1.点云中估计主平面法向量
2. 平面数学模型(PCL SACMODEL_PLANE)
任意三点 p1,p2,p3 构成平面:
(只要不共线)
平面法向量由叉乘获得

偏置项 d
3. RANSAC 平面估计数学推导
RANSAC 过程:
Step 1:随机选 3 个点

Step 2:计算平面

Step 3:计算每个点到平面的距离

Step 4:判断 inlier

Step 5:选择 inlier 最多的平面
RANSAC 目标函数:

RANSAC 的问题
RANSAC 得到的是"粗糙"平面,只保证 inliers 多。
最终法向量并不是最精确
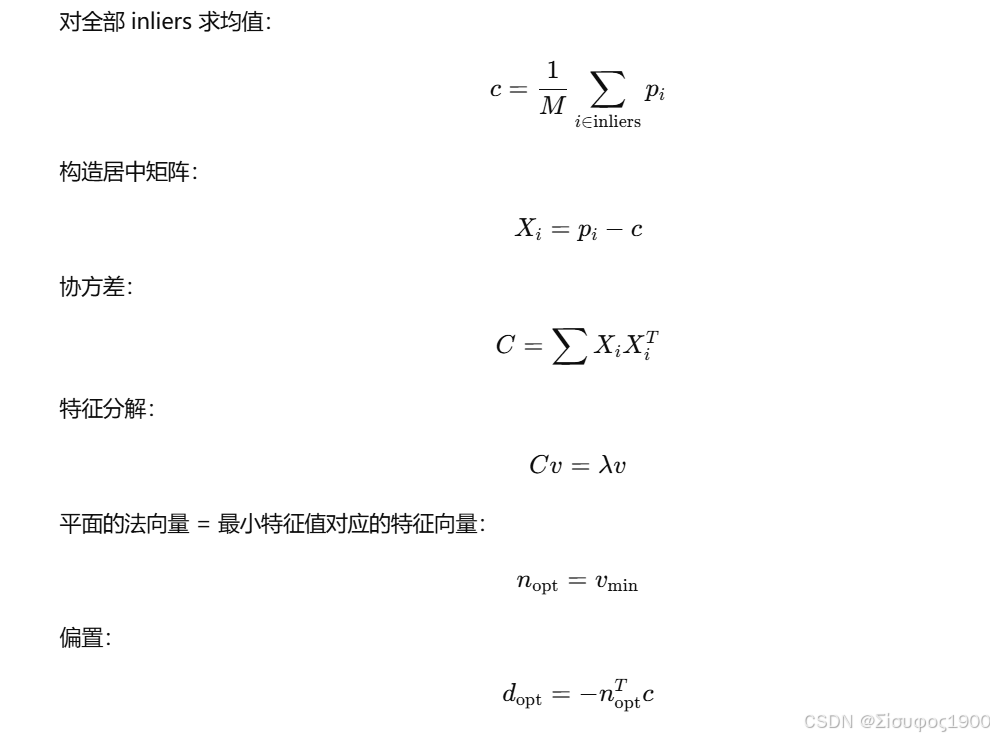
4. 最终精修:PCA 最小二乘平面拟合
PCL 在 segmentation 之后内部会执行:
优化后的法向量 = 最小特征向量
5、MATLAB 完整代码
cpp
%% PCL-Style RANSAC Plane Normal Estimation + Visualization
clc; clear; close all;
%% Load point cloud (replace with your bunny)
% pc = pcread('bun000.ply');
% Q = pc.Location;
% example: random plane + noise
N = 1000;
Q = rand(N,3);
Q(:,3) = 0.3*Q(:,1) + 0.6*Q(:,2) + 0.01*randn(N,1);
%% RANSAC parameters
maxIter = 200;
threshold = 0.01;
bestInliers = [];
%% RANSAC loop
for iter = 1:maxIter
% 1. random 3 points
idx = randperm(size(Q,1),3);
p1 = Q(idx(1),:);
p2 = Q(idx(2),:);
p3 = Q(idx(3),:);
% 2. plane normal
n = cross(p2 - p1, p3 - p1);
if norm(n) < 1e-6
continue;
end
n = n / norm(n);
% 3. d
d = -dot(n,p1);
% 4. distances
dist = abs(Q * n' + d);
% 5. inliers
inliers = find(dist < threshold);
if length(inliers) > length(bestInliers)
bestInliers = inliers;
end
end
fprintf("RANSAC inliers = %d\n", length(bestInliers));
%% Final PCA refinement
P = Q(bestInliers,:);
c = mean(P,1);
Xc = P - c;
C = Xc' * Xc;
[V,D] = eig(C);
[~,minIdx] = min(diag(D));
n_final = V(:,minIdx);
d_final = -dot(n_final,c);
fprintf("Final plane normal: [%.4f %.4f %.4f]\n", n_final);
%% Visualization
figure; hold on; axis equal;
scatter3(Q(:,1),Q(:,2),Q(:,3),5,'b');
scatter3(P(:,1),P(:,2),P(:,3),10,'r','filled');
% draw final normal
quiver3(c(1),c(2),c(3), n_final(1),n_final(2),n_final(3), ...
0.2,'k','LineWidth',3);
legend('All Points','RANSAC Inliers','Plane Normal');
title('PCL-Style RANSAC Plane Normal Estimation');
xlabel X; ylabel Y; zlabel Z;
grid on;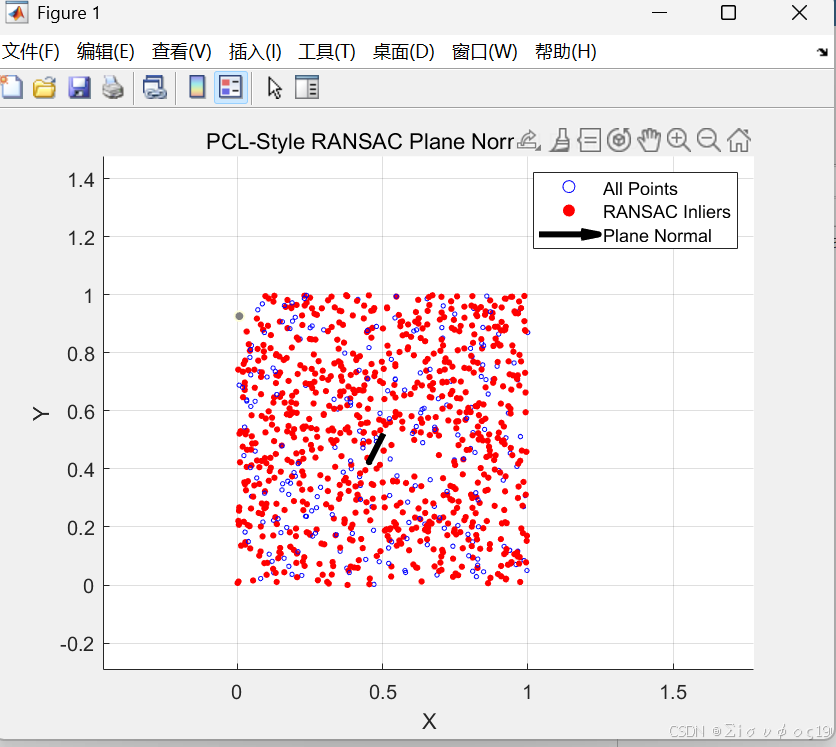
6、PCL 的一一对应关系
| MATLAB 步骤 | PCL C++ 对应函数 |
|---|---|
| 随机采样 3 点 | SampleConsensusModelPlane::computeModelCoefficients |
| 点到平面距离 | selectWithinDistance |
| 选择 inliers 最多 | SACSegmentation::segment |
| 最终 PCA 平面拟合 | optimizeModelCoefficients |