首先,感谢ultralytics又推出了新的yolo系列模型
先安装最新版本的ultralytics
bash
pip install -U ultralytics一、检测模型的onnxruntime推理
1. 导出onnx模型
然后,导出onnx模型
python
from ultralytics import YOLO
def export():
model = YOLO('yolo26s.pt")
model.export(format="onnx")
if __name__ == '__main__':
export()或者使用命令行的方式导出:
bash
yolo export model=./yolo26s.pt format=onnx imgsz=640 opset=122. 使用onnxruntime推理
与v8、v11最大的不同,detect模型v26输出的是300*6, 6->x1,y1,x2,y2,score,class_id
python
import cv2
import os
import numpy as np
import onnxruntime
onnxruntime.preload_dlls()#新版本的onnxruntime-gpu如果调用不了gpu,可以加上这一句命令,或者在import onnxruntime之间import torch
class Yolov26():
def __init__(self, modelpath,classes=80,size=640,confThreshold=0.25,nmsThreshold=0.5):
self.net = onnxruntime.InferenceSession(modelpath,providers='CUDAExecutionProvider'])
self.confThreshold=confThreshold
self.nmsThreshold=nmsThreshold
self.inpWidth = size
self.inpHeight = self.inpWidth
self.classes = classes
self.color = []
for i in range(classes):
self.color.append([np.random.randint(0, 256), np.random.randint(0, 256), np.random.randint(0, 256)])
def resize_image(self, srcimg, keep_ratio=True):
top, left, newh, neww = 0, 0, self.inpWidth, self.inpHeight
if keep_ratio and srcimg.shape[0] != srcimg.shape[1]:
hw_scale = srcimg.shape[0] / srcimg.shape[1]
if hw_scale > 1:
newh, neww = self.inpHeight, int(self.inpWidth / hw_scale)
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_AREA)
left = int((self.inpWidth - neww) * 0.5)
img = cv2.copyMakeBorder(img, 0, 0, left, self.inpWidth - neww - left, cv2.BORDER_CONSTANT,
value=(114, 114, 114)) # add border
else:
newh, neww = int(self.inpHeight * hw_scale), self.inpWidth
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_AREA)
top = int((self.inpHeight - newh) * 0.5)
img = cv2.copyMakeBorder(img, top, self.inpHeight - newh - top, 0, 0, cv2.BORDER_CONSTANT,
value=(114, 114, 114))
else:
img = cv2.resize(srcimg, (self.inpWidth, self.inpHeight), interpolation=cv2.INTER_AREA)
return img, newh, neww, top, left
def postprocessbox(self, frame, outs, padsize=None):
frameHeight = frame.shape[0]
frameWidth = frame.shape[1]
newh, neww, padh, padw = padsize
ratioh, ratiow = frameHeight / newh, frameWidth / neww
confidences = []
boxes = []
classIds = []
for detection in outs:
'''与v8、v11最大的不同,detect模型v26输出的是x1,y1,x2,y2,score,class_id'''
confidence = detection[4]
classId = detection[5]
if confidence > self.confThreshold:
x1 = int( np.ceil( (detection[0] - padw) * ratiow))
y1 = int( np.ceil( (detection[1] - padh) * ratioh))
x2 = int( np.ceil( (detection[2] - padw) * ratiow))
y2 = int( np.ceil( (detection[3] - padh) * ratioh))
boxes.append([int(x1), int(y1), int(x2-x1), int(y2-y1)])
confidences.append(float(confidence))
classIds.append(classId)
# Perform non maximum suppression to eliminate redundant overlapping boxes with
# lower confidences.
idxs = cv2.dnn.NMSBoxes(boxes, confidences, self.confThreshold,self.nmsThreshold)
box=np.zeros((0,4))
labels=np.zeros((0,))
confs=np.zeros((0,))
if len(idxs)>0:
box_seq = idxs.flatten()
box = np.array(boxes)[box_seq]
labels = np.array(classIds)[box_seq]
confs = np.array(confidences)[box_seq]
box[:, 2] += box[:, 0]
box[:, 3] += box[:, 1]
return box.reshape(-1,4).astype('int32'),labels.astype('int32'),confs
else:
return np.array([]),np.array([]),np.array([])
def detect(self,srcimg,crop=False):
self.srcimg = srcimg
img, newh, neww, padh, padw = self.resize_image(self.srcimg)
blob = cv2.dnn.blobFromImage(img, scalefactor=1 / 255.0, swapRB=True)
out = self.net.run(['output0'], {'images': blob})
detouts=out[0][0]
boxes,labels,confs = self.postprocessbox(self.srcimg, detouts, padsize=(newh, neww, padh, padw))
if boxes.shape[0]==0:
return np.zeros((0,4),dtype=np.int32),np.zeros((0,),dtype=np.int32),np.zeros((0,),dtype=np.float32)
else:
return boxes,labels,confs
def draw(self,srcimg,box,label,conf):
for i in range(box.shape[0]):
cv2.rectangle(srcimg, (box[i,0], box[i,1]), (box[i,2], box[i,3]), self.color[label[i]], 2)
cv2.putText(srcimg,'%d:%.2f'%(label[i],conf[i]), (box[i,0], box[i,1]), cv2.FONT_ITALIC, 1, self.color[label[i]], 1)
return srcimg
if __name__ == '__main__':
detectnet1 = Yolov26("yolo26s.onnx",use_gpu=True,classes=80,size=640,confThreshold=0.5)
filepath ='general_images/'
save_path ='temp_result/'
os.makedirs(save_path,exist_ok=True)
for path in os.listdir(filepath):
print(path)
if not path.endswith(".png") and not path.endswith(".jpg") and not path.endswith(".jpeg"):
continue
imgpath=filepath+path
srcimg = cv2.imread(imgpath)
boxes,labels,confs = detectnet1.detect(srcimg)
srcimg = detectnet1.draw(srcimg,boxes,labels,confs)
cv2.imwrite(os.path.join(save_path, path), srcimg)
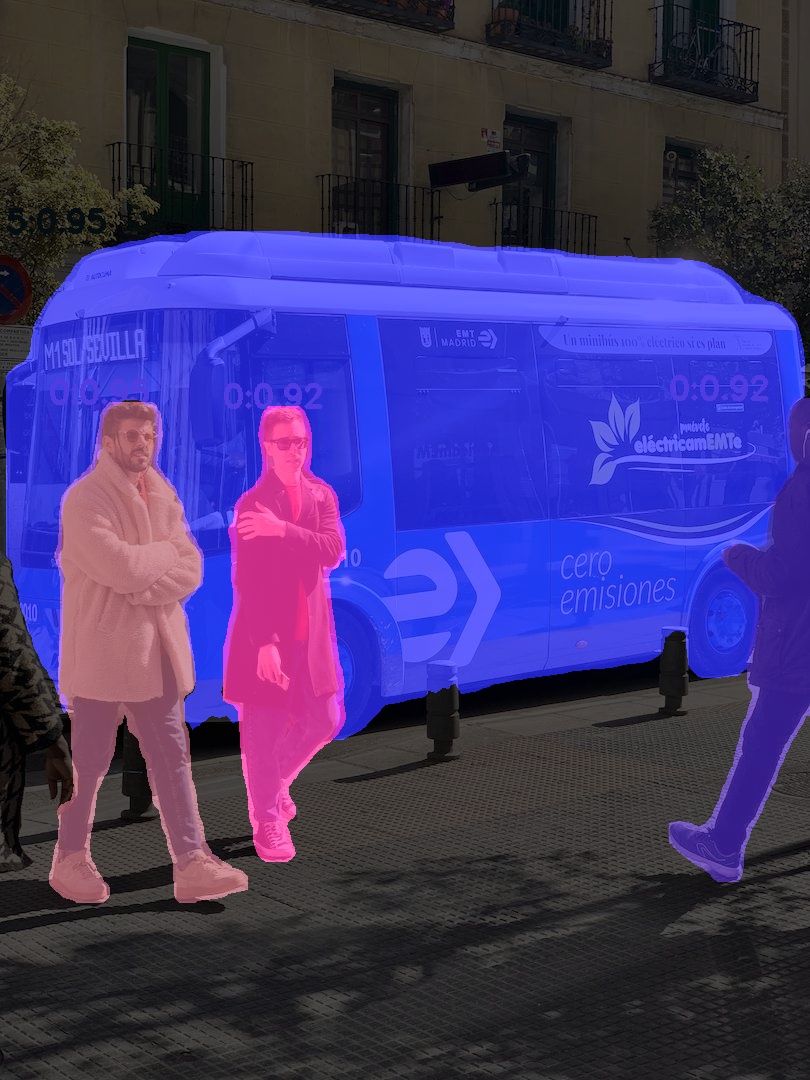
二、分割模型的onnxruntime推理
首先依旧是导出onnx模型
python
from ultralytics import YOLO
def export():
model = YOLO('yolo26s-seg.pt")
model.export(format="onnx")
if __name__ == '__main__':
export()或者使用命令行的方式导出:
bash
yolo export model=./yolo26s-seg.pt format=onnx imgsz=640 opset=122. 使用onnxruntime推理
与v8、v11最大的不同,分割模型一个输出的则是30038 , x1,y1,x2,y2,score,class_id,mask1,mask2,...,mask32
另一个输出跟v8/v11就是一样的了,都是32160*160
python
import os
import time
import cv2
import numpy as np
import onnxruntime
onnxruntime.preload_dlls()
from numpy.random import randint
class Yolov8Seg():
def __init__(self, modelpath,classes=80,input_size = 640):
self.net = onnxruntime.InferenceSession(modelpath,providers=['CUDAExecutionProvider'])
self.confThreshold=0.7
self.nmsThreshold=0.5
self.maskThreshold=0.3
self.inpWidth = input_size
self.inpHeight = self.inpWidth
self.classes = classes
self.segchannel = 32
self.segwidth = self.inpWidth//4
self.segheight = self.inpHeight//4
self.color = []
for i in range(classes):
self.color.append([randint(0, 256), randint(0, 256), randint(0, 256)])
def resize_image(self, srcimg, keep_ratio=True):
top, left, newh, neww = 0, 0, self.inpWidth, self.inpHeight
if keep_ratio and srcimg.shape[0] != srcimg.shape[1]:
hw_scale = srcimg.shape[0] / srcimg.shape[1]
if hw_scale > 1:
newh, neww = self.inpHeight, int(self.inpWidth / hw_scale)
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_AREA)
left = int((self.inpWidth - neww) * 0.5)
img = cv2.copyMakeBorder(img, 0, 0, left, self.inpWidth - neww - left, cv2.BORDER_CONSTANT,
value=(114, 114, 114)) # add border
else:
newh, neww = int(self.inpHeight * hw_scale), self.inpWidth
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_AREA)
top = int((self.inpHeight - newh) * 0.5)
img = cv2.copyMakeBorder(img, top, self.inpHeight - newh - top, 0, 0, cv2.BORDER_CONSTANT,
value=(114, 114, 114))
else:
img = cv2.resize(srcimg, (self.inpWidth, self.inpHeight), interpolation=cv2.INTER_AREA)
return img, newh, neww, top, left
def postprocessbox(self, frame, outs, padsize=None):
frameHeight = frame.shape[0]
frameWidth = frame.shape[1]
newh, neww, padh, padw = padsize
ratioh, ratiow = frameHeight / newh, frameWidth / neww
confidences = []
boxes = []
classIds = []
temp_proto = []
for detection in outs:
confidence = detection[4]
classId = detection[5]
if confidence > self.confThreshold:
x1 = int( np.ceil( (detection[0] - padw) * ratiow))
y1 = int( np.ceil( (detection[1] - padh) * ratioh))
x2 = int( np.ceil( (detection[2] - padw) * ratiow))
y2 = int( np.ceil( (detection[3] - padh) * ratioh))
# 更新检测出来的框
boxes.append([int(x1), int(y1), int(x2-x1), int(y2-y1)])
confidences.append(float(confidence))
classIds.append(classId)
temp_proto.append(detection[6:6+self.segchannel])
# Perform non maximum suppression to eliminate redundant overlapping boxes with
# lower confidences.
idxs = cv2.dnn.NMSBoxes(boxes, confidences, self.confThreshold,self.nmsThreshold)
box=np.zeros((0,4))
labels=np.zeros((0,))
confs=np.zeros((0,))
if len(idxs)>0:
box_seq = idxs.flatten()
box = np.array(boxes)[box_seq]
labels = np.array(classIds)[box_seq]
confs = np.array(confidences)[box_seq]
temp_proto= np.array(temp_proto)[box_seq]
box[:, 2] += box[:, 0]
box[:, 3] += box[:, 1]
return box.reshape(-1,4).astype('int32'),labels.astype('int32'),confs,temp_proto.reshape(-1,32)
else:
return np.array([]),np.array([]),np.array([]),np.array([])
def postprocessmask(self,srcimg,maskouts,temp_proto,boxes,padsize):
newh, neww, padh, padw = padsize
protos=maskouts.reshape(self.segchannel,-1)
matmulRes = temp_proto .dot( protos) #n*(160*160)
masks = matmulRes.reshape(-1,self.segwidth,self.segheight)
masks = 1 / (1+np.exp(-masks))
left,top,width,height=int(padw/self.inpWidth*self.segwidth),int(padh/self.inpHeight*self.segheight),\
int(self.segwidth-padw/2),int(self.segheight-padh/2)
masks_roi=masks[:,top:top+height,left:left+width]
output_mask=[]
for i in range(masks.shape[0]):
masks_roi_resize=cv2.resize(masks_roi[i],(srcimg.shape[1],srcimg.shape[0]))
rect=boxes[i]
mask=masks_roi_resize[rect[1]:rect[3],rect[0]:rect[2]]
mask[mask< self.maskThreshold]=0
mask[mask>0]=1
#缩小一点 减少误识别
#element = cv2.getStructuringElement(cv2.MORPH_RECT, (5,5));
#mask=cv2.erode(mask, element)
# 只保留最大的连通域
contours, _ = cv2.findContours(mask.astype(np.uint8), cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
m = []
for contour in contours:
m.append(cv2.contourArea(contour))
if m:
largest_contour_index = np.argmax(m)
mask = np.zeros_like(mask)
cv2.drawContours(mask, [contours[largest_contour_index]], -1, 1, -1)
output_mask.append(mask)
return output_mask
def detect(self, srcimg):
t0=time.time()
img, newh, neww, padh, padw = self.resize_image(srcimg)
blob = cv2.dnn.blobFromImage(img, scalefactor=1 / 255.0, swapRB=True)
t1=time.time()
# print("preprocess time:",t1-t0)
out = self.net.run(['output0','output1'], {'images': blob})
t2=time.time()
detouts,maskouts=out[0][0],out[1][0]
# print(detouts)
boxes,labels,confs,temp_proto = self.postprocessbox(srcimg, detouts, padsize=(newh, neww, padh, padw))
if boxes.shape[0]==0:
return np.zeros((0,4)),labels,confs,temp_proto
output_mask=self.postprocessmask(srcimg, maskouts,temp_proto, boxes,padsize=(newh, neww, padh, padw))
return boxes,labels,confs,output_mask
def draw(self, srcimg, box, label, conf, output_mask):
mask = np.zeros(srcimg.shape, dtype=np.float32)
for i in range(box.shape[0]):
cv2.rectangle(srcimg, (box[i,0], box[i,1]), (box[i,2], box[i,3]), self.color[label[i]], 3)
cv2.putText(srcimg, '%d:%.2f' % (label[i], conf[i]), (box[i,0], box[i,1]),
cv2.FONT_ITALIC, 1, self.color[label[i]], 3)
x1, y1, x2, y2 = box[i,0], box[i,1], box[i,2], box[i,3]
mask_h, mask_w = output_mask[i].shape[0], output_mask[i].shape[1]
if mask_h > 0 and mask_w > 0 and y2 > y1 and x2 > x1:
mask[y1:y2, x1:x2] = np.maximum(mask[y1:y2, x1:x2],
output_mask[i][:mask_h, :mask_w, np.newaxis].astype(np.float32) * self.color[i])
mask = mask.astype('uint8')
srcimgt = cv2.addWeighted(srcimg, 0.3, mask, 0.8, 1)
return srcimgt
path = './'
detectnet2 = Yolov8Seg(path+'yolo26s-seg.onnx',classes=80,input_size=640)
path =path+ 'images/'
savepath = path+'result/'
for ip in os.listdir(path):
t=time.time()
imgpath=path+ip
srcimg = cv2.imread(imgpath)
boxes1,labels1,confs1,output_mask1 = detectnet2.detect(srcimg)#
srcimg = detectnet2.draw(srcimg, boxes1, labels1, confs1, output_mask1)
print(time.time()-t)
cv2.imwrite(savepath+ip,srcimg)