目录
- [1 强化学习的概念](#1 强化学习的概念)
- [2 多臂老虎机](#2 多臂老虎机)
-
- [2.1 问题介绍](#2.1 问题介绍)
- [2.2 ε-贪婪算法(ε-Greedy)](#2.2 ε-贪婪算法(ε-Greedy))
- [2.3 上置信界算法(UCB)](#2.3 上置信界算法(UCB))
- [2.4 汤普森采样(Thompson Sampling)](#2.4 汤普森采样(Thompson Sampling))
- [2.5 关于懊悔的说明](#2.5 关于懊悔的说明)
- [2.6 算法对比 & 与强化学习的关系](#2.6 算法对比 & 与强化学习的关系)
- [本部分 所有算法的代码](#本部分 所有算法的代码)
- [3 马尔可夫决策过程](#3 马尔可夫决策过程)
-
- [3.1 马尔可夫过程(MP)](#3.1 马尔可夫过程(MP))
- [3.2 马尔可夫奖励过程(MRP)](#3.2 马尔可夫奖励过程(MRP))
- [3.3 马尔可夫决策过程(MDP)](#3.3 马尔可夫决策过程(MDP))
- [3.4 蒙特卡洛方法](#3.4 蒙特卡洛方法)
- [3.5 占用度量](#3.5 占用度量)
- [3.6 最优策略](#3.6 最优策略)
- 总结1:三种过程的递进关系
- 总结2:最核心的公式
- 本部分的所有代码
- [4 动态规划算法](#4 动态规划算法)
-
- [4.1 简介](#4.1 简介)
- [4.2 悬崖漫步环境](#4.2 悬崖漫步环境)
- [4.3 策略迭代算法](#4.3 策略迭代算法)
-
- [4.3.1 策略评估](#4.3.1 策略评估)
- [4.3.2 策略提升](#4.3.2 策略提升)
- [4.3.3 策略迭代流程](#4.3.3 策略迭代流程)
- [4.4 价值迭代算法](#4.4 价值迭代算法)
- 本部分的代码
- [5 时序差分算法](#5 时序差分算法)
-
- [5.1 时序差分 vs 蒙特卡洛](#5.1 时序差分 vs 蒙特卡洛)
- [5.2 Sarsa 算法](#5.2 Sarsa 算法)
- [5.3 多步 Sarsa 算法](#5.3 多步 Sarsa 算法)
- [5.4 Q-learning 算法](#5.4 Q-learning 算法)
- [5.5 本章总结](#5.5 本章总结)
- 本部分的所有代码
- [6 Dyan-Q算法](#6 Dyan-Q算法)
-
- [6.1 核心概念](#6.1 核心概念)
- [6.2 算法流程](#6.2 算法流程)
- 本部分的所有代码
1 强化学习的概念
强化学习用智能体(agent)这个概念来表示做决策的机器。相比于有监督学习中的"模型",强化学习中的"智能体"强调机器不但可以感知周围的环境信息,还可以通过做决策来直接改变这个环境,而不只是给出一些预测信号。
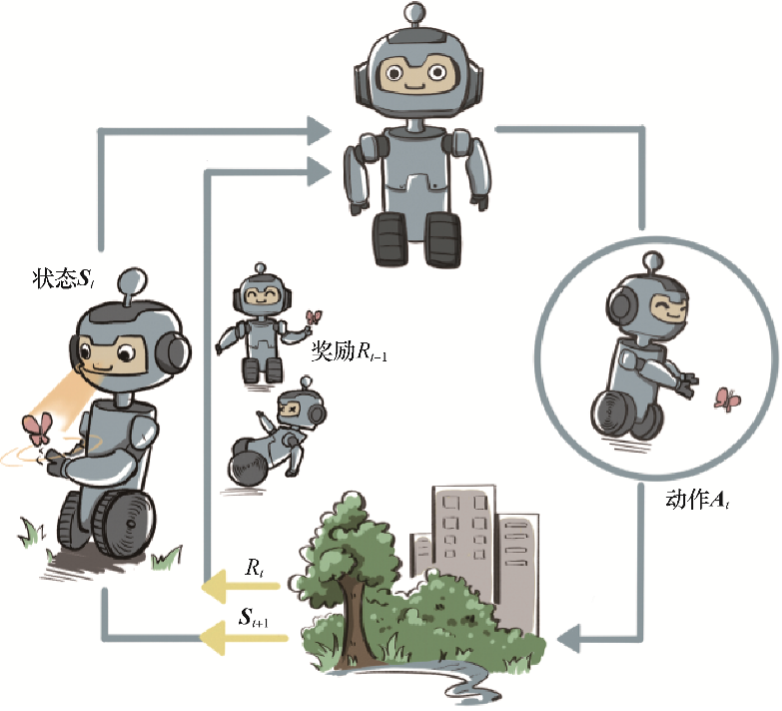
这里,智能体有3种关键要素,即感知、决策和奖励。
强化学习vs监督学习
这是一个非常精准且深刻的定义。为了帮你更好地理解和记忆,我将这段文字总结为核心区别 、形象比喻 和数学本质三个维度:
| 维度 | 监督学习 (Supervised Learning) | 强化学习 (Reinforcement Learning) |
|---|---|---|
| 核心目标 | 拟合数据 (Fitting Data) | 探索最优 (Exploring Optimal) |
| 关注点 | 寻找一个模型 ( f f f) | 寻找一个策略 ( π \pi π) |
| 数据视角 | 给定的 (Given):数据分布是固定的,不可改变。 | 产生的 (Generated):数据分布由智能体的行为决定,是动态变化的。 |
| 优化方向 | 最小化 损失函数的期望 (Error ↓ \downarrow ↓) | 最大化 奖励函数的期望 (Reward ↑ \uparrow ↑) |
| 交互方式 | 被动接收数据(看一眼,学一下)。 | 主动与环境交互(试一下,看反馈)。 |
2 多臂老虎机
2.1 问题介绍
场景:面前有一台 K 根拉杆的老虎机,每根拉杆对应不同的奖励概率分布(未知)。目标是在有限次操作内获得尽可能高的累积奖励。
核心挑战:探索与利用的平衡
- 探索(Exploration):尝试不同拉杆,了解奖励分布
- 利用(Exploitation):选择当前已知最优的拉杆
形式化定义:
- 动作集合: A = { a 1 , a 2 , . . . , a K } \mathcal{A} = \{a_1, a_2, ..., a_K\} A={a1,a2,...,aK}
- 奖励分布:拉动拉杆 a k a_k ak 获得的奖励 r r r 服从概率分布 R ( r ∣ a k ) \mathcal{R}(r|a_k) R(r∣ak)
- 目标:最大化累积奖励 ∑ t = 1 T r t \sum_{t=1}^{T} r_t ∑t=1Trt
期望奖励与最优期望:
- 动作 a a a 的期望奖励: Q ( a ) = E r ∣ a Q(a) = \mathbb{E}r\|a Q(a)=Er∣a
- 最优期望奖励: Q ∗ = max a ∈ A Q ( a ) Q^* = \max_{a \in \mathcal{A}} Q(a) Q∗=maxa∈AQ(a)
懊悔与累积懊悔:
- 单步懊悔: R ( a ) = Q ∗ − Q ( a ) R(a) = Q^* - Q(a) R(a)=Q∗−Q(a)
- 累积懊悔: σ R = ∑ t = 1 T R ( a t ) = ∑ t = 1 T ( Q ∗ − Q ( a t ) ) \sigma_R = \sum_{t=1}^{T} R(a_t) = \sum_{t=1}^{T} (Q^* - Q(a_t)) σR=∑t=1TR(at)=∑t=1T(Q∗−Q(at))
目标"最大化累积奖励"等价于"最小化累积懊悔"。
原因:
累积奖励 :
∑ t = 1 T Q ( a t ) \sum_{t=1}^{T} Q(a_t) t=1∑TQ(at)
累积懊悔 :
σ R = ∑ t = 1 T ( Q ∗ − Q ( a t ) ) = T ⋅ Q ∗ − ∑ t = 1 T Q ( a t ) \sigma_R = \sum_{t=1}^{T} (Q^* - Q(a_t)) = T \cdot Q^* - \sum_{t=1}^{T} Q(a_t) σR=t=1∑T(Q∗−Q(at))=T⋅Q∗−t=1∑TQ(at)因为 T ⋅ Q ∗ T \cdot Q^* T⋅Q∗ 是一个常数(总步数 × 最优期望奖励),所以:
σ R = T ⋅ Q ∗ ⏟ 常数 − ∑ t = 1 T Q ( a t ) ⏟ 累积奖励 \sigma_R = \underbrace{T \cdot Q^*}{\text{常数}} - \underbrace{\sum{t=1}^{T} Q(a_t)}_{\text{累积奖励}} σR=常数 T⋅Q∗−累积奖励 t=1∑TQ(at)当累积奖励越大时,累积懊悔就越小;当累积奖励越小时,累积懊悔就越大。
所以最大化累积奖励 和最小化累积懊悔是完全等价的目标。
为什么用懊悔而不是奖励?用懊悔来衡量有一个好处:它能直观反映算法和"最优策略"之间的差距。如果累积懊悔增长慢(比如对数增长),说明算法很快就能找到最优拉杆并持续利用它。
期望奖励估计的增量更新公式:
Q k = Q k − 1 + 1 k ( r k − Q k − 1 ) Q_k = Q_{k-1} + \frac{1}{k}(r_k - Q_{k-1}) Qk=Qk−1+k1(rk−Qk−1)
推导过程:
Q k = 1 k ∑ i = 1 k r i = 1 k ( r k + ∑ i = 1 k − 1 r i ) = 1 k ( r k + ( k − 1 ) Q k − 1 ) = 1 k r k + k − 1 k Q k − 1 = 1 k r k + Q k − 1 − 1 k Q k − 1 = Q k − 1 + 1 k ( r k − Q k − 1 ) \begin{aligned} Q_k &= \frac{1}{k} \sum_{i=1}^{k} r_i \\ &= \frac{1}{k} \left( r_k + \sum_{i=1}^{k-1} r_i \right) \\ &= \frac{1}{k} \left( r_k + (k-1) Q_{k-1} \right) \\ &= \frac{1}{k} r_k + \frac{k-1}{k} Q_{k-1} \\ &= \frac{1}{k} r_k + Q_{k-1} - \frac{1}{k} Q_{k-1} \\ &= Q_{k-1} + \frac{1}{k}(r_k - Q_{k-1}) \end{aligned} Qk=k1i=1∑kri=k1(rk+i=1∑k−1ri)=k1(rk+(k−1)Qk−1)=k1rk+kk−1Qk−1=k1rk+Qk−1−k1Qk−1=Qk−1+k1(rk−Qk−1)
这样每次更新只需 O ( 1 ) O(1) O(1) 的时间和空间复杂度。
2.2 ε-贪婪算法(ε-Greedy)
思想:以小概率探索,大概率利用
策略:
a t = { arg max a Q ^ ( a ) 以概率 1 − ϵ (利用) 随机选择 以概率 ϵ (探索) a_t = \begin{cases} \arg\max_a \hat{Q}(a) & \text{以概率 } 1-\epsilon \text{(利用)} \\ \text{随机选择} & \text{以概率 } \epsilon \text{(探索)} \end{cases} at={argmaxaQ^(a)随机选择以概率 1−ϵ(利用)以概率 ϵ(探索)
改进:ε 衰减
ϵ t = 1 t \epsilon_t = \frac{1}{t} ϵt=t1
性能:
- 固定 ε:累积懊悔线性增长 O ( T ) O(T) O(T)
- ε 衰减:累积懊悔次线性增长 O ( log T ) O(\log T) O(logT)
懊悔分析:
随机探索的平均懊悔为 Δ ˉ = 1 K ∑ k = 1 K ( Q ∗ − Q ( a k ) ) \bar{\Delta} = \frac{1}{K} \sum_{k=1}^{K} (Q^* - Q(a_k)) Δˉ=K1∑k=1K(Q∗−Q(ak))
- 固定 ε :每步期望懊悔为 ϵ ⋅ Δ ˉ \epsilon \cdot \bar{\Delta} ϵ⋅Δˉ,T 步累积懊悔为 T ⋅ ϵ ⋅ Δ ˉ T \cdot \epsilon \cdot \bar{\Delta} T⋅ϵ⋅Δˉ,呈线性增长
- ε 衰减 ( ϵ t = 1 / t \epsilon_t = 1/t ϵt=1/t):累积懊悔为 Δ ˉ ∑ t = 1 T 1 t ≈ Δ ˉ ln T \bar{\Delta} \sum_{t=1}^{T} \frac{1}{t} \approx \bar{\Delta} \ln T Δˉ∑t=1Tt1≈ΔˉlnT,呈对数增长
其中 ∑ t = 1 T 1 t ≈ ln T \sum_{t=1}^{T} \frac{1}{t} \approx \ln T ∑t=1Tt1≈lnT 是调和级数的近似(由积分 ∫ 1 T 1 x d x = ln T \int_1^T \frac{1}{x}dx = \ln T ∫1Tx1dx=lnT 得到)。
2.3 上置信界算法(UCB)
思想:不确定性越大,越值得探索("乐观面对不确定性")
策略:
a t = arg max a Q \^ ( a ) + c ln t 2 N ( a ) a_t = \arg\max_a \left \\hat{Q}(a) + c\\sqrt{\\frac{\\ln t}{2N(a)}} \\right at=argamaxQ\^(a)+c2N(a)lnt
其中:
- Q ^ ( a ) \hat{Q}(a) Q^(a):动作 a a a 的期望奖励估计值
- N ( a ) N(a) N(a):动作 a a a 被选择的次数
- t t t:当前总步数
- c c c:探索系数
直观理解:
- 被选次数少 → 不确定性项大 → UCB 值高 → 更可能被选中探索
- 被选次数多 → 不确定性项小 → 主要看期望估计值
性能 :累积懊悔对数增长 O ( log T ) O(\log T) O(logT)
懊悔分析 :不确定性项 ln t N ( a ) \sqrt{\frac{\ln t}{N(a)}} N(a)lnt 随选择次数增加而减小,次优拉杆被选次数有上界约 O ( ln T ) O(\ln T) O(lnT),总懊悔为 O ( log T ) O(\log T) O(logT)。
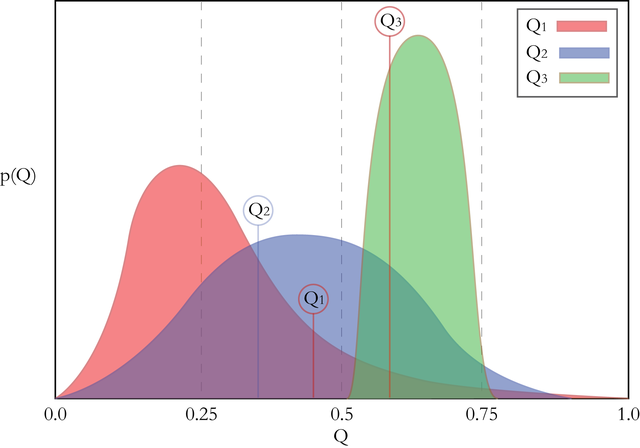
2.4 汤普森采样(Thompson Sampling)
思想:用概率分布描述不确定性,通过采样做决策
策略(针对伯努利老虎机):
- 对每个动作 a a a,维护成功次数 α a \alpha_a αa 和失败次数 β a \beta_a βa
- 从每个动作的 Beta 分布中采样: θ a ∼ Beta ( α a + 1 , β a + 1 ) \theta_a \sim \text{Beta}(\alpha_a + 1, \beta_a + 1) θa∼Beta(αa+1,βa+1)
- 选择采样值最大的动作: a t = arg max a θ a a_t = \arg\max_a \theta_a at=argmaxaθa
- 更新:若获奖则 α a ← α a + 1 \alpha_a \leftarrow \alpha_a + 1 αa←αa+1,否则 β a ← β a + 1 \beta_a \leftarrow \beta_a + 1 βa←βa+1
直观理解:
- 选择次数少 → Beta 分布宽 → 采样值波动大 → 有机会采样到高值被探索
- 选择次数多 → Beta 分布窄 → 采样值稳定 → 收敛到真实期望
性能 :累积懊悔对数增长 O ( log T ) O(\log T) O(logT)
懊悔分析 :随着采样次数增加,Beta 分布逐渐集中在真实概率附近,次优拉杆采样值超过最优拉杆的概率越来越小,总懊悔为 O ( log T ) O(\log T) O(logT)。
2.5 关于懊悔的说明
Q ∗ Q^* Q∗ 是真实的最优期望奖励 ,由环境决定,固定不变但未知。懊悔是理论分析工具,不是算法运行时需要计算的:
| 场景 | 是否知道 Q ∗ Q^* Q∗ | 懊悔的作用 |
|---|---|---|
| 理论分析 | 假设存在 | 证明算法性能上界 |
| 实验仿真 | 人为设定,已知 | 画图比较算法 |
| 真实应用 | 不知道 | 不需要算,直接跑算法 |
算法本身只依赖估计值 Q ^ ( a ) \hat{Q}(a) Q^(a),不需要知道 Q ∗ Q^* Q∗。
2.6 算法对比 & 与强化学习的关系
| 算法 | 探索机制 | 累积懊悔增长 |
|---|---|---|
| ε-贪婪(固定 ε) | 随机探索 | 线性 O ( T ) O(T) O(T) |
| ε-贪婪(ε 衰减) | 随机探索,逐渐减少 | 对数 O ( log T ) O(\log T) O(logT) |
| UCB | 基于不确定性上界 | 对数 O ( log T ) O(\log T) O(logT) |
| Thompson Sampling | 基于概率分布采样 | 对数 O ( log T ) O(\log T) O(logT) |
累积懊悔的"复杂度"其实不是时间复杂度
这里的 O ( log T ) O(\log T) O(logT) 或 O ( T ) O(T) O(T) 描述的是累积懊悔随步数 T 增长的速度 ,不是计算需要多少时间。
举例:
假设 Δ ˉ = 0.1 \bar{\Delta} = 0.1 Δˉ=0.1(平均每次选错的损失)
步数 T 固定 ε=0.1 的懊悔 O ( T ) O(T) O(T) ε 衰减的懊悔 O ( log T ) O(\log T) O(logT) 10 10 × 0.1 × 0.1 = 0.1 10 \times 0.1 \times 0.1 = 0.1 10×0.1×0.1=0.1 0.1 × ln 10 ≈ 0.23 0.1 \times \ln 10 \approx 0.23 0.1×ln10≈0.23 100 100 × 0.1 × 0.1 = 1 100 \times 0.1 \times 0.1 = 1 100×0.1×0.1=1 0.1 × ln 100 ≈ 0.46 0.1 \times \ln 100 \approx 0.46 0.1×ln100≈0.46 1000 1000 × 0.1 × 0.1 = 10 1000 \times 0.1 \times 0.1 = 10 1000×0.1×0.1=10 0.1 × ln 1000 ≈ 0.69 0.1 \times \ln 1000 \approx 0.69 0.1×ln1000≈0.69 10000 10000 × 0.1 × 0.1 = 100 10000 \times 0.1 \times 0.1 = 100 10000×0.1×0.1=100 0.1 × ln 10000 ≈ 0.92 0.1 \times \ln 10000 \approx 0.92 0.1×ln10000≈0.92 因此 O ( T ) O(T) O(T):步数增加 10 倍,懊悔也增加约 10 倍(线性), O ( log T ) O(\log T) O(logT):步数增加 10 倍,懊悔只增加一点点(对数)
多臂老虎机是无状态的强化学习 ------每次交互不会改变环境。强化学习在此基础上引入状态,形成马尔可夫决策过程(MDP)。
本部分 所有算法的代码
python
# 导入需要使用的库,其中numpy是支持数组和矩阵运算的科学计算库,而matplotlib是绘图库
import numpy as np
import matplotlib.pyplot as plt
class BernoulliBandit:
""" 伯努利多臂老虎机,输入K表示拉杆个数 """
def __init__(self, K):
self.probs = np.random.uniform(size=K) # 随机生成K个0~1的数,作为拉动每根拉杆的获奖
print("各拉杆的获奖概率分别为:", np.round(self.probs, 4))
# 概率
self.best_idx = np.argmax(self.probs) # 获奖概率最大的拉杆
self.best_prob = self.probs[self.best_idx] # 最大的获奖概率
self.K = K
def step(self, k):
# 当玩家选择了k号拉杆后,根据拉动该老虎机的k号拉杆获得奖励的概率返回1(获奖)或0(未
# 获奖)
if np.random.rand() < self.probs[k]:
print("拉动了%d号拉杆,获得奖励1" % k)
return 1
else:
return 0
class Solver:
""" 多臂老虎机算法基本框架 """
def __init__(self, bandit):
self.bandit = bandit
self.counts = np.zeros(self.bandit.K) # 每根拉杆的尝试次数
self.regret = 0. # 当前步的累积懊悔
self.actions = [] # 维护一个列表,记录每一步的动作
self.regrets = [] # 维护一个列表,记录每一步的累积懊悔
def update_regret(self, k):
# 计算累积懊悔并保存,k为本次动作选择的拉杆的编号
self.regret += self.bandit.best_prob - self.bandit.probs[k]
self.regrets.append(self.regret)
def run_one_step(self):
# 返回当前动作选择哪一根拉杆,由每个具体的策略实现
raise NotImplementedError
def run(self, num_steps):
# 运行一定次数,num_steps为总运行次数
for _ in range(num_steps):
k = self.run_one_step()
self.counts[k] += 1
self.actions.append(k)
self.update_regret(k)
class EpsilonGreedy(Solver):
""" epsilon贪婪算法,继承Solver类 """
def __init__(self, bandit, epsilon=0.01, init_prob=1.0):
super(EpsilonGreedy, self).__init__(bandit)
self.epsilon = epsilon
#初始化拉动所有拉杆的期望奖励估值
self.estimates = np.array([init_prob] * self.bandit.K)
def run_one_step(self):
if np.random.random() < self.epsilon:
k = np.random.randint(0, self.bandit.K) # 随机选择一根拉杆
else:
k = np.argmax(self.estimates) # 选择期望奖励估值最大的拉杆
r = self.bandit.step(k) # 得到本次动作的奖励
self.estimates[k] += 1. / (self.counts[k] + 1) * (r - self.estimates[k])
return k
class DecayingEpsilonGreedy(Solver):
""" epsilon值随时间衰减的epsilon-贪婪算法,继承Solver类 """
def __init__(self, bandit, init_prob=1.0):
super(DecayingEpsilonGreedy, self).__init__(bandit)
self.estimates = np.array([init_prob] * self.bandit.K)
self.total_count = 0
def run_one_step(self):
self.total_count += 1
epsilon = 1 / (1 + 0.001 * self.total_count) # 改用更慢的衰减方式,而不是1/t
if np.random.random() < epsilon:
k = np.random.randint(0, self.bandit.K)
else:
k = np.argmax(self.estimates)
r = self.bandit.step(k)
self.estimates[k] += 1. / (self.counts[k] + 1) * (r - self.estimates[k])
return k
class UCB(Solver):
""" UCB算法,继承Solver类 """
def __init__(self, bandit, coef, init_prob=1.0):
super(UCB, self).__init__(bandit)
self.total_count = 0
self.estimates = np.array([init_prob] * self.bandit.K)
self.coef = coef
def run_one_step(self):
self.total_count += 1
ucb = self.estimates + self.coef * np.sqrt(
np.log(self.total_count) / (2 * (self.counts + 1))) # 计算上置信界
k = np.argmax(ucb) # 选出上置信界最大的拉杆
r = self.bandit.step(k)
self.estimates[k] += 1. / (self.counts[k] + 1) * (r - self.estimates[k])
return k
class ThompsonSampling(Solver):
""" 汤普森采样算法,继承Solver类 """
def __init__(self, bandit):
super(ThompsonSampling, self).__init__(bandit)
self._a = np.ones(self.bandit.K) # 列表,表示每根拉杆奖励为1的次数
self._b = np.ones(self.bandit.K) # 列表,表示每根拉杆奖励为0的次数
def run_one_step(self):
samples = np.random.beta(self._a, self._b) # 按照Beta分布采样一组奖励样本
k = np.argmax(samples) # 选出采样奖励最大的拉杆
r = self.bandit.step(k)
self._a[k] += r # 更新Beta分布的第一个参数
self._b[k] += (1 - r) # 更新Beta分布的第二个参数
return k
# ==============================
def plot_results(solvers, solver_names):
"""生成累积懊悔随时间变化的图像。输入solvers是一个列表,列表中的每个元素是一种特定的策略。
而solver_names也是一个列表,存储每个策略的名称"""
for idx, solver in enumerate(solvers):
time_list = range(len(solver.regrets))
plt.plot(time_list, solver.regrets, label=solver_names[idx])
plt.xlabel('Time steps')
plt.ylabel('Cumulative regrets')
plt.title('%d-armed bandit' % solvers[0].bandit.K)
plt.legend()
plt.show()
# ===============主函数==================
np.random.seed(1)
K = 10
bandit_10_arm = BernoulliBandit(K)
print("随机生成了一个%d臂伯努利老虎机" % K)
print("获奖概率最大的拉杆为%d号,其获奖概率为%.4f" %
(bandit_10_arm.best_idx, bandit_10_arm.best_prob))
print('-' * 50)
# 运行epsilon-贪婪算法
epsilon_greedy_solver = EpsilonGreedy(bandit_10_arm, epsilon=0.01)
epsilon_greedy_solver.run(5000)
print('epsilon-贪婪算法的累积懊悔为:', epsilon_greedy_solver.regret)
plot_results([epsilon_greedy_solver], ["EpsilonGreedy"])
print('-' * 50)
# 运行不同epsilon值的epsilon-贪婪算法进行对比
epsilons = [1e-4, 0.01, 0.1, 0.25, 0.5]
epsilon_greedy_solver_list = [
EpsilonGreedy(bandit_10_arm, epsilon=e) for e in epsilons
]
epsilon_greedy_solver_names = ["epsilon={}".format(e) for e in epsilons]
for solver in epsilon_greedy_solver_list:
solver.run(5000)
# plot_results(epsilon_greedy_solver_list, epsilon_greedy_solver_names)
# 运行epsilon值衰减的epsilon-贪婪算法
decaying_epsilon_greedy_solver = DecayingEpsilonGreedy(bandit_10_arm)
decaying_epsilon_greedy_solver.run(5000)
print('epsilon值衰减的贪婪算法的累积懊悔为:', decaying_epsilon_greedy_solver.regret)
plot_results([decaying_epsilon_greedy_solver], ["DecayingEpsilonGreedy"])
# 在运行结束后,检查算法是否找到了最优拉杆
print("各拉杆被选择的次数:", decaying_epsilon_greedy_solver.counts)
print("最优拉杆编号:", bandit_10_arm.best_idx)
print("各拉杆的期望估计值:", np.round(decaying_epsilon_greedy_solver.estimates, 4))
# 运行上置信界算法
coef = 1 # 控制不确定性比重的系数
UCB_solver = UCB(bandit_10_arm, coef)
UCB_solver.run(5000)
print('上置信界算法的累积懊悔为:', UCB_solver.regret)
plot_results([UCB_solver], ["UCB"])
# 运行汤普森采样算法
thompson_sampling_solver = ThompsonSampling(bandit_10_arm)
thompson_sampling_solver.run(5000)
print('汤普森采样算法的累积懊悔为:', thompson_sampling_solver.regret)
plot_results([thompson_sampling_solver], ["ThompsonSampling"])3 马尔可夫决策过程
3.1 马尔可夫过程(MP)
组成元素
| 符号 | 含义 | 例子 |
|---|---|---|
| S S S | 状态集合 | { s 1 , s 2 , s 3 , s 4 , s 5 , s 6 } \{s_1, s_2, s_3, s_4, s_5, s_6\} {s1,s2,s3,s4,s5,s6} |
| P P P | 状态转移矩阵 | P ( s j ∣ s i ) P(s_j | s_i) P(sj∣si) = 从 s i s_i si 到 s j s_j sj 的概率 |
核心性质(马尔可夫性质):下一状态只取决于当前状态,与历史无关。无公式,只需理解概念。
3.2 马尔可夫奖励过程(MRP)
组成元素
| 符号 | 含义 | 例子 |
|---|---|---|
| S S S | 状态集合 | { s 1 , s 2 , . . . } \{s_1, s_2, ...\} {s1,s2,...} |
| P P P | 状态转移矩阵 | P ( s ′ ∣ s ) P(s' | s) P(s′∣s) |
| R ( s ) R(s) R(s) | 奖励函数(在节点上) | R ( s 4 ) = 10 R(s_4) = 10 R(s4)=10 |
| γ \gamma γ | 折扣因子 | 0.5 0.5 0.5 |
| G t G_t Gt | 回报(从 t t t 时刻开始往未来的累计奖励) | 一条轨迹的总收益 |
| V ( s ) V(s) V(s) | 价值函数(回报的期望) | 从 s s s 出发平均能拿多少 |
R、G、V 的关系
| 符号 | 名称 | 一句话解释 |
|---|---|---|
| R R R | 奖励 | 这一步拿了多少 |
| G G G | 回报 | 这一局往后总共能拿多少 |
| V V V | 价值 | 平均每局能拿多少 |
R(单步奖励)
↓ 累加(带折扣)
G(一条轨迹的总回报)
↓ 求期望
V(平均回报)核心公式
回报的定义:
G t = R t + γ R t + 1 + γ 2 R t + 2 + ⋯ G_t = R_t + \gamma R_{t+1} + \gamma^2 R_{t+2} + \cdots Gt=Rt+γRt+1+γ2Rt+2+⋯
回报的递归形式:
G t = R t + γ G t + 1 G_t = R_t + \gamma G_{t+1} Gt=Rt+γGt+1
价值函数:
V ( s ) = E G t ∣ S t = s V(s) = \mathbb{E}G_t \| S_t = s V(s)=EGt∣St=s
贝尔曼方程:
V ( s ) = R ( s ) + γ ∑ s ′ P ( s ′ ∣ s ) V ( s ′ ) V(s) = R(s) + \gamma \sum_{s'} P(s'|s) V(s') V(s)=R(s)+γs′∑P(s′∣s)V(s′)
矩阵形式:
V = R + γ P V \mathcal{V} = \mathcal{R} + \gamma \mathcal{P} \mathcal{V} V=R+γPV
解析解:
V = ( I − γ P ) − 1 R \mathcal{V} = (\mathbf{I} - \gamma \mathcal{P})^{-1} \mathcal{R} V=(I−γP)−1R
3.3 马尔可夫决策过程(MDP)
组成元素
| 符号 | 含义 | 例子 |
|---|---|---|
| S S S | 状态集合 | { s 1 , s 2 , s 3 , s 4 , s 5 } \{s_1, s_2, s_3, s_4, s_5\} {s1,s2,s3,s4,s5} |
| A A A | 动作集合 | { 保持 , 前往 , . . . } \{\text{保持}, \text{前往}, ...\} {保持,前往,...} |
| P ( s ′ ∣ s , a ) P(s'|s,a) P(s′∣s,a) | 状态转移函数 | 在 s s s 选 a a a 后到 s ′ s' s′ 的概率 |
| R ( s , a ) R(s,a) R(s,a) | 奖励函数(在边上) | R ( s 4 , 前往 s 5 ) = 10 R(s_4, \text{前往}s_5) = 10 R(s4,前往s5)=10 |
| γ \gamma γ | 折扣因子 | 0.5 0.5 0.5 |
| π ( a ∣ s ) \pi(a|s) π(a∣s) | 策略(在状态 s s s 选动作 a a a 的概率) | π ( 前往 s 5 ∣ s 4 ) = 0.5 \pi(\text{前往}s_5 | s_4) = 0.5 π(前往s5∣s4)=0.5 |
| G t G_t Gt | 回报 | 同 MRP |
| V π ( s ) V^\pi(s) Vπ(s) | 状态价值函数 | 用策略 π \pi π,从 s s s 出发的期望回报 |
| Q π ( s , a ) Q^\pi(s,a) Qπ(s,a) | 动作价值函数 | 用策略 π \pi π,在 s s s 选 a a a 的期望回报 |
MRP vs MDP 对比
| MRP | MDP | |
|---|---|---|
| 奖励在哪 | 节点上 R ( s ) R(s) R(s) | 边上 R ( s , a ) R(s,a) R(s,a) |
| 转移概率 | P ( s ′ ∣ s ) P(s'|s) P(s′∣s) | P ( s ′ ∣ s , a ) P(s'|s,a) P(s′∣s,a) |
| 有无动作 | 无 | 有 |
| 价值函数 | V ( s ) V(s) V(s) | V π ( s ) V^\pi(s) Vπ(s)(依赖策略) |
V 和 Q 的区别
| V π ( s ) V^\pi(s) Vπ(s) | Q π ( s , a ) Q^\pi(s,a) Qπ(s,a) | |
|---|---|---|
| 问的问题 | 在状态 s s s,未来能拿多少? | 在状态 s s s 选动作 a a a,未来能拿多少? |
| 输入 | 状态 s s s | 状态 s s s + 动作 a a a |
核心公式
状态价值函数:
V π ( s ) = E π G t ∣ S t = s V^\pi(s) = \mathbb{E}_\piG_t \| S_t = s Vπ(s)=EπGt∣St=s
动作价值函数:
Q π ( s , a ) = E π G t ∣ S t = s , A t = a Q^\pi(s,a) = \mathbb{E}_\piG_t \| S_t = s, A_t = a Qπ(s,a)=EπGt∣St=s,At=a
V 和 Q 的关系:
V π ( s ) = ∑ a π ( a ∣ s ) ⋅ Q π ( s , a ) V^\pi(s) = \sum_a \pi(a|s) \cdot Q^\pi(s,a) Vπ(s)=a∑π(a∣s)⋅Qπ(s,a)
Q π ( s , a ) = R ( s , a ) + γ ∑ s ′ P ( s ′ ∣ s , a ) V π ( s ′ ) Q^\pi(s,a) = R(s,a) + \gamma \sum_{s'} P(s'|s,a) V^\pi(s') Qπ(s,a)=R(s,a)+γs′∑P(s′∣s,a)Vπ(s′)
贝尔曼期望方程:
V π ( s ) = ∑ a π ( a ∣ s ) R ( s , a ) + γ ∑ s ′ P ( s ′ ∣ s , a ) V π ( s ′ ) V^\pi(s) = \sum_a \pi(a|s) \left R(s,a) + \\gamma \\sum_{s'} P(s'\|s,a) V\^\\pi(s') \\right Vπ(s)=a∑π(a∣s)R(s,a)+γs′∑P(s′∣s,a)Vπ(s′)
MDP → MRP 转化(边缘化)
奖励边缘化(边上 → 节点上):
R M R P ( s ) = ∑ a π ( a ∣ s ) ⋅ R ( s , a ) R_{MRP}(s) = \sum_a \pi(a|s) \cdot R(s,a) RMRP(s)=a∑π(a∣s)⋅R(s,a)
转移概率边缘化:
P M R P ( s ′ ∣ s ) = ∑ a π ( a ∣ s ) ⋅ P ( s ′ ∣ s , a ) P_{MRP}(s'|s) = \sum_a \pi(a|s) \cdot P(s'|s,a) PMRP(s′∣s)=a∑π(a∣s)⋅P(s′∣s,a)
3.4 蒙特卡洛方法
核心思想:不用公式推导,直接做实验求平均。
需要的变量
| 符号 | 含义 |
|---|---|
| N ( s ) N(s) N(s) | 状态 s s s 被访问的次数 |
| G G G | 回报 |
核心公式
价值估计:
V ( s ) ≈ 1 N ( s ) ∑ i = 1 N ( s ) G i ( s ) V(s) \approx \frac{1}{N(s)} \sum_{i=1}^{N(s)} G_i(s) V(s)≈N(s)1i=1∑N(s)Gi(s)
增量更新:
V ( s ) ← V ( s ) + 1 N ( s ) ( G − V ( s ) ) V(s) \leftarrow V(s) + \frac{1}{N(s)}(G - V(s)) V(s)←V(s)+N(s)1(G−V(s))
算法步骤
1. 采样很多条轨迹
2. 对每条轨迹,从后往前计算每个状态的回报 G
(因为 G_t = R_t + γG_{t+1},必须先知道后面的)
3. 更新该状态的价值(取平均)和解析解对比
| 解析解 | 蒙特卡洛 | |
|---|---|---|
| 需要知道 | 转移概率 P、奖励 R | 不需要!只要能玩游戏 |
| 计算方式 | 矩阵求逆 | 采样 + 求平均 |
| 结果 | 精确 | 近似(采样越多越准) |
3.5 占用度量
核心概念
| 符号 | 含义 | 一句话解释 |
|---|---|---|
| ν π ( s ) \nu^\pi(s) νπ(s) | 状态访问分布 | 用策略 π \pi π 访问状态 s s s 的频率 |
| ρ π ( s , a ) \rho^\pi(s,a) ρπ(s,a) | 占用度量 | 用策略 π \pi π 访问 ( s , a ) (s,a) (s,a) 的频率 |
核心公式
ρ π ( s , a ) = ν π ( s ) ⋅ π ( a ∣ s ) \rho^\pi(s,a) = \nu^\pi(s) \cdot \pi(a|s) ρπ(s,a)=νπ(s)⋅π(a∣s)
ν π ( s ) = ∑ a ρ π ( s , a ) \nu^\pi(s) = \sum_a \rho^\pi(s,a) νπ(s)=a∑ρπ(s,a)
直观理解 :玩 1000 步游戏,统计 ν π ( s 4 ) = 0.1 \nu^\pi(s_4) = 0.1 νπ(s4)=0.1 表示 10% 的时间在状态 s 4 s_4 s4, ρ π ( s 4 , 前往 s 5 ) = 0.05 \rho^\pi(s_4, \text{前往}s_5) = 0.05 ρπ(s4,前往s5)=0.05 表示 5% 的时间在" s 4 s_4 s4 选前往 s 5 s_5 s5"。
为什么需要? 策略告诉你"怎么选",占用度量告诉你"实际会在哪里花时间"。
3.6 最优策略
核心概念
| 符号 | 含义 |
|---|---|
| V ∗ ( s ) V^*(s) V∗(s) | 最优状态价值:所有策略中最大的 V V V |
| Q ∗ ( s , a ) Q^*(s,a) Q∗(s,a) | 最优动作价值:所有策略中最大的 Q Q Q |
| π ∗ \pi^* π∗ | 最优策略:能达到最优价值的策略 |
核心公式
最优价值定义:
V ∗ ( s ) = max π V π ( s ) V^*(s) = \max_\pi V^\pi(s) V∗(s)=πmaxVπ(s)
Q ∗ ( s , a ) = max π Q π ( s , a ) Q^*(s,a) = \max_\pi Q^\pi(s,a) Q∗(s,a)=πmaxQπ(s,a)
最优策略:
π ∗ ( s ) = arg max a Q ∗ ( s , a ) \pi^*(s) = \arg\max_a Q^*(s,a) π∗(s)=argamaxQ∗(s,a)
贝尔曼最优方程:
V ∗ ( s ) = max a R ( s , a ) + γ ∑ s ′ P ( s ′ ∣ s , a ) V ∗ ( s ′ ) V^*(s) = \max_a \left R(s,a) + \\gamma \\sum_{s'} P(s'\|s,a) V\^\*(s') \\right V∗(s)=amaxR(s,a)+γs′∑P(s′∣s,a)V∗(s′)
贝尔曼期望方程 vs 贝尔曼最优方程
| 贝尔曼期望方程 | 贝尔曼最优方程 | |
|---|---|---|
| 对动作 | ∑ a π ( a ∣ s ) ⋯ \sum_a \pi(a|s)\\cdots ∑aπ(a∣s)⋯(按策略加权) | max a ⋯ \max_a \\cdots maxa⋯(选最好的) |
| 求的是 | 某个策略的价值 | 最优价值 |
总结1:三种过程的递进关系
马尔可夫过程 (MP):S, P
↓ + 奖励 R、折扣 γ
马尔可夫奖励过程 (MRP):S, P, R, γ
↓ + 动作 A、策略 π
马尔可夫决策过程 (MDP):S, A, P, R, γ, π总结2:最核心的公式
| 名称 | 公式 | 一句话解释 |
|---|---|---|
| 回报 | G t = R t + γ G t + 1 G_t = R_t + \gamma G_{t+1} Gt=Rt+γGt+1 | 当前奖励 + 折扣×未来回报 |
| MRP贝尔曼 | V ( s ) = R ( s ) + γ ∑ s ′ P ( s ′ ∣ s ) V ( s ′ ) V(s) = R(s) + \gamma \sum_{s'} P(s'|s) V(s') V(s)=R(s)+γ∑s′P(s′∣s)V(s′) | 价值 = 即时奖励 + 折扣×下一状态价值期望 |
| V和Q关系 | V π ( s ) = ∑ a π ( a ∣ s ) Q π ( s , a ) V^\pi(s) = \sum_a \pi(a|s) Q^\pi(s,a) Vπ(s)=∑aπ(a∣s)Qπ(s,a) | 状态价值 = 动作价值的加权平均 |
| MDP贝尔曼 | V π ( s ) = ∑ a π ( a ∣ s ) R ( s , a ) + γ ∑ s ′ P V π ( s ′ ) V^\pi(s) = \sum_a \pi(a|s)R(s,a) + \\gamma \\sum_{s'} P V\^\\pi(s') Vπ(s)=∑aπ(a∣s)R(s,a)+γ∑s′PVπ(s′) | 多了动作选择的加权 |
| 最优贝尔曼 | V ∗ ( s ) = max a R ( s , a ) + γ ∑ s ′ P V ∗ ( s ′ ) V^*(s) = \max_a R(s,a) + \\gamma \\sum_{s'} P V\^\*(s') V∗(s)=maxaR(s,a)+γ∑s′PV∗(s′) | 把加权平均换成取最大 |
本部分的所有代码
python
import numpy as np
np.random.seed(0)
# =============================================================================
# 3.3 马尔可夫奖励过程 (MRP)
# =============================================================================
# MRP的状态转移矩阵 (6个状态: s1, s2, s3, s4, s5, s6)
P_mrp = [
[0.9, 0.1, 0.0, 0.0, 0.0, 0.0], # s1
[0.5, 0.0, 0.5, 0.0, 0.0, 0.0], # s2
[0.0, 0.0, 0.0, 0.6, 0.0, 0.4], # s3
[0.0, 0.0, 0.0, 0.0, 0.3, 0.7], # s4
[0.0, 0.2, 0.3, 0.5, 0.0, 0.0], # s5
[0.0, 0.0, 0.0, 0.0, 0.0, 1.0], # s6 (终止状态)
]
P_mrp = np.array(P_mrp)
# MRP的奖励函数 (进入每个状态的奖励)
rewards_mrp = [-1, -2, -2, 10, 1, 0]
# 折扣因子
gamma = 0.5
# -----------------------------------------------------------------------------
# 3.3.1 计算回报 (Return)
# -----------------------------------------------------------------------------
def compute_return(start_index, chain, gamma):
"""
计算一条轨迹的回报
start_index: 从轨迹的哪个位置开始计算
chain: 状态序列,如 [1, 2, 3, 6] 表示 s1 -> s2 -> s3 -> s6
gamma: 折扣因子
"""
G = 0
for i in reversed(range(start_index, len(chain))):
G = gamma * G + rewards_mrp[chain[i] - 1]
return G
# 示例:计算轨迹 s1 -> s2 -> s3 -> s6 的回报
chain = [1, 2, 3, 6]
start_index = 0
G = compute_return(start_index, chain, gamma)
print("=" * 60)
print("3.3.1 回报计算")
print("=" * 60)
print(f"轨迹: {chain}")
print(f"根据本序列计算得到回报为:{G}")
# -----------------------------------------------------------------------------
# 3.3.2 价值函数 - 解析解
# -----------------------------------------------------------------------------
def compute(P, rewards, gamma, states_num):
"""
利用贝尔曼方程的矩阵形式计算解析解
V = (I - γP)^(-1) * R
"""
rewards = np.array(rewards).reshape((-1, 1))
value = np.dot(np.linalg.inv(np.eye(states_num, states_num) - gamma * P),
rewards)
return value
# 计算MRP中每个状态的价值
V_mrp = compute(P_mrp, rewards_mrp, gamma, 6)
print("\n" + "=" * 60)
print("3.3.2 MRP价值函数(解析解)")
print("=" * 60)
print("MRP中每个状态价值分别为:")
print(V_mrp)
# =============================================================================
# 3.4 马尔可夫决策过程 (MDP)
# =============================================================================
print("\n" + "=" * 60)
print("3.4 马尔可夫决策过程 (MDP)")
print("=" * 60)
# 状态集合
S = ["s1", "s2", "s3", "s4", "s5"]
# 动作集合
A = ["保持s1", "前往s1", "前往s2", "前往s3", "前往s4", "前往s5", "概率前往"]
# 状态转移函数 P(s'|s,a)
# 格式: "状态-动作-下一状态": 概率
P = {
"s1-保持s1-s1": 1.0,
"s1-前往s2-s2": 1.0,
"s2-前往s1-s1": 1.0,
"s2-前往s3-s3": 1.0,
"s3-前往s4-s4": 1.0,
"s3-前往s5-s5": 1.0,
"s4-前往s5-s5": 1.0,
"s4-概率前往-s2": 0.2,
"s4-概率前往-s3": 0.4,
"s4-概率前往-s4": 0.4,
}
# 奖励函数 R(s,a)
# 格式: "状态-动作": 奖励
R = {
"s1-保持s1": -1,
"s1-前往s2": 0,
"s2-前往s1": -1,
"s2-前往s3": -2,
"s3-前往s4": -2,
"s3-前往s5": 0,
"s4-前往s5": 10,
"s4-概率前往": 1,
}
gamma = 0.5
# MDP元组
MDP = (S, A, P, R, gamma)
# 策略1: 随机策略 (每个动作50%概率)
Pi_1 = {
"s1-保持s1": 0.5,
"s1-前往s2": 0.5,
"s2-前往s1": 0.5,
"s2-前往s3": 0.5,
"s3-前往s4": 0.5,
"s3-前往s5": 0.5,
"s4-前往s5": 0.5,
"s4-概率前往": 0.5,
}
# 策略2: 自定义策略
Pi_2 = {
"s1-保持s1": 0.6,
"s1-前往s2": 0.4,
"s2-前往s1": 0.3,
"s2-前往s3": 0.7,
"s3-前往s4": 0.5,
"s3-前往s5": 0.5,
"s4-前往s5": 0.1,
"s4-概率前往": 0.9,
}
def join(str1, str2):
"""把两个字符串通过"-"连接"""
return str1 + '-' + str2
# -----------------------------------------------------------------------------
# MDP转化为MRP (边缘化)
# -----------------------------------------------------------------------------
print("\n" + "-" * 60)
print("MDP转化为MRP(边缘化)")
print("-" * 60)
# 转化后的MRP的状态转移矩阵
# 通过边缘化计算: P_mrp(s'|s) = Σ_a π(a|s) * P(s'|s,a)
P_from_mdp_to_mrp = [
[0.5, 0.5, 0.0, 0.0, 0.0], # s1: 50%留在s1, 50%去s2
[0.5, 0.0, 0.5, 0.0, 0.0], # s2: 50%去s1, 50%去s3
[0.0, 0.0, 0.0, 0.5, 0.5], # s3: 50%去s4, 50%去s5
[0.0, 0.1, 0.2, 0.2, 0.5], # s4: 边缘化后的结果
[0.0, 0.0, 0.0, 0.0, 1.0], # s5: 终止状态
]
P_from_mdp_to_mrp = np.array(P_from_mdp_to_mrp)
# 转化后的MRP的奖励函数
# 通过边缘化计算: R_mrp(s) = Σ_a π(a|s) * R(s,a)
R_from_mdp_to_mrp = [-0.5, -1.5, -1.0, 5.5, 0]
# 使用解析解计算MDP中的状态价值函数
V_mdp = compute(P_from_mdp_to_mrp, R_from_mdp_to_mrp, gamma, 5)
print("MDP中每个状态价值分别为(使用随机策略Pi_1):")
print(V_mdp)
# =============================================================================
# 3.5 蒙特卡洛方法
# =============================================================================
print("\n" + "=" * 60)
print("3.5 蒙特卡洛方法")
print("=" * 60)
def sample(MDP, Pi, timestep_max, number):
"""
采样函数
MDP: 马尔可夫决策过程元组
Pi: 策略
timestep_max: 限制最长时间步
number: 总共采样序列数
返回: episodes列表,每个episode是(s, a, r, s_next)元组的列表
"""
S, A, P, R, gamma = MDP
episodes = []
for _ in range(number):
episode = []
timestep = 0
s = S[np.random.randint(4)] # 随机选择初始状态(s1-s4)
# 直到到达终止状态s5或超过最大步数
while s != "s5" and timestep <= timestep_max:
timestep += 1
# 根据策略选择动作
rand, temp = np.random.rand(), 0
for a_opt in A:
temp += Pi.get(join(s, a_opt), 0)
if temp > rand:
a = a_opt
r = R.get(join(s, a), 0)
break
# 根据状态转移概率确定下一状态
rand, temp = np.random.rand(), 0
for s_opt in S:
temp += P.get(join(join(s, a), s_opt), 0)
if temp > rand:
s_next = s_opt
break
episode.append((s, a, r, s_next))
s = s_next
episodes.append(episode)
return episodes
# 采样5条序列示例
episodes = sample(MDP, Pi_1, 20, 5)
print("\n采样序列示例:")
print('第一条序列:', episodes[0])
print('第二条序列:', episodes[1])
print('第五条序列:', episodes[4])
def MC(episodes, V, N, gamma):
"""
蒙特卡洛方法估计状态价值
episodes: 采样的序列列表
V: 价值函数字典
N: 状态访问次数字典
gamma: 折扣因子
"""
for episode in episodes:
G = 0
# 从后往前遍历(因为G_t = R_t + γ*G_{t+1})
for i in range(len(episode) - 1, -1, -1):
(s, a, r, s_next) = episode[i]
G = r + gamma * G
N[s] = N[s] + 1
# 增量更新: V(s) = V(s) + (1/N) * (G - V(s))
V[s] = V[s] + (G - V[s]) / N[s]
# 使用蒙特卡洛方法估计状态价值
timestep_max = 20
episodes = sample(MDP, Pi_1, timestep_max, 1000)
gamma = 0.5
V = {"s1": 0, "s2": 0, "s3": 0, "s4": 0, "s5": 0}
N = {"s1": 0, "s2": 0, "s3": 0, "s4": 0, "s5": 0}
MC(episodes, V, N, gamma)
print("\n使用蒙特卡洛方法计算MDP的状态价值为:")
print(V)
# =============================================================================
# 3.6 占用度量
# =============================================================================
print("\n" + "=" * 60)
print("3.6 占用度量")
print("=" * 60)
def occupancy(episodes, s, a, timestep_max, gamma):
"""
计算状态动作对(s,a)的占用度量
episodes: 采样的序列列表
s: 状态
a: 动作
timestep_max: 最大时间步
gamma: 折扣因子
返回: 占用度量值
"""
rho = 0
total_times = np.zeros(timestep_max) # 记录每个时间步的访问次数
occur_times = np.zeros(timestep_max) # 记录(s,a)在每个时间步出现的次数
for episode in episodes:
for i in range(len(episode)):
(s_opt, a_opt, r, s_next) = episode[i]
total_times[i] += 1
if s == s_opt and a == a_opt:
occur_times[i] += 1
for i in reversed(range(timestep_max)):
if total_times[i]:
rho += gamma**i * occur_times[i] / total_times[i]
return (1 - gamma) * rho
# 采样序列用于计算占用度量
gamma = 0.5
timestep_max = 1000
episodes_1 = sample(MDP, Pi_1, timestep_max, 1000)
episodes_2 = sample(MDP, Pi_2, timestep_max, 1000)
# 计算两个策略的占用度量
rho_1 = occupancy(episodes_1, "s4", "概率前往", timestep_max, gamma)
rho_2 = occupancy(episodes_2, "s4", "概率前往", timestep_max, gamma)
print(f"策略1的占用度量 ρ(s4, 概率前往) = {rho_1}")
print(f"策略2的占用度量 ρ(s4, 概率前往) = {rho_2}")
# =============================================================================
# 结果对比
# =============================================================================
print("\n" + "=" * 60)
print("结果对比:解析解 vs 蒙特卡洛")
print("=" * 60)
print(f"{'状态':<6} {'解析解':<12} {'蒙特卡洛':<12}")
print("-" * 30)
states = ["s1", "s2", "s3", "s4", "s5"]
for i, s in enumerate(states):
print(f"{s:<6} {V_mdp[i][0]:<12.4f} {V[s]:<12.4f}")4 动态规划算法
4.1 简介
动态规划:将问题分解为子问题,保存子问题答案避免重复计算。
两种算法:
| 算法 | 核心方程 |
|---|---|
| 策略迭代 | 贝尔曼期望方程 |
| 价值迭代 | 贝尔曼最优方程 |
前提条件:需要知道完整的 MDP(状态转移函数、奖励函数),即"白盒环境"。
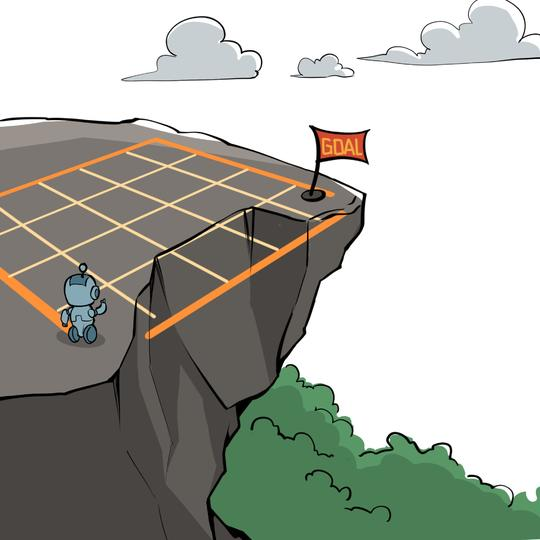
4.2 悬崖漫步环境
- 4×12 网格,共48个状态
- 起点:左下角 | 终点:右下角
- 底部中间是悬崖
- 每步奖励:-1 | 掉悬崖:-100
4.3 策略迭代算法
| 步骤 | 做什么 |
|---|---|
| 策略评估 | 按当前策略,算每个状态的得分 |
| 策略提升 | 在每个状态,贪心选得分最高的动作 |
| 再评估 | 用新策略重新算得分 |
| 再提升 | 看看还能不能更好 |
4.3.1 策略评估
目标:给定策略 π,计算状态价值函数 V
公式:
V ( s ) = ∑ a π ( a ∣ s ) ∑ s ′ P ( s ′ ∣ s , a ) r + γ V ( s ′ ) V(s) = \sum_a \pi(a|s) \sum_{s'} P(s'|s,a) r + \\gamma V(s') V(s)=a∑π(a∣s)s′∑P(s′∣s,a)r+γV(s′)
迭代更新 V,直到变化量 Δ < θ 收敛。
4.3.2 策略提升
目标:根据 V 改进策略 π
方法:贪心选择 Q 值最大的动作
π ( s ) = arg max a r ( s , a ) + γ ∑ s ′ P ( s ′ ∣ s , a ) V ( s ′ ) \pi(s) = \arg\max_a \left r(s,a) + \\gamma \\sum_{s'} P(s'\|s,a) V(s') \\right π(s)=argamaxr(s,a)+γs′∑P(s′∣s,a)V(s′)
策略提升定理:新策略不比旧策略差
V π n e w ( s ) ≥ V π o l d ( s ) V^{\pi_{new}}(s) \geq V^{\pi_{old}}(s) Vπnew(s)≥Vπold(s)
4.3.3 策略迭代流程
π 0 → 评估 V π 0 → 提升 π 1 → 评估 V π 1 → 提升 π 2 → 评估 ⋯ → 提升 π ∗ \pi_0 \xrightarrow{评估} V^{\pi_0} \xrightarrow{提升} \pi_1 \xrightarrow{评估} V^{\pi_1} \xrightarrow{提升} \pi_2 \xrightarrow{评估} \cdots \xrightarrow{提升} \pi^* π0评估 Vπ0提升 π1评估 Vπ1提升 π2评估 ⋯提升 π∗
当 π 不再变化时,收敛到最优策略。
4.4 价值迭代算法
核心思想:不维护策略,直接用 max 更新 V
公式:
V ( s ) = max a r ( s , a ) + γ ∑ s ′ P ( s ′ ∣ s , a ) V ( s ′ ) V(s) = \max_a \left r(s,a) + \\gamma \\sum_{s'} P(s'\|s,a) V(s') \\right V(s)=amaxr(s,a)+γs′∑P(s′∣s,a)V(s′)
最后提取策略:
π ( s ) = arg max a r ( s , a ) + γ ∑ s ′ P ( s ′ ∣ s , a ) V ( s ′ ) \pi(s) = \arg\max_a \left r(s,a) + \\gamma \\sum_{s'} P(s'\|s,a) V(s') \\right π(s)=argamaxr(s,a)+γs′∑P(s′∣s,a)V(s′)
V 收敛后,用 argmax 提取最优策略。
本部分的代码
python
import copy
class CliffWalkingEnv:
""" 悬崖漫步环境"""
def __init__(self, ncol=12, nrow=4):
self.ncol = ncol # 定义网格世界的列
self.nrow = nrow # 定义网格世界的行
# 转移矩阵P[state][action] = [(p, next_state, reward, done)]包含下一个状态和奖励
self.P = self.createP()
def createP(self):
# 初始化
P = [[[] for j in range(4)] for i in range(self.nrow * self.ncol)]
# 4种动作, change[0]:上,change[1]:下, change[2]:左, change[3]:右。坐标系原点(0,0)
# 定义在左上角
change = [[0, -1], [0, 1], [-1, 0], [1, 0]]
for i in range(self.nrow):
for j in range(self.ncol):
for a in range(4):
# 位置在悬崖或者目标状态,因为无法继续交互,任何动作奖励都为0
if i == self.nrow - 1 and j > 0:
P[i * self.ncol + j][a] = [(1, i * self.ncol + j, 0,
True)]
continue
# 其他位置
next_x = min(self.ncol - 1, max(0, j + change[a][0]))
next_y = min(self.nrow - 1, max(0, i + change[a][1]))
next_state = next_y * self.ncol + next_x
reward = -1
done = False
# 下一个位置在悬崖或者终点
if next_y == self.nrow - 1 and next_x > 0:
done = True
if next_x != self.ncol - 1: # 下一个位置在悬崖
reward = -100
P[i * self.ncol + j][a] = [(1, next_state, reward, done)]
return P
class PolicyIteration:
""" 策略迭代算法 """
def __init__(self, env, theta, gamma):
self.env = env
self.v = [0] * self.env.ncol * self.env.nrow # 初始化价值为0
self.pi = [[0.25, 0.25, 0.25, 0.25]
for i in range(self.env.ncol * self.env.nrow)] # 初始化为均匀随机策略
self.theta = theta # 策略评估收敛阈值
self.gamma = gamma # 折扣因子
def policy_evaluation(self): # 策略评估
cnt = 1 # 计数器
while 1:
max_diff = 0
new_v = [0] * self.env.ncol * self.env.nrow
for s in range(self.env.ncol * self.env.nrow):
qsa_list = [] # 开始计算状态s下的所有Q(s,a)价值
for a in range(4):
qsa = 0
for res in self.env.P[s][a]:
p, next_state, r, done = res
qsa += p * (r + self.gamma * self.v[next_state] * (1 - done))
# 本章环境比较特殊,奖励和下一个状态有关,所以需要和状态转移概率相乘
qsa_list.append(self.pi[s][a] * qsa)
new_v[s] = sum(qsa_list) # 状态价值函数和动作价值函数之间的关系
max_diff = max(max_diff, abs(new_v[s] - self.v[s]))
self.v = new_v
if max_diff < self.theta: break # 满足收敛条件,退出评估迭代
cnt += 1
print("策略评估进行%d轮后完成" % cnt)
def policy_improvement(self): # 策略提升
for s in range(self.env.nrow * self.env.ncol):
qsa_list = []
for a in range(4):
qsa = 0
for res in self.env.P[s][a]:
p, next_state, r, done = res
qsa += p * (r + self.gamma * self.v[next_state] * (1 - done))
qsa_list.append(qsa)
maxq = max(qsa_list)
cntq = qsa_list.count(maxq) # 计算有几个动作得到了最大的Q值
# 让这些动作均分概率
self.pi[s] = [1 / cntq if q == maxq else 0 for q in qsa_list]
print("策略提升完成")
return self.pi
def policy_iteration(self): # 策略迭代
while 1:
self.policy_evaluation()
old_pi = copy.deepcopy(self.pi) # 将列表进行深拷贝,方便接下来进行比较
new_pi = self.policy_improvement()
if old_pi == new_pi: break
def print_agent(agent, action_meaning, disaster=[], end=[]):
print("状态价值:")
for i in range(agent.env.nrow):
for j in range(agent.env.ncol):
# 为了输出美观,保持输出6个字符
print('%6.6s' % ('%.3f' % agent.v[i * agent.env.ncol + j]), end=' ')
print()
print("策略:")
for i in range(agent.env.nrow):
for j in range(agent.env.ncol):
# 一些特殊的状态,例如悬崖漫步中的悬崖
if (i * agent.env.ncol + j) in disaster:
print('****', end=' ')
elif (i * agent.env.ncol + j) in end: # 目标状态
print('EEEE', end=' ')
else:
a = agent.pi[i * agent.env.ncol + j]
pi_str = ''
for k in range(len(action_meaning)):
pi_str += action_meaning[k] if a[k] > 0 else 'o'
print(pi_str, end=' ')
print()
class ValueIteration:
""" 价值迭代算法 """
def __init__(self, env, theta, gamma):
self.env = env
self.v = [0] * self.env.ncol * self.env.nrow # 初始化价值为0
self.theta = theta # 价值收敛阈值
self.gamma = gamma
# 价值迭代结束后得到的策略
self.pi = [None for i in range(self.env.ncol * self.env.nrow)]
def value_iteration(self):
cnt = 0
while 1:
max_diff = 0
new_v = [0] * self.env.ncol * self.env.nrow
for s in range(self.env.ncol * self.env.nrow):
qsa_list = [] # 开始计算状态s下的所有Q(s,a)价值
for a in range(4):
qsa = 0
for res in self.env.P[s][a]:
p, next_state, r, done = res
qsa += p * (r + self.gamma * self.v[next_state] * (1 - done))
qsa_list.append(qsa) # 这一行和下一行代码是价值迭代和策略迭代的主要区别
new_v[s] = max(qsa_list)
max_diff = max(max_diff, abs(new_v[s] - self.v[s]))
self.v = new_v
if max_diff < self.theta: break # 满足收敛条件,退出评估迭代
cnt += 1
print("价值迭代一共进行%d轮" % cnt)
self.get_policy()
def get_policy(self): # 根据价值函数导出一个贪婪策略
for s in range(self.env.nrow * self.env.ncol):
qsa_list = []
for a in range(4):
qsa = 0
for res in self.env.P[s][a]:
p, next_state, r, done = res
qsa += p * (r + self.gamma * self.v[next_state] * (1 - done))
qsa_list.append(qsa)
maxq = max(qsa_list)
cntq = qsa_list.count(maxq) # 计算有几个动作得到了最大的Q值
# 让这些动作均分概率
self.pi[s] = [1 / cntq if q == maxq else 0 for q in qsa_list]
env = CliffWalkingEnv()
action_meaning = ['^', 'v', '<', '>']
theta = 0.001
gamma = 0.9
# 价值迭代
agent = ValueIteration(env, theta, gamma)
agent.value_iteration()
print_agent(agent, action_meaning, list(range(37, 47)), [47])
# 策略迭代
agent = PolicyIteration(env, theta, gamma)
agent.policy_iteration()
print_agent(agent, action_meaning, list(range(37, 47)), [47])5 时序差分算法
5.1 时序差分 vs 蒙特卡洛
核心区别
| 方法 | 用什么来更新 |
|---|---|
| 蒙特卡洛 | 等整个序列结束,用真实的完整回报 G t G_t Gt |
| 时序差分 | 只走一步,用一步奖励 + 下一状态的估计值 |
公式对比
蒙特卡洛:
V ( S t ) ← V ( S t ) + α G t − V ( S t ) V(S_t) \leftarrow V(S_t) + \alpha \leftG_t - V(S_t)\\right V(St)←V(St)+αGt−V(St)
其中 G t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + ⋯ G_t = R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \cdots Gt=Rt+1+γRt+2+γ2Rt+3+⋯(要等到序列结束才能算出来)
时序差分:
V ( S t ) ← V ( S t ) + α R t + 1 + γ V ( S t + 1 ) − V ( S t ) V(S_t) \leftarrow V(S_t) + \alpha \leftR_{t+1} + \\gamma V(S_{t+1}) - V(S_t)\\right V(St)←V(St)+αRt+1+γV(St+1)−V(St)
关键思想 :把后面一长串 γ 2 R t + 3 + γ 3 R t + 4 + ⋯ \gamma^2 R_{t+3} + \gamma^3 R_{t+4} + \cdots γ2Rt+3+γ3Rt+4+⋯ 全都压缩 成一个 V ( S t + 1 ) V(S_{t+1}) V(St+1)。
优缺点对比
| 蒙特卡洛 | 时序差分 | |
|---|---|---|
| 需要等序列结束 | ✅ 是 | ❌ 不需要 |
| 偏差 | 无(用真实回报) | 有(用估计值) |
| 方差 | 高(整条路径随机性累积) | 低(只有一步随机性) |
5.2 Sarsa 算法
核心公式
Q ( S t , A t ) ← Q ( S t , A t ) + α R t + 1 + γ Q ( S t + 1 , A t + 1 ) − Q ( S t , A t ) Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha \leftR_{t+1} + \\gamma Q(S_{t+1}, A_{t+1}) - Q(S_t, A_t)\\right Q(St,At)←Q(St,At)+αRt+1+γQ(St+1,At+1)−Q(St,At)
符号说明
| 符号 | 含义 |
|---|---|
| S t S_t St | 当前状态 |
| A t A_t At | 当前执行的动作 |
| R t + 1 R_{t+1} Rt+1 | 执行动作后得到的奖励 |
| S t + 1 S_{t+1} St+1 | 到达的新状态 |
| A t + 1 A_{t+1} At+1 | 在新状态下实际选择的下一个动作 |
| α \alpha α | 学习率 |
| γ \gamma γ | 折扣因子 |
公式结构
Q ( S t , A t ) ⏟ 旧估计 ← Q ( S t , A t ) ⏟ 旧估计 + α R t + 1 + γ Q ( S t + 1 , A t + 1 ) ⏟ TD目标 − Q ( S t , A t ) ⏟ 旧估计 \underbrace{Q(S_t, A_t)}{\text{旧估计}} \leftarrow \underbrace{Q(S_t, A_t)}{\text{旧估计}} + \alpha \left\\underbrace{R_{t+1} + \\gamma Q(S_{t+1}, A_{t+1})}_{\\text{TD目标}} - \\underbrace{Q(S_t, A_t)}_{\\text{旧估计}}\\right 旧估计 Q(St,At)←旧估计 Q(St,At)+α TD目标 Rt+1+γQ(St+1,At+1)−旧估计 Q(St,At)
也可以写成:
Q ( S t , A t ) ← Q ( S t , A t ) + α ⋅ δ t ⏟ TD误差 Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha \cdot \underbrace{\delta_t}_{\text{TD误差}} Q(St,At)←Q(St,At)+α⋅TD误差 δt
和策略迭代的关系
策略迭代 = 策略评估 + 策略改进
↓ ↓
算出V或Q 根据Q选更好的动作策略评估:给定策略 π \pi π,计算它的价值函数 V π V^\pi Vπ 或 Q π Q^\pi Qπ
策略改进:根据价值函数,用贪婪方法得到更好的策略
动态规划的局限
动态规划做策略评估时,需要用这个公式:
V ( s ) = ∑ a π ( a ∣ s ) ∑ s ′ P ( s ′ ∣ s , a ) R + γ V ( s ′ ) V(s) = \sum_{a}\pi(a|s)\sum_{s'}P(s'|s,a)\leftR + \\gamma V(s')\\right V(s)=a∑π(a∣s)s′∑P(s′∣s,a)R+γV(s′)
必须知道 P ( s ′ ∣ s , a ) P(s'|s,a) P(s′∣s,a),也就是环境的状态转移概率。但在实际问题中,我们往往不知道环境模型!
Sarsa 的角色:无模型的策略评估
Sarsa 用采样代替了对环境模型的依赖:
| 动态规划 | Sarsa | |
|---|---|---|
| 策略评估 | 用 P ( s ′ ∣ s , a ) P(s'|s,a) P(s′∣s,a) 计算期望 | 用实际交互采样来估计 |
| 需要环境模型 | ✅ 需要 | ❌ 不需要 |
| 评估对象 | V ( s ) V(s) V(s) 或 Q ( s , a ) Q(s,a) Q(s,a) | Q ( s , a ) Q(s,a) Q(s,a) |
策略改进方式的区别
动态规划用纯贪婪:
π ( s ) = arg max a Q ( s , a ) \pi(s) = \arg\max_a Q(s,a) π(s)=argamaxQ(s,a)
Sarsa 用 ε-贪婪:
π ( s ) = { arg max a Q ( s , a ) 概率 1 − ε 随机动作 概率 ε \pi(s) = \begin{cases} \arg\max_a Q(s,a) & \text{概率 } 1-\varepsilon \\ \text{随机动作} & \text{概率 } \varepsilon \end{cases} π(s)={argmaxaQ(s,a)随机动作概率 1−ε概率 ε
为什么要加随机?因为不知道环境模型,必须通过探索来发现哪些动作更好。
评估完整度的区别
动态规划的策略迭代:策略评估要做到完全收敛,然后再改进策略。
Sarsa:不等评估完全收敛,走一步就更新一次 Q,同时也在改进策略 。这其实是广义策略迭代的思想:评估和改进交替进行,不用等一个完全结束再做另一个。
算法分类图
需要环境模型吗?
│
┌──────┴──────┐
│ │
需要 不需要
│ │
动态规划 无模型方法
│ │
┌───┴───┐ ┌────┴────┐
│ │ │ │
策略迭代 价值迭代 蒙特卡洛 时序差分
│
┌────┴────┐
│ │
Sarsa Q-learning5.3 多步 Sarsa 算法
动机:单步 Sarsa vs 蒙特卡洛
| 方法 | 用什么估计回报 |
|---|---|
| 蒙特卡洛 | 完整序列的真实回报 G t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + ⋯ G_t = R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \cdots Gt=Rt+1+γRt+2+γ2Rt+3+⋯ |
| 单步 Sarsa | 一步奖励 + 估计值 R t + 1 + γ Q ( S t + 1 , A t + 1 ) R_{t+1} + \gamma Q(S_{t+1}, A_{t+1}) Rt+1+γQ(St+1,At+1) |
一个用全部真实奖励,一个只用一步。能不能折中一下? 用 n 步真实奖励 + 后面的估计值?
核心思想
n 步 Sarsa:往前看 n 步真实奖励,然后用第 n+1 步的 Q 估计值代替剩余部分。
公式对比
单步 Sarsa(n=1):
Q ( S t , A t ) ← Q ( S t , A t ) + α R t + 1 + γ Q ( S t + 1 , A t + 1 ) − Q ( S t , A t ) Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha\leftR_{t+1} + \\gamma Q(S_{t+1}, A_{t+1}) - Q(S_t, A_t)\\right Q(St,At)←Q(St,At)+αRt+1+γQ(St+1,At+1)−Q(St,At)
2 步 Sarsa(n=2):
Q ( S t , A t ) ← Q ( S t , A t ) + α R t + 1 + γ R t + 2 + γ 2 Q ( S t + 2 , A t + 2 ) − Q ( S t , A t ) Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha\leftR_{t+1} + \\gamma R_{t+2} + \\gamma\^2 Q(S_{t+2}, A_{t+2}) - Q(S_t, A_t)\\right Q(St,At)←Q(St,At)+αRt+1+γRt+2+γ2Q(St+2,At+2)−Q(St,At)
n 步 Sarsa(通用公式):
Q ( S t , A t ) ← Q ( S t , A t ) + α ∑ k = 0 n − 1 γ k R t + k + 1 + γ n Q ( S t + n , A t + n ) − Q ( S t , A t ) Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha\left\\sum_{k=0}\^{n-1}\\gamma\^k R_{t+k+1} + \\gamma\^n Q(S_{t+n}, A_{t+n}) - Q(S_t, A_t)\\right Q(St,At)←Q(St,At)+αk=0∑n−1γkRt+k+1+γnQ(St+n,At+n)−Q(St,At)
为什么要多步?
| 单步 Sarsa | 多步 Sarsa | 蒙特卡洛 | |
|---|---|---|---|
| 偏差 | 大(估计值不准) | 中等 | 无 |
| 方差 | 小 | 中等 | 大 |
| 需要等待 | 1步 | n步 | 整个序列 |
多步 Sarsa 是一个折中 :比单步 Sarsa 偏差更小 (用了更多真实奖励),比蒙特卡洛 方差更小(不用等到最后)。
直观理解
蒙特卡洛 ←--------------- 多步Sarsa ---------------→ 单步Sarsa
↑ ↑ ↑
n=∞ n=5,10... n=1
全用真实奖励 部分真实+部分估计 几乎全靠估计
无偏但高方差 折中 有偏但低方差实际效果
在悬崖漫步实验中,5步 Sarsa 比单步 Sarsa 收敛更快,因为它能更快地把后面的信息传递到前面的状态。
5.4 Q-learning 算法
核心公式
Q ( S t , A t ) ← Q ( S t , A t ) + α R t + 1 + γ max a ′ Q ( S t + 1 , a ′ ) − Q ( S t , A t ) Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha\leftR_{t+1} + \\gamma \\max_{a'} Q(S_{t+1}, a') - Q(S_t, A_t)\\right Q(St,At)←Q(St,At)+αRt+1+γa′maxQ(St+1,a′)−Q(St,At)
和 Sarsa 的唯一区别
| Sarsa | Q-learning | |
|---|---|---|
| 下一步用什么 | Q ( S t + 1 , A t + 1 ) Q(S_{t+1}, A_{t+1}) Q(St+1,At+1) | max a ′ Q ( S t + 1 , a ′ ) \max_{a'} Q(S_{t+1}, a') maxa′Q(St+1,a′) |
| 含义 | 实际会选的动作 | 最优的动作 |
在线策略 vs 离线策略
| Sarsa | Q-learning | |
|---|---|---|
| 需要的数据 | ( S , A , R , S ′ , A ′ ) (S, A, R, S', A') (S,A,R,S′,A′) | ( S , A , R , S ′ ) (S, A, R, S') (S,A,R,S′) |
| 能用旧数据吗 | ❌ 不能 | ✅ 能 |
| 能用别人的数据吗 | ❌ 不能 | ✅ 能 |
| 策略类型 | 在线策略 | 离线策略 |
离线策略的优势:数据可以反复利用,样本效率高,这是后面 DQN 经验回放的基础。
学到的策略差异
| Sarsa | Q-learning | |
|---|---|---|
| 风格 | 保守、安全 | 激进、最优 |
| 悬崖漫步的路线 | 远离悬崖 | 贴着悬崖走 |
| 原因 | 考虑了探索时可能犯错 | 假设之后都选最优 |
算法流程
初始化 Q(s,a) = 0
重复很多个序列:
初始化状态 S
循环直到序列结束:
用 ε-贪婪根据 Q 选动作 A
执行 A,得到 R 和 S'
更新:Q(S,A) ← Q(S,A) + α[R + γ·max Q(S',a') - Q(S,A)]
S ← S'注意:和 Sarsa 不同,不需要先选出 A ′ A' A′。
为什么叫 Q-learning?
因为它直接学习的是最优动作价值函数 Q ∗ ( s , a ) Q^*(s,a) Q∗(s,a),而不是某个特定策略的 Q 值。
贝尔曼最优方程:
Q ∗ ( s , a ) = E R + γ max a ′ Q ∗ ( S ′ , a ′ ) Q^*(s,a) = \mathbb{E}\leftR + \\gamma \\max_{a'} Q\^\*(S', a')\\right Q∗(s,a)=ER+γa′maxQ∗(S′,a′)
Q-learning 就是在用采样的方式逼近这个方程。
一句话总结
Q-learning = 用 TD 方法 + 取 max + 离线策略,直接学最优 Q 值
5.5 本章总结
算法公式汇总
| 算法 | 更新公式 |
|---|---|
| TD(更新V) | V ( S t ) ← V ( S t ) + α R t + 1 + γ V ( S t + 1 ) − V ( S t ) V(S_t) \leftarrow V(S_t) + \alphaR_{t+1} + \\gamma V(S_{t+1}) - V(S_t) V(St)←V(St)+αRt+1+γV(St+1)−V(St) |
| Sarsa | Q ( S t , A t ) ← Q ( S t , A t ) + α R t + 1 + γ Q ( S t + 1 , A t + 1 ) − Q ( S t , A t ) Q(S_t,A_t) \leftarrow Q(S_t,A_t) + \alphaR_{t+1} + \\gamma Q(S_{t+1},A_{t+1}) - Q(S_t,A_t) Q(St,At)←Q(St,At)+αRt+1+γQ(St+1,At+1)−Q(St,At) |
| Q-learning | Q ( S t , A t ) ← Q ( S t , A t ) + α R t + 1 + γ max a ′ Q ( S t + 1 , a ′ ) − Q ( S t , A t ) Q(S_t,A_t) \leftarrow Q(S_t,A_t) + \alphaR_{t+1} + \\gamma \\max_{a'} Q(S_{t+1},a') - Q(S_t,A_t) Q(St,At)←Q(St,At)+αRt+1+γmaxa′Q(St+1,a′)−Q(St,At) |
Sarsa vs Q-learning 核心对比
| Sarsa | Q-learning | |
|---|---|---|
| 下一步动作 | 实际选的 A t + 1 A_{t+1} At+1 | 最优的 max \max max |
| 策略类型 | 在线策略 | 离线策略 |
| 能用旧数据 | ❌ | ✅ |
| 学到的策略 | 保守 | 最优 |
本部分的所有代码
python
"""
第5章 时序差分算法
包含:Sarsa、n步Sarsa、Q-learning
环境:悬崖漫步(Cliff Walking)
"""
import numpy as np
import matplotlib.pyplot as plt
from tqdm import tqdm
# ==================== 环境 ====================
class CliffWalkingEnv:
"""悬崖漫步环境"""
def __init__(self, ncol, nrow):
self.nrow = nrow
self.ncol = ncol
self.x = 0
self.y = self.nrow - 1
def step(self, action):
"""
执行动作,返回下一状态、奖励、是否结束
动作:0上 1下 2左 3右
"""
change = [[0, -1], [0, 1], [-1, 0], [1, 0]]
self.x = min(self.ncol - 1, max(0, self.x + change[action][0]))
self.y = min(self.nrow - 1, max(0, self.y + change[action][1]))
next_state = self.y * self.ncol + self.x
reward = -1
done = False
if self.y == self.nrow - 1 and self.x > 0:
done = True
if self.x != self.ncol - 1: # 掉进悬崖
reward = -100
return next_state, reward, done
def reset(self):
"""重置环境"""
self.x = 0
self.y = self.nrow - 1
return self.y * self.ncol + self.x
# ==================== Sarsa算法 ====================
class Sarsa:
"""Sarsa算法"""
def __init__(self, ncol, nrow, epsilon, alpha, gamma, n_action=4):
self.Q_table = np.zeros([nrow * ncol, n_action])
self.n_action = n_action
self.alpha = alpha # 学习率
self.gamma = gamma # 折扣因子
self.epsilon = epsilon # ε-贪婪参数
def take_action(self, state):
"""ε-贪婪选动作"""
if np.random.random() < self.epsilon:
action = np.random.randint(self.n_action)
else:
action = np.argmax(self.Q_table[state])
return action
def best_action(self, state):
"""返回最优动作(用于打印策略)"""
Q_max = np.max(self.Q_table[state])
a = [0 for _ in range(self.n_action)]
for i in range(self.n_action):
if self.Q_table[state, i] == Q_max:
a[i] = 1
return a
def update(self, s0, a0, r, s1, a1):
"""Sarsa更新:用实际选的动作a1"""
td_error = r + self.gamma * self.Q_table[s1, a1] - self.Q_table[s0, a0]
self.Q_table[s0, a0] += self.alpha * td_error
# ==================== n步Sarsa算法 ====================
class NStepSarsa:
"""n步Sarsa算法"""
def __init__(self, n, ncol, nrow, epsilon, alpha, gamma, n_action=4):
self.Q_table = np.zeros([nrow * ncol, n_action])
self.n_action = n_action
self.alpha = alpha
self.gamma = gamma
self.epsilon = epsilon
self.n = n # n步
self.state_list = [] # 存储轨迹中的状态
self.action_list = [] # 存储轨迹中的动作
self.reward_list = [] # 存储轨迹中的奖励
def take_action(self, state):
"""ε-贪婪选动作"""
if np.random.random() < self.epsilon:
action = np.random.randint(self.n_action)
else:
action = np.argmax(self.Q_table[state])
return action
def best_action(self, state):
"""返回最优动作"""
Q_max = np.max(self.Q_table[state])
a = [0 for _ in range(self.n_action)]
for i in range(self.n_action):
if self.Q_table[state, i] == Q_max:
a[i] = 1
return a
def update(self, s0, a0, r, s1, a1, done):
"""n步Sarsa更新"""
self.state_list.append(s0)
self.action_list.append(a0)
self.reward_list.append(r)
if len(self.state_list) == self.n:
G = self.Q_table[s1, a1]
for i in reversed(range(self.n)):
G = self.gamma * G + self.reward_list[i]
if done and i > 0:
s = self.state_list[i]
a = self.action_list[i]
self.Q_table[s, a] += self.alpha * (G - self.Q_table[s, a])
s = self.state_list.pop(0)
a = self.action_list.pop(0)
self.reward_list.pop(0)
self.Q_table[s, a] += self.alpha * (G - self.Q_table[s, a])
if done:
self.state_list = []
self.action_list = []
self.reward_list = []
# ==================== Q-learning算法 ====================
class QLearning:
"""Q-learning算法"""
def __init__(self, ncol, nrow, epsilon, alpha, gamma, n_action=4):
self.Q_table = np.zeros([nrow * ncol, n_action])
self.n_action = n_action
self.alpha = alpha
self.gamma = gamma
self.epsilon = epsilon
def take_action(self, state):
"""ε-贪婪选动作"""
if np.random.random() < self.epsilon:
action = np.random.randint(self.n_action)
else:
action = np.argmax(self.Q_table[state])
return action
def best_action(self, state):
"""返回最优动作"""
Q_max = np.max(self.Q_table[state])
a = [0 for _ in range(self.n_action)]
for i in range(self.n_action):
if self.Q_table[state, i] == Q_max:
a[i] = 1
return a
def update(self, s0, a0, r, s1):
"""Q-learning更新:用max,不需要a1"""
td_error = r + self.gamma * self.Q_table[s1].max() - self.Q_table[s0, a0]
self.Q_table[s0, a0] += self.alpha * td_error
# ==================== 工具函数 ====================
def print_agent(agent, env, action_meaning, disaster=[], end=[]):
"""打印策略"""
for i in range(env.nrow):
for j in range(env.ncol):
if (i * env.ncol + j) in disaster:
print('****', end=' ')
elif (i * env.ncol + j) in end:
print('EEEE', end=' ')
else:
a = agent.best_action(i * env.ncol + j)
pi_str = ''
for k in range(len(action_meaning)):
pi_str += action_meaning[k] if a[k] > 0 else 'o'
print(pi_str, end=' ')
print()
def train_sarsa(env, agent, num_episodes):
"""训练Sarsa"""
return_list = []
for _ in tqdm(range(num_episodes), desc='Sarsa'):
episode_return = 0
state = env.reset()
action = agent.take_action(state)
done = False
while not done:
next_state, reward, done = env.step(action)
next_action = agent.take_action(next_state)
episode_return += reward
agent.update(state, action, reward, next_state, next_action)
state = next_state
action = next_action
return_list.append(episode_return)
return return_list
def train_nstep_sarsa(env, agent, num_episodes):
"""训练n步Sarsa"""
return_list = []
for _ in tqdm(range(num_episodes), desc=f'{agent.n}-step Sarsa'):
episode_return = 0
state = env.reset()
action = agent.take_action(state)
done = False
while not done:
next_state, reward, done = env.step(action)
next_action = agent.take_action(next_state)
episode_return += reward
agent.update(state, action, reward, next_state, next_action, done)
state = next_state
action = next_action
return_list.append(episode_return)
return return_list
def train_qlearning(env, agent, num_episodes):
"""训练Q-learning"""
return_list = []
for _ in tqdm(range(num_episodes), desc='Q-learning'):
episode_return = 0
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
next_state, reward, done = env.step(action)
episode_return += reward
agent.update(state, action, reward, next_state)
state = next_state
return_list.append(episode_return)
return return_list
def plot_returns(return_list, title):
"""绘制回报曲线"""
plt.figure(figsize=(10, 6))
plt.plot(return_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title(title)
plt.show()
# ==================== 主函数 ====================
def main():
# 环境参数
ncol, nrow = 12, 4
# 算法参数
epsilon = 0.1
alpha = 0.1
gamma = 0.9
num_episodes = 500
np.random.seed(0)
action_meaning = ['^', 'v', '<', '>']
cliff = list(range(37, 47)) # 悬崖位置
end = [47] # 终点位置
# ========== 1. Sarsa ==========
print("\n" + "="*50)
print("训练 Sarsa")
print("="*50)
env = CliffWalkingEnv(ncol, nrow)
agent_sarsa = Sarsa(ncol, nrow, epsilon, alpha, gamma)
return_list_sarsa = train_sarsa(env, agent_sarsa, num_episodes)
print("\nSarsa 最终策略:")
print_agent(agent_sarsa, env, action_meaning, cliff, end)
plot_returns(return_list_sarsa, 'Sarsa on Cliff Walking')
# ========== 2. 5步Sarsa ==========
print("\n" + "="*50)
print("训练 5步Sarsa")
print("="*50)
np.random.seed(0)
env = CliffWalkingEnv(ncol, nrow)
agent_nstep = NStepSarsa(n=5, ncol=ncol, nrow=nrow,
epsilon=epsilon, alpha=alpha, gamma=gamma)
return_list_nstep = train_nstep_sarsa(env, agent_nstep, num_episodes)
print("\n5步Sarsa 最终策略:")
print_agent(agent_nstep, env, action_meaning, cliff, end)
plot_returns(return_list_nstep, '5-step Sarsa on Cliff Walking')
# ========== 3. Q-learning ==========
print("\n" + "="*50)
print("训练 Q-learning")
print("="*50)
np.random.seed(0)
env = CliffWalkingEnv(ncol, nrow)
agent_ql = QLearning(ncol, nrow, epsilon, alpha, gamma)
return_list_ql = train_qlearning(env, agent_ql, num_episodes)
print("\nQ-learning 最终策略:")
print_agent(agent_ql, env, action_meaning, cliff, end)
plot_returns(return_list_ql, 'Q-learning on Cliff Walking')
# ========== 4. 对比三种算法 ==========
print("\n" + "="*50)
print("三种算法对比")
print("="*50)
plt.figure(figsize=(12, 6))
plt.plot(return_list_sarsa, label='Sarsa', alpha=0.7)
plt.plot(return_list_nstep, label='5-step Sarsa', alpha=0.7)
plt.plot(return_list_ql, label='Q-learning', alpha=0.7)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Comparison of TD Algorithms')
plt.legend()
plt.show()
if __name__ == '__main__':
main()6 Dyan-Q算法
6.1 核心概念
Dyna-Q 是一种基于模型的强化学习算法,核心思想是:
真实学习 + 想象复习 = 学得更快
| 类型 | 说明 |
|---|---|
| Q-learning | 用真实经历更新 Q 表 |
| Q-planning | 用过去的记忆反复复习 |
| Model | 记忆库,存储过去的经历 |
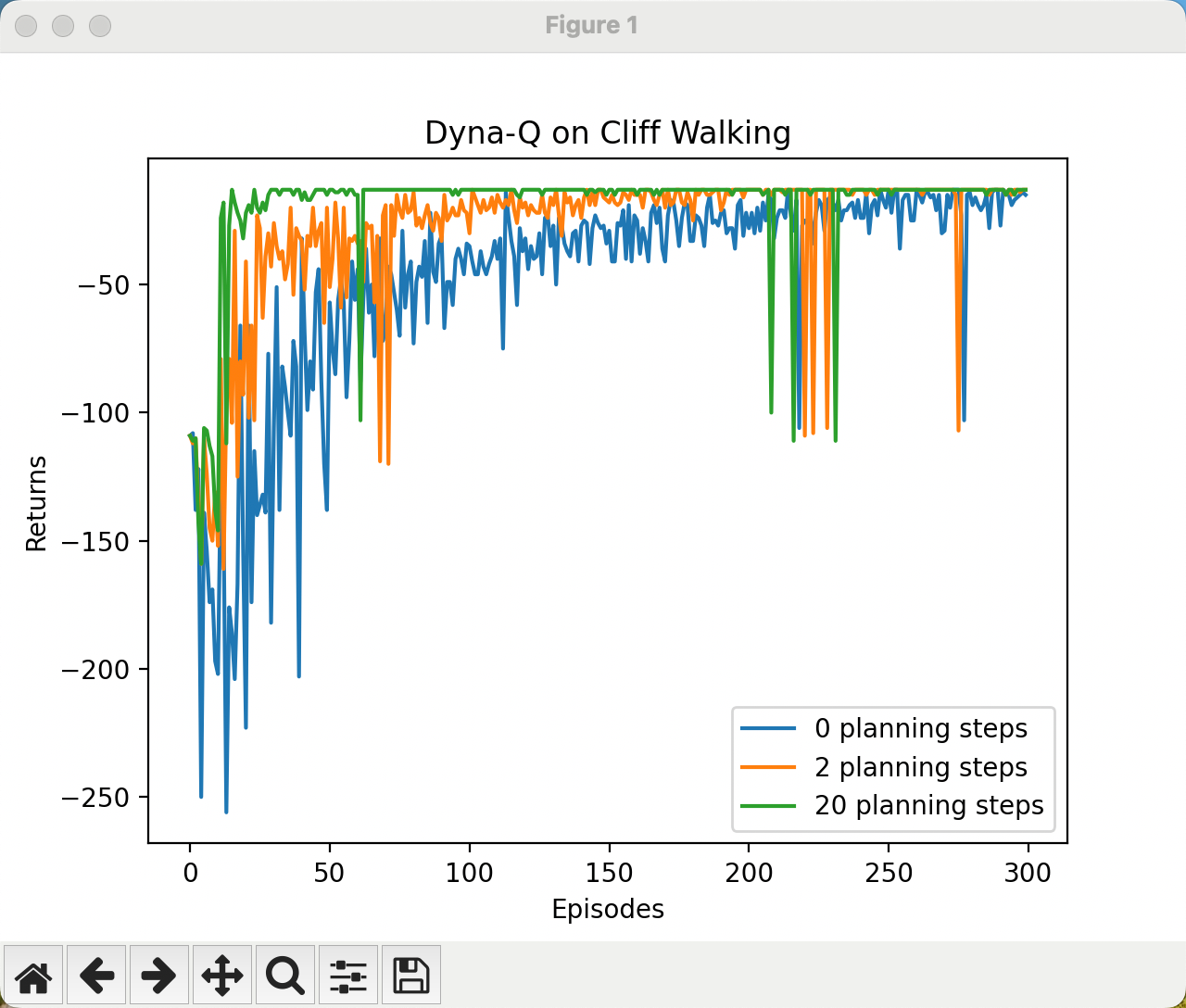
6.2 算法流程
每走一步:
1. 执行 1 次 Q-learning(真实学习)
2. 把经历存入 model(记到错题本)
3. 执行 n 次 Q-planning(翻错题本复习 n 遍)Q_table大概长这样:
动作0 动作1 动作2 动作3
(上) (下) (左) (右)
状态0 [-1.2, -0.5, -2.0, 0.8 ]
状态1 [-0.3, -1.0, 0.2, 1.5 ]
状态2 [ 0.5, -0.8, -0.1, 2.0 ]
...
状态47 [ 0.0, 0.0, 0.0, 0.0 ]本部分的所有代码
python
import matplotlib.pyplot as plt
import numpy as np
from tqdm import tqdm
import random
import time
class CliffWalkingEnv:
def __init__(self, ncol, nrow):
self.nrow = nrow
self.ncol = ncol
self.x = 0
self.y = self.nrow - 1
def step(self,action):
change=[[0,-1],[0,1],[-1,0],[1,0]] # ← 去掉多余的括号
self.x=min(self.ncol-1,max(0,self.x+change[action][0]))
self.y=min(self.nrow-1,max(0,self.y+change[action][1]))
next_state=self.y*self.ncol+self.x
reward=-1
done=False
if self.y==self.nrow-1 and self.x>0:
done=True
if self.x!=self.ncol-1:
reward=-100
return next_state,reward,done
def reset(self): # 这里其实是左下角
self.x=0
self.y=self.nrow-1
return self.y*self.ncol+self.x
class DynaQ:
def __init__(self,ncol,nrow,epsilon,alpha,gamma,planning_steps,n_action=4):
self.Q_table=np.zeros([nrow*ncol,n_action])
self.model=dict()
self.n_action=n_action
self.alpha=alpha
self.gamma=gamma
self.epsilon=epsilon
self.planning_steps=planning_steps
def take_action(self,state):
if np.random.random()<self.epsilon:
action=np.random.randint(self.n_action)
else:
action=np.argmax(self.Q_table[state])
return action
def q_learning(self,s0,a0,r,s1):
td_error=r+self.gamma*self.Q_table[s1].max()-self.Q_table[s0,a0]
self.Q_table[s0,a0]+=self.alpha*td_error
def update(self,s0,a0,r,s1):
self.q_learning(s0,a0,r,s1)
self.model[(s0,a0)]=(r,s1)
for _ in range(self.planning_steps):
s,a=random.choice(list(self.model.keys()))
r_,s_=self.model[(s,a)]
self.q_learning(s,a,r_,s_)
def DynaQ_CliffWalking(n_planning):
ncol=12
nrow=4
env=CliffWalkingEnv(ncol,nrow)
agent=DynaQ(ncol,nrow,epsilon=0.01,alpha=0.1,gamma=0.9,planning_steps=n_planning)
num_episodes=300
return_list=[]
for i in range(10):
with tqdm(total=int(num_episodes / 10), desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes / 10)):
episode_return=0
state=env.reset()
done=False
while not done:
action=agent.take_action(state)
next_state,reward,done=env.step(action)
agent.update(state,action,reward,next_state)
state=next_state
episode_return+=reward
return_list.append(episode_return)
if (i_episode+1)%10==0:
pbar.set_postfix({
'episode':
'%d' % (i_episode + 1 + i * (num_episodes // 10)),
'return':
'%.3f' % np.mean(return_list[-10:])
})
pbar.update(1) # 更新进度条
return return_list
np.random.seed(0)
random.seed(0)
n_planning_list = [0, 2, 20]
for n_planning in n_planning_list:
print('Q-planning步数为:%d' % n_planning)
time.sleep(0.5)
return_list = DynaQ_CliffWalking(n_planning)
episodes_list = list(range(len(return_list)))
plt.plot(episodes_list,
return_list,
label=str(n_planning) + ' planning steps')
plt.legend()
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Dyna-Q on {}'.format('Cliff Walking'))
plt.show()