四轴飞行器学习笔记
1.前言
最近迷上了四轴飞行器,想系统地学一学无人机相关的知识。起因很简单:我做嵌入式开发,最近项目里涉及到姿态传感器和PID控制,正好四轴飞行器不仅是这些知识的绝佳实践载体,又可以作为个人玩具耍耍~~作为一个爱折腾的技术宅,如果能亲手写一套控制逻辑,看着自己组装的无人机稳稳地悬停在空中,那种成就感十足。
一开始我是奔着DIY去的。觉得只有自己从零搭一台,才能真正理解底层原理。于是开始疯狂看资料:
-
飞行原理:升力、姿态控制、四旋翼动力学
-
PID控制或LQR控制
-
飞控选型:F4、F7、H7芯片的区别,BetaFlight、iNav、ArduPilot固件对比
-
硬件搭配:机架、电机、电调、电池、螺旋桨等......
了解相关知识后,我决定选择使用无刷电机,因为其性能会更好,而且不容易损坏。于是我列了无人机组装的BOM清单,然后改了又改,最后开始选型电机,研究KV值;选型电调,研究电调的各种开源固件协议...就这样我折腾了大半个月,代码一行没写,在硬件兼容性和排查短路上就花费了太多太多的时间。我买了好几款电调,好几款电机,期间出现各种意外:电调跟电机的KV值不匹配,烧坏了我的电调;电机测试时可能是因为焊接问题莫名冒烟损坏;电调的固定方式困难,一不小心就短路了等情况,最终积累了不少损坏的电机电调,制作成本也开始日益增加。
本以为是技术大佬的进阶之路,结果却变成了"踩坑之旅",还是小看了这个基础飞行器搭建。我开始反思:我的初衷是学习研究飞控算法和各种高阶应用,实在是没必要死磕在这些重复造轮子的硬件琐事上。对于像我这种"算法学习"的人来说,我需要的只是一个基础的平台! 于是我开始研究开源的飞控,试图直接买被验证过的硬件搭配去组装成品,毕竟网上那么多公开可用的案例。我对着各类飞控研究了几天,然后问题又来了:著名的ArduPilot、Pixhawk等开源平台,它们的兼容性很强大,支持多种飞行器模型、多类的传感器,但随着而来的是,他们的代码量非常巨大,对我这种想从简单方案入门的人并不太友好。
在入门的各种问题困扰下,我开始在网上找成品开源的四轴飞行器,我的诉求就是找到一个简单的平台,方便入门,支持二次开发的产品。这便于我研究和修改飞控相关的算法,可以自己写一套控制逻辑。最后综合考虑下来,我选择了轮趣的F570开源无刷四轴飞行器。它简直是我的理想之选,完美地满足我的需求:
-
使用耐用的无刷电机,性能足以满足各种算法验证
-
碳纤维机架,硬度足够了
-
它飞行器内部还是用的四合一电调,不再需要复杂凌乱的接线了。不像我之前买的那种单路的电调,4个电机要4个电调,供电和接线搞的令人头疼。
-
它配备了桨叶保护套,在我调试使用期间,安全系数是拉满了。
-
软件方面,有完整的开源资料,代码量也不像其他开源飞控那么多那么复杂,入门友好。
另外,这款无人机还有个特点是采用了系留式的方案,电池是外置的,飞机标配的电池容量很大,调试期间基本不用担心续航的问题。同时还有光流块、雷达模块可以选配拓展,他们的资料包里也提供了这两个传感器的定点算法方案,值得参考学习一下~
更贴心的是,轮趣科技在 B 站上还发布了【F570 无刷四轴飞行器完整开源教程】视频,包含22条视频学习内容,从课程简介、硬件组成到飞控板与电调版原理图讲解,基于 STM32 与 FreeRTOS,还覆盖了 PID/LQR 两种核心算法,零基础也能跟着从核心原理学到功能复现,大家可以直接去 B 站参考学习:https://www.bilibili.com/video/BV1GvrwBaE56/?vd_source=2e33f81092ad6fb91403e4d96ee63d2f#reply286319827793

轮趣科技的F570无人机
基于轮趣的飞行器硬件,解决了我的"造轮子"难题后,就可以开始我的愉快学习之路了!
2.飞行器的基本硬件和软件系统组成
虽然购买了成品的飞行器不再重复造轮子,但是飞行器的基本硬件还是要了解的,还有整个软件框架是如何实现,这个也是飞行器开发必须了解的内容。这里我总结了如下的要点分享给大家:
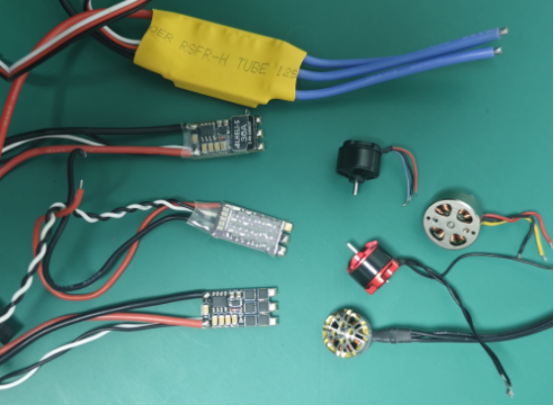
硬件部分:
-
机架,这个无需过多介绍。选型就是往强度大、质量轻这两个方向选型,碳纤维机架非常合适。
-
无刷电机需搭配电调使用,常规方案为1个电机对应1个电调(共4个),而轮趣F570飞行器采用四合一电调方案,仅需1个电调板即可驱动4个电机;如果是有刷电机,则需要基本的有刷电机驱动电路。
-
4个桨叶(一对正桨、一对反桨)
-
飞控板:里面跑飞控算法程序,是飞行器的大脑
-
驱动电路:负责电机的控制。有刷电机或无刷电机均需要,通常无刷电机的驱动电路会更复杂,也称作电调。
-
测距传感器:可以是气压计,也可以是激光测距。我个人比较推荐激光测距,它比气压计会稳定的多,不需要做太复杂的数据处理。
-
光流模块:要实现飞行器定点悬停功能,大部分方案都是使用这个传感器提供位置信息,不然飞行器只会乱飞。
此外,轮趣F570还支持选配雷达模块,这个虽然不是必须的硬件,不过有雷达还可以实现避障、跟随功能。此外,轮趣还提供了雷达定位算法,仅用雷达就可以实现飞行器的定点功能,非常强大。
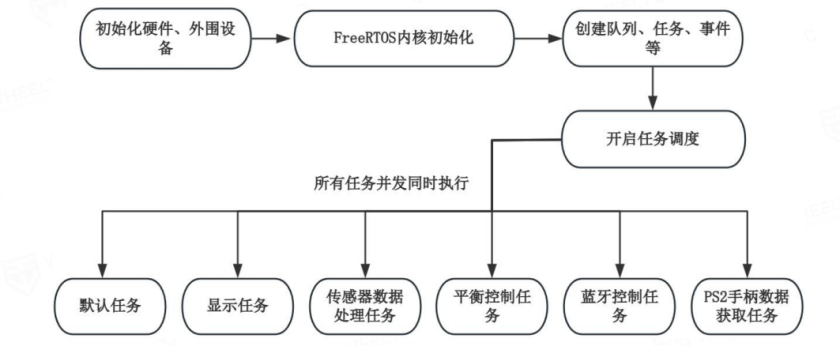
软件部分: 这个部分用图片展示,见下图。软件部分每个人设计的都不太一样,这个见仁见智。下面这个是轮趣科技提供的实现,可以作为参考。
3.飞行器的基本控制原理
在我们对飞行器进行控制之前,需要对其进行简易的坐标系建立和运动分析,如下图所示。(部分内容摘抄自轮趣科技的F570飞行器资料)
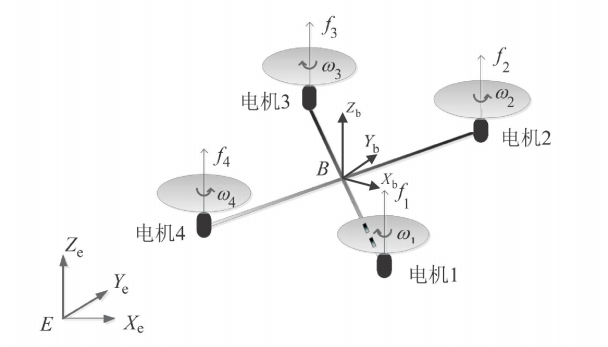
如上图所示,无人机的电机1、3桨叶为逆时针旋转,而2、4桨叶为顺时针旋转,因此当4个电机转速一致且升力之和等于机体自重时,无人机可以保持悬停,当升力同时增加或减少时,无人机可上升或下降。
当 4 个桨叶升力之和等于无人机自重时,机体处于受力平衡的悬停基础状态;在此基础上,通过调整不同电机的转速差改变升力分布,即可实现各类姿态运动,具体描述如下:
-
电机1、3增速(减速)且2、4减速(增速),由于转矩差的作用,无人机可实现偏航运动;
-
电机1、2增速(减速)且3、4减速(增速),无人机可实现俯仰运动;
-
电机1、4增速(减速)且2、3减速(增速),无人机可实现横滚运动。
-
将以上的基本动作进行组合,无人机可实现各种复杂运动。
通过上述的分析,我们可以使用数学建模的方式,对无人机进行动力学建模,进而使用LQR控制使其平衡。也可以使用单纯的电机运动分析,对飞行器做简单的PID控制,最终把PID计算的结果输入到电机使其平衡。轮趣科技赠送的资料里还贴心地提供了这两种算法,有详细的文档说明和STM32控制代码。
4.飞行器的控制算法设计
了解飞行器的基本控制原理后,就可以基于这个原理来设计控制器了,以下章节会简单介绍PID控制器和LQR控制器的实现方法:
PID控制器
在PID控制器中,不需要对四轴进行建模分析,只需要知道四轴的翻滚、旋转、上升与下降如何控制即可,这些控制内容在上面章节有提到。
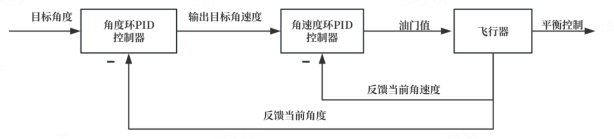
四轴飞行器一般会采用串级PID控制,其控制结构如下:外环控制器为角度环,输入为目标角度和实际角度,输出为角速度的目标值。外环特点是响应较慢,更侧重于整体的系统稳定,抑制累计误差等。内环控制器为角速度环,输入为外环的输出值和实际的角速度,输出为电机的油门值,其特点是响应快速,增加系统的抗干扰能力。整体的系统模型如下图所示:
其中串级的PID公式在C语言中可以表示如下:
cpp
//roll-外环(角度)
PID_Update(&rollPID,0,attitude.roll);
//pitch-外环(角度)
PID_Update(&pitchPID,0,attitude.pitch);
//yaw-外环(角度)
PID_Update(&yawPID,0,attitude.yaw);
//rollrate-内环(角速度)
PID_Update(&rollratePID,rollPID.output,imu_ori.gyro.x); //rollPID.output是Roll角度环的输出
//pitchrate-内环(角速度)
PID_Update(&pitchratePID,pitchPID.output,imu_ori.gyro.y);//pitchPID.output是Pitch角度环的输出
//yawrate-内环(角速度)
PID_Update(&yawratePID,yawPID.output,imu_ori.gyro.z);//yawPID.output是yaw角度环的输出有了串级PID控制器后,还需要对PID控制器输出整合到电机油门,完成最终的控制。在四轴飞行器的平衡控制中,一共需要3个串级的PID控制环,分别是Pitch方向的角速度、角度的串级、Roll方向的角速度、角度的串级、Yaw方向的角速度、角度的串级。我们假设3个串级PID的输出结果为 pitchrate_output、rollrate_output、yawrate_output,假设4个电机的控制量为m1、m2、m3、m4,参照章节-飞行器的基本控制原理中的控制描述,可以列出以下输出公式:
csharp
m1 = -rollrate_output - pitchrate_output + yawrate_output + basethro //basethro表示基础油门值
m2 = +rollrate_output - pitchrate_output - yawrate_output + basethro
m3 = +rollrate_output + pitchrate_output + yawrate_output + basethro
m4 = -rollrate_output + pitchrate_output - yawrate_output + basethro除了上述的串级PID公式和输出,我们还需要加上一个基础油门值,让飞行器的推力和自身重力平衡。所以最终公式里还需要加上这个basethro
LQR控制器
说明:本章部分内容摘抄自轮趣科技的F570飞行器资料。
LQR控制有别于PID,它需要对飞行器进行数学建模。我们以本文章节3-飞行器的基本控制原理里面的图示为例,对相关的符号作以下规定:
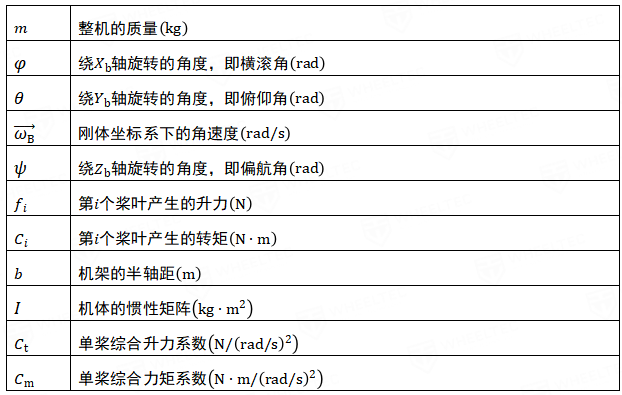
以 表示世界坐标系,
表示世界坐标系, 表示机体坐标系,定义世界坐标系的基向量为
表示机体坐标系,定义世界坐标系的基向量为 ,刚体坐标系的基向量为
,刚体坐标系的基向量为 ,欧拉角
,欧拉角 。采用
。采用 欧拉角表示法,则有从世界坐标系到机体坐标系的旋转矩阵:
欧拉角表示法,则有从世界坐标系到机体坐标系的旋转矩阵:

其中牛顿定律和欧拉方程为我们提供了6自由度刚体的移动和转动动力学方程如下:

合外力  由重力和4个旋翼产生的推力叠加而成:
由重力和4个旋翼产生的推力叠加而成:



则有
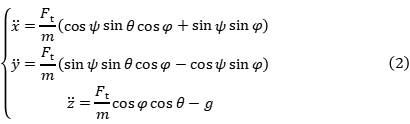
其中, 。
。
合力矩  由推力力矩和****4个电机给机身的反扭矩叠加而成:
由推力力矩和****4个电机给机身的反扭矩叠加而成:

其中
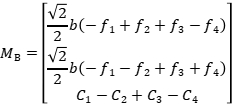
解得
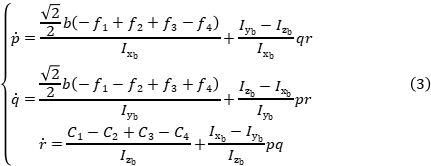
又因为欧拉角角速度与刚体坐标系下的角速度有如下的关系:
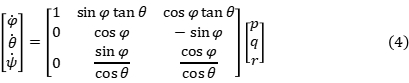
当无人机处于平衡状态的时候,可以认为

则式 变为
变为

联立式 ,则可得线性化后的模型:
,则可得线性化后的模型:

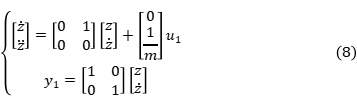
得到线性化的模型后,我们将该模型看成6个子系统,有3个关于位置的子系统,有3个关于姿态的子系统,由于在我们的产品中没有水平位置的传感器信息,因此这里只考虑高度子系统和3个关于姿态的子系统。则有以下4个状态空间表达式:
a) 升降运动子系统:
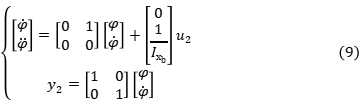
b) 横滚运动子系统:
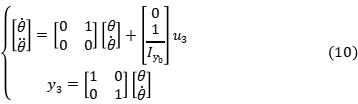
c) 俯仰运动子系统:
d) 偏航运动子系统:

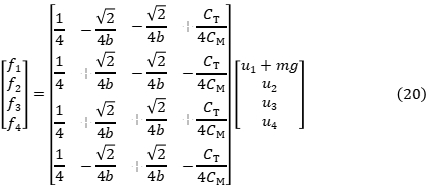
在获取到上述4个子系统后,就可以来设计LQR的飞行器系统控制器了。主要注意的是这里整个系统实际输入是4个电机的升力,其中桨叶和电机转速会有以下的关系:

通过上述两个式子,系统的实际输入可以表示为
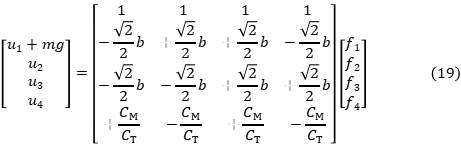
即
综上分析,最终的C语言实现代码如下:
c
//状态反馈系数
static const float k11 = 0.6276f;
static const float k12 = 0.4117f;
static const float k21 = 0.0521f;
static const float k22 = 0.0214f;
static const float k31 = 0.0521f;
static const float k32 = 0.0214f;
static const float k41 = 0.0105f;
static const float k42 = 0.0045f;
...
// 姿态控制器(包含了高度控制)
static void Attitude_Controller(const ATTITUDE_DATA_t* attitude, const IMU_DATA_t* imudata, const float Height, const float Height_dot, float motorf[4][1])
{
float u[4][1] = {0}; // 系统的输入量
float T[4][4] =
{{0.25f, -3.9284f, -3.9284f, 50.2828f},
{0.25f, 3.9284f, -3.9284f, -50.2828f},
{0.25f, 3.9284f, 3.9284f, 50.2828f},
{0.25f, -3.9284f, 3.9284f, -50.2828f}};
...
// LQR控制器
u[0][0] = -(k11 * (Height - FlyControl_height) + k12 * Height_dot) + height_to_weight(Height) + FlyControl_unuseHeight;
u[1][0] = -(k21 * (attitude -> roll + FlyControl_roll - roll_ref ) + k22 * imudata -> gyro.x);
u[2][0] = -(k31 * (attitude -> pitch + FlyControl_pitch - pitch_ref) + k32 * imudata -> gyro.y);
u[3][0] = -(k41 * (attitude -> yaw - FlyControl_yaw ) + k42 * (imudata -> gyro.z + FlyControl_gyroz));
// 系统的输入转换为4个电机的升力
mul(4, 4, 4, 1, (const float (*)[4])T, (const float (*)[1])u, motorf);
}
...