器必须是05,若不是的话,需要配置成05才行,然后在cat一下,查询是否01正确被修改
bash
echo 0x1 0x5 > registers然后设置仲裁域波特率和数据位域波特率,我将这两个波特率都设置为500K
bash
echo 0x5 0x1a0108 > registers
echo 0x6 0x1a0108 > registers然后再设置,但是这几个配置的波特率是不会生效的,如果需要修改的话,还是需要在寄存器修改,但是为了保险起见,还是都设置为500K
bash
ip link set can1 down
ip link set can1 type can bitrate 500000 dbitrate 500000 fd on
ip link set can1 up调试软件也需要设置仲裁域波特率和数据位域波特率,必须要一样
读取can1接收的数据
bash
candump can1从can1发送数据,注意每次发送之前都要echo一下通道
bash
echo 1 > channel
cansend can1 123##1AABBCCDD
echo 2 > channel
cansend can1 123##1DDCCBBAA注意事项
- 在设置驱动文件的时候,所使用的rst,cfg,interrupt必须设置正确或者是正确被驱动,否则在设备会初始化失败
- 我目前拿到的这个版本的驱动,是无法使用ip命令来配置仲裁域波特率和数据位域波特率,也就是说在ip那里设置的参数是无法真正生效的,必须修改寄存器才可以配置。(若后续调试可咨询相关厂家,好像后面的驱动是支持了的)
- 目前我也仅测试了500K